Vous aimerez peut-être aussi
- Alternator and Starter Motor TestingDocument4 pagesAlternator and Starter Motor TestingM. ShaatPas encore d'évaluation
- Understanding DPF Regeneration for 2007-2009 Isuzu Diesel EnginesDocument41 pagesUnderstanding DPF Regeneration for 2007-2009 Isuzu Diesel EnginesBibart Mihaela100% (1)
- MM 36Document23 pagesMM 36renganathan21051990Pas encore d'évaluation
- G50 and G55 Manual Transmissions: DescriptionDocument7 pagesG50 and G55 Manual Transmissions: DescriptionCarlos Machado100% (1)
- Diesel Smoke - WOF Failure?: Home Specials Products Services Events Gallery ContactDocument2 pagesDiesel Smoke - WOF Failure?: Home Specials Products Services Events Gallery Contactben razPas encore d'évaluation
- Navigo N165S User ManualDocument5 pagesNavigo N165S User ManualkujkojaPas encore d'évaluation
- Fluid Tech-Info enDocument17 pagesFluid Tech-Info enadhityaPas encore d'évaluation
- Fuel Injectors - and Further MoreDocument4 pagesFuel Injectors - and Further MoreFabricio LimaPas encore d'évaluation
- Automotive Transmission: Be Skilled Be SmartDocument55 pagesAutomotive Transmission: Be Skilled Be SmartgvnagamaniPas encore d'évaluation
- Mechanic Diesel: Syllabus of Semester SystemDocument28 pagesMechanic Diesel: Syllabus of Semester Systempradeep100% (1)
- Tech Doc Def Iso22241 Jul2022Document1 pageTech Doc Def Iso22241 Jul2022Wael MohammedPas encore d'évaluation
- Service HandoutDocument59 pagesService HandoutTapas Banerjee100% (2)
- GO-KART (XYKD260) Repair Manual: Downloaded From Manuals Search EngineDocument49 pagesGO-KART (XYKD260) Repair Manual: Downloaded From Manuals Search EnginemichelmolinePas encore d'évaluation
- Workshop Manual Octavia Automatic Gearbox Edition 0896 s0051165020Document208 pagesWorkshop Manual Octavia Automatic Gearbox Edition 0896 s0051165020Zafer IlhanPas encore d'évaluation
- Trucks +trailers+&+busses 2012-2013 PDFDocument484 pagesTrucks +trailers+&+busses 2012-2013 PDFTamer MoustafaPas encore d'évaluation
- Diesel – A Clean and Efficient Fuel Achieving BSVI Emission StandardsDocument25 pagesDiesel – A Clean and Efficient Fuel Achieving BSVI Emission StandardsPragg AggarwalPas encore d'évaluation
- Foundation LayoutDocument1 pageFoundation LayoutrendaninPas encore d'évaluation
- KS Damage To Engine Bearings - 861097Document72 pagesKS Damage To Engine Bearings - 861097gume pesa50% (2)
- Autocad NotesDocument53 pagesAutocad Notesadnan100% (7)
- Pressure Vessel Rivets Welded Joints MDSP PrimeDocument16 pagesPressure Vessel Rivets Welded Joints MDSP PrimeIvanPas encore d'évaluation
- Common Rail Fuel Injection Technology in Diesel EnginesD'EverandCommon Rail Fuel Injection Technology in Diesel EnginesPas encore d'évaluation
- Automatic Lubrication SystemDocument4 pagesAutomatic Lubrication SystembalabooksPas encore d'évaluation
- False Ceiling Construction Details PDFDocument2 pagesFalse Ceiling Construction Details PDFAlexis17% (6)
- Unit 6Document13 pagesUnit 6VeronicaPas encore d'évaluation
- Welding PositionDocument30 pagesWelding PositionTuah Negeri100% (1)
- Which Cars Are Equipped With k9k 808. Engines and Weaknesses of The K9K EngineDocument19 pagesWhich Cars Are Equipped With k9k 808. Engines and Weaknesses of The K9K EngineShalla Balla100% (1)
- Catalogo Rectifier Jumper Diode PDFDocument82 pagesCatalogo Rectifier Jumper Diode PDFionixelectronicsPas encore d'évaluation
- Pull Test Procedure - Chile Cabildo & Villa Seca 3MW-SkyLineDocument7 pagesPull Test Procedure - Chile Cabildo & Villa Seca 3MW-SkyLinecnuneza4Pas encore d'évaluation
