
Vous aimerez peut-être aussi
- Wind Farms and Their Effect On Radio Navigation AidsDocument4 pagesWind Farms and Their Effect On Radio Navigation AidsicyregPas encore d'évaluation
- 99sqq89 SonarDocument4 pages99sqq89 SonarSérgio SantanaPas encore d'évaluation
- Surveillance Towed Array Sensor System (SURTASS) and Compact Low Frequency Active (CLFA) SystemDocument2 pagesSurveillance Towed Array Sensor System (SURTASS) and Compact Low Frequency Active (CLFA) Systemjoma11Pas encore d'évaluation
- Helios Infographic FinalDocument1 pageHelios Infographic FinalVictor PileggiPas encore d'évaluation
- Methods of Radar Cross-section AnalysisD'EverandMethods of Radar Cross-section AnalysisJ.W. Jr. CrispinPas encore d'évaluation
- Area Rule Richard Whitcomb PDFDocument16 pagesArea Rule Richard Whitcomb PDFMuthyala AkhilPas encore d'évaluation
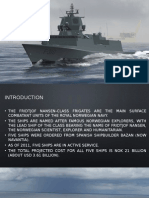
- The Fridtjof Nansen-Class Frigates - Royal Norwegian NavyDocument15 pagesThe Fridtjof Nansen-Class Frigates - Royal Norwegian NavyhindujudaicPas encore d'évaluation
- DuPlessis Extended (2009) - Cross Eye JammerDocument4 pagesDuPlessis Extended (2009) - Cross Eye JammerDhimas AfihandarinPas encore d'évaluation
- MH-60S Multi-Mission Combat Support HelicopterDocument4 pagesMH-60S Multi-Mission Combat Support Helicopterjoma11Pas encore d'évaluation
- NASA Facts Juno Mission To Jupiter March 2009Document2 pagesNASA Facts Juno Mission To Jupiter March 2009Bob Andrepont100% (1)
- Technology in The Littorals - Below The Surface and In-Shore (Linus)Document24 pagesTechnology in The Littorals - Below The Surface and In-Shore (Linus)mahoro100% (1)
- AMRDEC Facilities 2008Document42 pagesAMRDEC Facilities 2008Jim HowlandPas encore d'évaluation
- MK 48 Advanced Capability (ADCAP) Torpedo ModificationsDocument4 pagesMK 48 Advanced Capability (ADCAP) Torpedo Modificationsjoma11Pas encore d'évaluation
- V2 N4 1981 Flanagan Advanced PDFDocument3 pagesV2 N4 1981 Flanagan Advanced PDFraa2010100% (1)
- Naval Postgraduate School: Monterey, CaliforniaDocument86 pagesNaval Postgraduate School: Monterey, CaliforniaWaleedWaelPas encore d'évaluation
- Lesson 1. Introduction The Improved Nlke Herculese Missile SystemDocument11 pagesLesson 1. Introduction The Improved Nlke Herculese Missile SystemAmshgautamPas encore d'évaluation
- 2K12 KUB ModernizationDocument11 pages2K12 KUB Modernizationsvinche43546100% (1)
- Ballistic Missile Defense Test RecordDocument2 pagesBallistic Missile Defense Test RecordStephen LoiaconiPas encore d'évaluation
- 1988 - 2833Document1 page1988 - 2833scorpion_l_810% (1)
- Netherlands MCMDocument3 pagesNetherlands MCMaxiswarlordhcvPas encore d'évaluation
- Nike AjaxDocument12 pagesNike AjaxIshrat Hussain Turi100% (1)
- F-35 Information FusionDocument22 pagesF-35 Information Fusionmahoro100% (1)
- Verification of 1D Surf Model for Steep BeachesDocument41 pagesVerification of 1D Surf Model for Steep BeachesNini Brevis100% (1)
- Military Radars: Raghu Guttennavar 2KL06TE024Document23 pagesMilitary Radars: Raghu Guttennavar 2KL06TE024Shreedhar Todkar100% (1)
- Missile RangeDocument39 pagesMissile RangepraveenPas encore d'évaluation
- Grumman DuckDocument5 pagesGrumman DuckghostburnedPas encore d'évaluation
- Digital radio frequency memory (DRFM) techniques and applicationsDocument7 pagesDigital radio frequency memory (DRFM) techniques and applicationsAjinkya Kale100% (1)
- Airship Powered From SpaceDocument3 pagesAirship Powered From SpaceHugh Fox IIIPas encore d'évaluation
- Global Hawk Program OverviewDocument25 pagesGlobal Hawk Program OverviewEzzy Latrell Kaprangi50% (2)
- Campbell, P. - Comments On - Energy Stored in Permanent MagnetsDocument3 pagesCampbell, P. - Comments On - Energy Stored in Permanent MagnetsDhimas AfihandarinPas encore d'évaluation