- Exide TechGuide 2017 Ed3-GB Web PDFDocument48 pagesExide TechGuide 2017 Ed3-GB Web PDFKarthiPas encore d'évaluation
- Engine Mechanical 1 Textbook EVDocument76 pagesEngine Mechanical 1 Textbook EVmi5a.saad12345Pas encore d'évaluation
- 4WD System Specs & Service GuideDocument35 pages4WD System Specs & Service GuideZM OhnPas encore d'évaluation
- Racor Catalogo 2017Document24 pagesRacor Catalogo 2017j_hernandez_chPas encore d'évaluation
- DSG Clutch Replacement GuideDocument16 pagesDSG Clutch Replacement GuideDawid SierockiPas encore d'évaluation
- Mahle Pistons TroubleshootingDocument84 pagesMahle Pistons Troubleshootingxristina100% (1)
- 3 Tyre Types 160217043028Document23 pages3 Tyre Types 160217043028kl42c4300Pas encore d'évaluation
- Automotive Horn System CompleteDocument6 pagesAutomotive Horn System CompleteTaha Kassala100% (1)
- Get Charged Up For Electrical Change: The Three Charging StrategiesDocument1 pageGet Charged Up For Electrical Change: The Three Charging StrategiesRohit YadavPas encore d'évaluation
- Introduction To Enhanced I/M: Vehicle Maintenance and Clean AirDocument10 pagesIntroduction To Enhanced I/M: Vehicle Maintenance and Clean AirjasbirpaulPas encore d'évaluation
- Gasoline Direct InjectionDocument21 pagesGasoline Direct InjectionVinit KumarPas encore d'évaluation
- 3FE Desmog GuideDocument13 pages3FE Desmog GuideKevinPas encore d'évaluation
- 24 Volt ManualDocument13 pages24 Volt ManualCirilo JuniorPas encore d'évaluation
- RadiatorsDocument12 pagesRadiatorsMiljkovic NesaPas encore d'évaluation
- 9 Springs PDFDocument40 pages9 Springs PDFViven SharmaPas encore d'évaluation
- 02 - Power BalancingDocument8 pages02 - Power Balancingveer sainPas encore d'évaluation
- GDI Engines VolkswagonDocument9 pagesGDI Engines VolkswagonNikhil KattiPas encore d'évaluation
- NPR 2013noacatalogforprintoutDocument596 pagesNPR 2013noacatalogforprintoutSelvaraji MuthuPas encore d'évaluation
- Sistem PengapianDocument16 pagesSistem PengapianArdianto BahtiarPas encore d'évaluation
- Cargador Frontal Cat 914GDocument28 pagesCargador Frontal Cat 914GHuayta Apaza Jacinto100% (1)
- Wheel Alignment SpecificationsDocument15 pagesWheel Alignment SpecificationsBAla0% (1)
- Govt - Poly Technic College Perinthalmanna: Sreenivas.U.P MS5Document17 pagesGovt - Poly Technic College Perinthalmanna: Sreenivas.U.P MS5Kkbhuvan KkPas encore d'évaluation
- CH 08 - Four-Wheel-Drive SystemsDocument36 pagesCH 08 - Four-Wheel-Drive SystemsRevanth BhattaramPas encore d'évaluation
- Calibracion de Motores Cummins 1Document2 pagesCalibracion de Motores Cummins 1josePas encore d'évaluation
- Daewoo Matiz 2000-2013 Wheel AlignmentDocument6 pagesDaewoo Matiz 2000-2013 Wheel AlignmentOMARPas encore d'évaluation
- BS32SS CarbsDocument14 pagesBS32SS CarbslfrankhoPas encore d'évaluation
- Wilson Gear BoxDocument20 pagesWilson Gear Boxsonirocks100% (1)
- Engine BasicDocument74 pagesEngine BasicMohan Preeth100% (1)
- Engine Oil SpecsDocument9 pagesEngine Oil SpecsWan ZahirPas encore d'évaluation
- VCR Engine ControlDocument71 pagesVCR Engine Controlvlad_paladePas encore d'évaluation
- Mean Value Engine Model of Heavy Duty Diesel EngineDocument34 pagesMean Value Engine Model of Heavy Duty Diesel EngineMuhidin ArifinPas encore d'évaluation
- 6129 Danninger Alois 2017Document161 pages6129 Danninger Alois 2017greffeuille julienPas encore d'évaluation
- Intake Mnaifold ModellingDocument60 pagesIntake Mnaifold ModellingDaniel GorettiPas encore d'évaluation
- Modeling of A Diesel Engine With VGT and EGR Including Oxygen Mass FractionDocument45 pagesModeling of A Diesel Engine With VGT and EGR Including Oxygen Mass FractionVishwanathanPulugandiPas encore d'évaluation
- MSC Thesis MarioCalado 12outubro2012 PDFDocument122 pagesMSC Thesis MarioCalado 12outubro2012 PDFKami JaraPas encore d'évaluation
- Model Based HCCI Engine Combustion Control: Mikael LundströmDocument64 pagesModel Based HCCI Engine Combustion Control: Mikael LundströmKarthik NagarajPas encore d'évaluation
- Full Text 01Document107 pagesFull Text 01jumuper40.07Pas encore d'évaluation
- Titanium Engine PistonDocument61 pagesTitanium Engine PistonSrikanth KopPas encore d'évaluation
- On Stability and Surge in Turbocharger CompressorsDocument119 pagesOn Stability and Surge in Turbocharger CompressorsmuratPas encore d'évaluation
- Ddr2f34 Sqa Unit SpecDocument9 pagesDdr2f34 Sqa Unit SpecMullah FassudinPas encore d'évaluation
- Progress Report 4Document10 pagesProgress Report 4Mullah FassudinPas encore d'évaluation
- Remote Citrix Access For Students v2.0Document3 pagesRemote Citrix Access For Students v2.0Mullah FassudinPas encore d'évaluation
- HNC Shipbuilding Award GuideDocument27 pagesHNC Shipbuilding Award GuideMullah FassudinPas encore d'évaluation
- CALM PowerPoint Template 2015Document8 pagesCALM PowerPoint Template 2015Mullah FassudinPas encore d'évaluation
- Watchkeeping GuidanceDocument73 pagesWatchkeeping GuidanceMullah FassudinPas encore d'évaluation
- Recruitment and Admissions ModuleDocument76 pagesRecruitment and Admissions ModuleMullah FassudinPas encore d'évaluation
- CoG - Presentation-Women in EngineeringDocument15 pagesCoG - Presentation-Women in EngineeringMullah FassudinPas encore d'évaluation
- Higher Waiting ListDocument3 pagesHigher Waiting ListMullah FassudinPas encore d'évaluation
- 1121 - Associate Dean Nautical ScienceDocument8 pages1121 - Associate Dean Nautical ScienceMullah FassudinPas encore d'évaluation
- Chief Engineer (Yacht)Document1 pageChief Engineer (Yacht)Mullah FassudinPas encore d'évaluation
- Brief Overview Generator Free Ebook Part1 FinalDocument44 pagesBrief Overview Generator Free Ebook Part1 FinalSushant SinghPas encore d'évaluation
- Min - 565 McaDocument6 pagesMin - 565 McaMullah FassudinPas encore d'évaluation
- Document CoGCDocument20 pagesDocument CoGCMullah FassudinPas encore d'évaluation
- Bursting of Starting Air Compressor: No. 1/99 Edited by DTP-245 Ship Type: Size (GRT) : Built YearDocument1 pageBursting of Starting Air Compressor: No. 1/99 Edited by DTP-245 Ship Type: Size (GRT) : Built YearMullah FassudinPas encore d'évaluation
- DN3X 35 Electrical GU2 Project MilestonesDocument5 pagesDN3X 35 Electrical GU2 Project MilestonesMullah FassudinPas encore d'évaluation
- Hydraulic Fluid 3 DocumentsDocument45 pagesHydraulic Fluid 3 DocumentsMullah FassudinPas encore d'évaluation
- DG2V 35 Electronics Graded Unit 2Document75 pagesDG2V 35 Electronics Graded Unit 2Mullah FassudinPas encore d'évaluation
- DG2V 35 Electronics Graded Unit 2Document75 pagesDG2V 35 Electronics Graded Unit 2Mullah FassudinPas encore d'évaluation
- Brief Overview Generator Free Ebook Part1 FinalDocument44 pagesBrief Overview Generator Free Ebook Part1 FinalSushant SinghPas encore d'évaluation
- Hydraulic Fluid Purpose & PropertiesDocument36 pagesHydraulic Fluid Purpose & PropertiesMullah FassudinPas encore d'évaluation
- Mitigating Circumstances Application Form 2016Document3 pagesMitigating Circumstances Application Form 2016Mullah FassudinPas encore d'évaluation
- Brief Overview Generator Free Ebook Part1 FinalDocument44 pagesBrief Overview Generator Free Ebook Part1 FinalSushant SinghPas encore d'évaluation