- Bell UH-1Y Fact SheetDocument2 pagesBell UH-1Y Fact SheetblazaPas encore d'évaluation
- Agni MissileDocument19 pagesAgni MissileSHIVAJI CHOUDHURYPas encore d'évaluation
- Agat New Generation of Active Radar Homing HeadsDocument2 pagesAgat New Generation of Active Radar Homing HeadsWingexheroPas encore d'évaluation
- GlobalEye Airborne Early Warning and Control (AEW&C) Aircraft - Thai Military and Asian RegionDocument34 pagesGlobalEye Airborne Early Warning and Control (AEW&C) Aircraft - Thai Military and Asian RegionDanielPas encore d'évaluation
- DR Carlo Kopp - Are Helicopters VulnerableDocument5 pagesDR Carlo Kopp - Are Helicopters Vulnerablekairotdf1Pas encore d'évaluation
- U.S. Marines In Battle: Al-Qaim, September 2005-March 2006 [Illustrated Edition]D'EverandU.S. Marines In Battle: Al-Qaim, September 2005-March 2006 [Illustrated Edition]Pas encore d'évaluation
- FVL AAAA Media Brief - FinalDocument12 pagesFVL AAAA Media Brief - Finaldmaju861Pas encore d'évaluation
- Sonar Introduction 2012 Compressed PDFDocument11 pagesSonar Introduction 2012 Compressed PDFBrenno Moura MouraPas encore d'évaluation
- Strength of Ships Sailing in IceDocument233 pagesStrength of Ships Sailing in IceKniem KwenPas encore d'évaluation
- Sunburns, Yakhonts, Alfas and The Region (Australian Aviation, Sept 2000.)Document14 pagesSunburns, Yakhonts, Alfas and The Region (Australian Aviation, Sept 2000.)Cue Pue100% (1)
- Ka-32 Helicopters Performance & SpecificationsDocument27 pagesKa-32 Helicopters Performance & Specifications김덕규100% (1)
- Introduction to Missile AerodynamicsDocument31 pagesIntroduction to Missile AerodynamicsManepalli HarshavardhananPas encore d'évaluation
- Help From AboveDocument472 pagesHelp From AboveBob AndrepontPas encore d'évaluation
- Asw ConopsDocument5 pagesAsw Conopsem_nikolopoulosPas encore d'évaluation
- KRONOS Grand Naval LQ mm07943 PDFDocument2 pagesKRONOS Grand Naval LQ mm07943 PDFsamsulkhoirulanamPas encore d'évaluation
- Branko Petricevic - Activity of The Hydrographic Institute of The Republic of Croatia and Integrated Hydrographic SystemsDocument23 pagesBranko Petricevic - Activity of The Hydrographic Institute of The Republic of Croatia and Integrated Hydrographic Systemslapost_fer100% (1)
- EFT Stratguide GB 72dpiDocument137 pagesEFT Stratguide GB 72dpic4c4100% (1)
- Israel's 2007 Strike on Syria's Nuclear ReactorDocument11 pagesIsrael's 2007 Strike on Syria's Nuclear ReactorPrashant Mishra100% (1)
- Evolving The Relationship Trolling ErDocument19 pagesEvolving The Relationship Trolling ErsamlagronePas encore d'évaluation
- Rodale ALQ-167 CD BandDocument3 pagesRodale ALQ-167 CD BandBlaze123xPas encore d'évaluation
- Cruise Missile Technology Seminar ReportDocument37 pagesCruise Missile Technology Seminar Reportshubham soniPas encore d'évaluation
- AN/BLQ-10(V): Submarine EW Support for 21st CenturyDocument17 pagesAN/BLQ-10(V): Submarine EW Support for 21st Centurydhfsi7496100% (1)
- CAE MAD-XR DatasheetDocument2 pagesCAE MAD-XR Datasheetrengab100% (1)
- Applying CORBA in Military Combat System - Presentation-FINALDocument13 pagesApplying CORBA in Military Combat System - Presentation-FINALPositrim KpisonPas encore d'évaluation
- RTN Sas Ds slq32v5Document2 pagesRTN Sas Ds slq32v5bylexusPas encore d'évaluation
- Reconfigurable Microwave Photonics RadarsDocument4 pagesReconfigurable Microwave Photonics RadarsAlex YangPas encore d'évaluation
- Coaxial Cable DelayDocument6 pagesCoaxial Cable DelayFeberly BarituaPas encore d'évaluation
- ISAR Classification of Sea VesselsDocument1 pageISAR Classification of Sea VesselsAlex YangPas encore d'évaluation