- Brochure LNG Shipping Solutions DNVGLDocument8 pagesBrochure LNG Shipping Solutions DNVGLMullah Fassudin100% (1)
- Course Work1Document6 pagesCourse Work1Mullah FassudinPas encore d'évaluation
- Workshop Guide To The Various MachinesDocument27 pagesWorkshop Guide To The Various MachinesMullah FassudinPas encore d'évaluation
- Manual Fuel Pump ControlDocument1 pageManual Fuel Pump ControlMullah FassudinPas encore d'évaluation
- EFQM 16march16 Final After CorrectionDocument66 pagesEFQM 16march16 Final After CorrectionMullah FassudinPas encore d'évaluation
- F914 34 Marine Engineering Graded Unit 1Document10 pagesF914 34 Marine Engineering Graded Unit 1Mullah FassudinPas encore d'évaluation
- Account Manager Business Development in San Jose CA Resume Mark WestonDocument2 pagesAccount Manager Business Development in San Jose CA Resume Mark WestonMarkWeston2Pas encore d'évaluation
- List of Linkages2016Document74 pagesList of Linkages2016engrwho0% (1)
- Ice-Lined Refrigerator ManualDocument8 pagesIce-Lined Refrigerator ManualEmilioPerezBallesterosPas encore d'évaluation
- Roebuck 1942Document12 pagesRoebuck 1942Imam Saja DechPas encore d'évaluation
- SportOptics 2014-2015Document31 pagesSportOptics 2014-2015ivaldeztPas encore d'évaluation
- Murray Loop Test To Locate Ground Fault PDFDocument2 pagesMurray Loop Test To Locate Ground Fault PDFmohdPas encore d'évaluation
- Strength of Pressure Vessels With Ellipsoidal HeadsDocument8 pagesStrength of Pressure Vessels With Ellipsoidal Headsنصرالدين ادريسPas encore d'évaluation
- Memory Map and Address DecodingDocument9 pagesMemory Map and Address DecodingGhozi AlPas encore d'évaluation
- Cassette toilet spare parts guide for models C2, C3 and C4Document21 pagesCassette toilet spare parts guide for models C2, C3 and C4georgedragosPas encore d'évaluation
- Stokes' theorem simplifies integration of differential formsDocument6 pagesStokes' theorem simplifies integration of differential formssiriusgrPas encore d'évaluation
- FAA Significant Regulatory DifferencesDocument3 pagesFAA Significant Regulatory DifferencesOpteron K.Pas encore d'évaluation
- BPCL Kochi Refinery MS BLOCK PROJECT Piping Material SpecificationDocument1 pageBPCL Kochi Refinery MS BLOCK PROJECT Piping Material SpecificationDeepak DayalPas encore d'évaluation
- 050, 051Document28 pages050, 051kefaja67% (3)
- The Tallest Buildings in The WorldDocument2 pagesThe Tallest Buildings in The WorldW4G8989Pas encore d'évaluation
- Grounding Vs BondingDocument2 pagesGrounding Vs BondingVictor HutahaeanPas encore d'évaluation
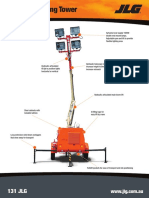
- JLG Lighting Tower 6308AN Series II 20150907Document2 pagesJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Pas encore d'évaluation
- GENG 8000 Final Project Memo - W19 FinalDocument2 pagesGENG 8000 Final Project Memo - W19 Finalஇலக்கியா ராஜாPas encore d'évaluation
- Structural Systems Engineering GuideDocument67 pagesStructural Systems Engineering Guidejucar fernandezPas encore d'évaluation
- Technical Presentation - Arik Ethan Kinajil (25231)Document5 pagesTechnical Presentation - Arik Ethan Kinajil (25231)Arik EthanPas encore d'évaluation
- Ornl 2465Document101 pagesOrnl 2465jesusPas encore d'évaluation
- 01chapter 5-1Document55 pages01chapter 5-1AhmPas encore d'évaluation
- STP GuideDocument2 pagesSTP GuideFlow Dynamics IndiaPas encore d'évaluation
- Support Orca3D HelpDocument281 pagesSupport Orca3D Helplavrik100% (1)
- 8 Ways To Achieve Efficient Combustion in Marine EnginesDocument10 pages8 Ways To Achieve Efficient Combustion in Marine EnginestomPas encore d'évaluation