- Photonics For Operating On Multiple Coherent BandsDocument8 pagesPhotonics For Operating On Multiple Coherent BandsAlex YangPas encore d'évaluation
- A Study On Basics of A Spectrum Analyzer: I J A R E E I EDocument8 pagesA Study On Basics of A Spectrum Analyzer: I J A R E E I EAlex YangPas encore d'évaluation
- Spie Agrawal RasmussenDocument11 pagesSpie Agrawal Rasmussenmaadobe27Pas encore d'évaluation
- D 0312015019Document5 pagesD 0312015019inventyPas encore d'évaluation
- Microwave Photonics Signal Generation For Radar ApplicatiomDocument3 pagesMicrowave Photonics Signal Generation For Radar ApplicatiomAlex YangPas encore d'évaluation
- Ijaers Oct 2014 027 PDFDocument3 pagesIjaers Oct 2014 027 PDFAlex YangPas encore d'évaluation
- Spherical Gas Bearing WeightlessnessDocument16 pagesSpherical Gas Bearing WeightlessnessAlex YangPas encore d'évaluation
- (2010) Palumbo - Basic - Missile Homing Guidance - Principles PDFDocument17 pages(2010) Palumbo - Basic - Missile Homing Guidance - Principles PDFAlex YangPas encore d'évaluation
- SpecAnalyzerMeas NoiseDocument32 pagesSpecAnalyzerMeas NoiseAlex YangPas encore d'évaluation
- Design Considerations For Quantum Radar ImplementationDocument9 pagesDesign Considerations For Quantum Radar ImplementationAlex YangPas encore d'évaluation
- (2009) Research On Unbalance Torque of The Three Axis Air Bearing Based PlatformDocument5 pages(2009) Research On Unbalance Torque of The Three Axis Air Bearing Based PlatformAlex YangPas encore d'évaluation
- (2012) Development of A Spherical Air Bearing Positioning SystemDocument9 pages(2012) Development of A Spherical Air Bearing Positioning SystemAlex YangPas encore d'évaluation
- M T D C T L: WavecrestDocument26 pagesM T D C T L: WavecrestAlex YangPas encore d'évaluation
- World's Largest Science, Technology & Medicine Open Access Book PublisherDocument34 pagesWorld's Largest Science, Technology & Medicine Open Access Book PublisherAlex YangPas encore d'évaluation
- Fibers vs. Coax For RF Delay Line ApplicationsDocument2 pagesFibers vs. Coax For RF Delay Line ApplicationsAlex YangPas encore d'évaluation
- Hardware in The LoopDocument11 pagesHardware in The LoopRoxana Karla SzaboPas encore d'évaluation
- (2013) An Overview of Electronic Warfare in Radar SystemsDocument5 pages(2013) An Overview of Electronic Warfare in Radar SystemsAlex Yang100% (1)
- Design of Digital FiltersDocument24 pagesDesign of Digital FiltersDenise NelsonPas encore d'évaluation
- Complex Signal ProcessingDocument12 pagesComplex Signal ProcessingDavid TynanPas encore d'évaluation
- Quadrature Sampling Scheme With Improved Image Rejection For Complex-IF ReceiversDocument4 pagesQuadrature Sampling Scheme With Improved Image Rejection For Complex-IF ReceiversAlex YangPas encore d'évaluation
- Hardware in The LoopDocument11 pagesHardware in The LoopRoxana Karla SzaboPas encore d'évaluation
- Complex Signal ProcessingDocument12 pagesComplex Signal ProcessingDavid TynanPas encore d'évaluation
- Em D P: I N o L: Bedde DS Ntroductio T Digita FiltersDocument19 pagesEm D P: I N o L: Bedde DS Ntroductio T Digita FiltersAlex YangPas encore d'évaluation
- Learn Labview 2013-4 FastDocument43 pagesLearn Labview 2013-4 FastAlex YangPas encore d'évaluation
- (2010) A General Radar Surface Target Echo SimulatorDocument4 pages(2010) A General Radar Surface Target Echo SimulatorAlex YangPas encore d'évaluation
- Dynetics K140357 DRFM Target GeneratorDocument2 pagesDynetics K140357 DRFM Target GeneratorAlex YangPas encore d'évaluation
- DRFM Jammers For Electronic Attack White PaperDocument5 pagesDRFM Jammers For Electronic Attack White PaperAlex YangPas encore d'évaluation
- Model For Calculating The Refractive Index of DiffDocument5 pagesModel For Calculating The Refractive Index of DiffNANPas encore d'évaluation
- HM130 5Document1 pageHM130 5AntonelloPas encore d'évaluation
- 10.8 Special Polar GraphsDocument16 pages10.8 Special Polar GraphsIlias NihaPas encore d'évaluation
- Project PPTDocument47 pagesProject PPTIshant KumawatPas encore d'évaluation
- Final Physics GCSE-EOU AssessmentDocument4 pagesFinal Physics GCSE-EOU AssessmentBehram QureshiPas encore d'évaluation
- RC Beam Deflection and Stress AnalysisDocument4 pagesRC Beam Deflection and Stress AnalysisMaxPas encore d'évaluation
- Maa 2.8 ExponentsDocument12 pagesMaa 2.8 ExponentsMuborakPas encore d'évaluation
- BA (Hons) Philosophy CurriculumDocument123 pagesBA (Hons) Philosophy CurriculumDARSHAN RAAJANPas encore d'évaluation
- Structural Soils Engineer's Quick Reference GuideDocument64 pagesStructural Soils Engineer's Quick Reference GuideGreg McNamaraPas encore d'évaluation
- Problems On Heat Transfer ConductionDocument3 pagesProblems On Heat Transfer ConductionGenerale, Rey marck C.Pas encore d'évaluation
- TheAndTecOfRocExcForCivEng Páginas 283 285,294 302,319 329,449 485Document60 pagesTheAndTecOfRocExcForCivEng Páginas 283 285,294 302,319 329,449 485Omar George Cayllahua SaicoPas encore d'évaluation
- Tomescu PDFDocument353 pagesTomescu PDFLuís Farias100% (3)
- Service Manual New Sigma-Control 2Document132 pagesService Manual New Sigma-Control 2gil_bar_t0% (3)
- Na2xckbr2y Rev 08Document1 pageNa2xckbr2y Rev 08dardakPas encore d'évaluation
- D.Abbas M AlkebsiDocument40 pagesD.Abbas M AlkebsiruchikaPas encore d'évaluation
- JqueryDocument11 pagesJqueryShreyas GuduriPas encore d'évaluation
- Explanation Text About RainbowDocument11 pagesExplanation Text About RainbowBagas FatihPas encore d'évaluation
- DMPA CombinedDocument527 pagesDMPA Combinedlolzcat3454Pas encore d'évaluation
- Computer Science Project On Management SystemDocument26 pagesComputer Science Project On Management Systemsajid aliPas encore d'évaluation
- Amit Udgirkar PRAJ PDFDocument38 pagesAmit Udgirkar PRAJ PDFjpsingh75Pas encore d'évaluation
- Effect of Restraint, Volume Change, and Reinforcement On Cracking of Mass ConcreteDocument26 pagesEffect of Restraint, Volume Change, and Reinforcement On Cracking of Mass ConcreteDIDIER ANGEL LOPEZ RINCONPas encore d'évaluation
- UCE802 Earthquake SyllabusDocument2 pagesUCE802 Earthquake Syllabuskullu88Pas encore d'évaluation
- 3dsmax2013 PU06 Readme0Document6 pages3dsmax2013 PU06 Readme0Divad Zoñum CostaPas encore d'évaluation
- LEMBARAN KERJA BI TAHUN 4 (m7-10) PDPRDocument9 pagesLEMBARAN KERJA BI TAHUN 4 (m7-10) PDPRnurulwaznahPas encore d'évaluation
- Unisonic Technologies Co., LTD: 8-Channel Analog Multiplexers/DemultiplexersDocument7 pagesUnisonic Technologies Co., LTD: 8-Channel Analog Multiplexers/DemultiplexersNaresh KsPas encore d'évaluation
- Angle Style, Pressure Relief Valves For Steam, Gas, and Liquid ServicesDocument14 pagesAngle Style, Pressure Relief Valves For Steam, Gas, and Liquid ServicesCHRISTIAN ZAVALAPas encore d'évaluation
- John Deere 772d 6wd GraderDocument6 pagesJohn Deere 772d 6wd GraderyaserattiaPas encore d'évaluation
- 1) Computer Concepts NotesDocument6 pages1) Computer Concepts NotesVenus Leilani Villanueva-Granado100% (2)
- Mathematical Investigation of Trigonometric FunctionsDocument12 pagesMathematical Investigation of Trigonometric FunctionsFirasco100% (13)
- Carbolite CWF1313 004 - 3216Document44 pagesCarbolite CWF1313 004 - 3216dev-nullPas encore d'évaluation






































![U.S. Marines In Battle: Al-Qaim, September 2005-March 2006 [Illustrated Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/259899129/149x198/e678da9b6e/1617227775?v=1)













































































