Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Trend Graphs - Sample AnswerDocument4 pagesTrend Graphs - Sample AnswerannieannsPas encore d'évaluation
- Boat DesignDocument8 pagesBoat DesignporkovanPas encore d'évaluation
- Lease of Residential HouseDocument4 pagesLease of Residential HousedenvergamlosenPas encore d'évaluation
- Parameters of Periodic Wave Forms - GATE Study Material in PDFDocument5 pagesParameters of Periodic Wave Forms - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Sinusoidal Response of Series Circuits - GATE Study Material in PDFDocument9 pagesSinusoidal Response of Series Circuits - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Magnetic Coupled Circuits - GATE Study Material in PDFDocument10 pagesMagnetic Coupled Circuits - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Duality of Networks - GATE Study Material in PDFDocument7 pagesDuality of Networks - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Network Transients 3 - GATE Study Material in PDFDocument10 pagesNetwork Transients 3 - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Network Transients 2 - GATE Study Material in PDFDocument6 pagesNetwork Transients 2 - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- KCL and KVL in Electrical Networks - GATE Study Material in PDFDocument5 pagesKCL and KVL in Electrical Networks - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Thevenin, Norton and Tellegen Theorems - GATE Study Material in PDFDocument10 pagesThevenin, Norton and Tellegen Theorems - GATE Study Material in PDFAtul Choudhary100% (1)
- Network Transients 3 - GATE Study Material in PDFDocument10 pagesNetwork Transients 3 - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Kirchhoffs Laws, Node and Mesh Analysis - GATE Study Material in PDFDocument10 pagesKirchhoffs Laws, Node and Mesh Analysis - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Voltage and Current Division, Star To Delta Conversion - GATE Study Material in PDFDocument9 pagesVoltage and Current Division, Star To Delta Conversion - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Signal Flow Graph - GATE Study Material in PDFDocument5 pagesSignal Flow Graph - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Time Response of Second Order Systems - GATE Study Material in PDFDocument5 pagesTime Response of Second Order Systems - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Root Locus Diagram - GATE Study Material in PDFDocument7 pagesRoot Locus Diagram - GATE Study Material in PDFAtul Choudhary100% (1)
- SSC CGL Tier II Study Schedule PDFDocument5 pagesSSC CGL Tier II Study Schedule PDFAtul ChoudharyPas encore d'évaluation
- Frequency Response For Control System Analysis - GATE Study Material in PDFDocument7 pagesFrequency Response For Control System Analysis - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Nyquist Plot and Stability Criteria - GATE Study Material in PDFDocument7 pagesNyquist Plot and Stability Criteria - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- Compensators - GATE Study Material in PDFDocument10 pagesCompensators - GATE Study Material in PDFAtul ChoudharyPas encore d'évaluation
- EHT For Athletes For Brain HealthDocument2 pagesEHT For Athletes For Brain HealthTracey Jorg RollisonPas encore d'évaluation
- Mumbai Tourist Attractions.Document2 pagesMumbai Tourist Attractions.Guru SanPas encore d'évaluation
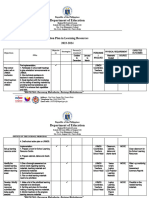
- aCTION PLAN IN HEALTHDocument13 pagesaCTION PLAN IN HEALTHCATHERINE FAJARDOPas encore d'évaluation
- Ajwin Handbuch enDocument84 pagesAjwin Handbuch enEnzo AguilarPas encore d'évaluation
- Antarctica Can Give A MonopolyDocument6 pagesAntarctica Can Give A MonopolyFilip DukicPas encore d'évaluation
- 4mb1 02r Que 20220608Document32 pages4mb1 02r Que 20220608M.A. HassanPas encore d'évaluation
- Case NoDocument13 pagesCase NoLaurente JessicaPas encore d'évaluation
- Candida by Shaw, George Bernard, 1856-1950Document61 pagesCandida by Shaw, George Bernard, 1856-1950Gutenberg.orgPas encore d'évaluation
- Crio - Copy Business Operations - Case Study AssignmentDocument3 pagesCrio - Copy Business Operations - Case Study Assignmentvaishnawnikhil3Pas encore d'évaluation
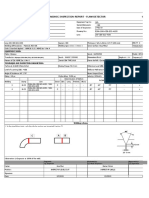
- Ut ProcedureDocument2 pagesUt ProcedureJJ WeldingPas encore d'évaluation
- Subtracting-Fractions-Unlike DenominatorsDocument2 pagesSubtracting-Fractions-Unlike Denominatorsapi-3953531900% (1)
- Alarm Management Second Ed - Hollifield Habibi - IntroductionDocument6 pagesAlarm Management Second Ed - Hollifield Habibi - IntroductionDavid DuranPas encore d'évaluation
- Nozzle F Factor CalculationsDocument5 pagesNozzle F Factor CalculationsSivateja NallamothuPas encore d'évaluation
- Rozgar Sutra EnglishDocument105 pagesRozgar Sutra EnglishRisingsun PradhanPas encore d'évaluation
- MCS Adopts Milyli Software Redaction Tool BlackoutDocument3 pagesMCS Adopts Milyli Software Redaction Tool BlackoutPR.comPas encore d'évaluation
- Me2404 Set1Document16 pagesMe2404 Set1sakthivelsvsPas encore d'évaluation
- Instruction Manual PC Interface RSM 100: TOSHIBA Corporation 1999 All Rights ReservedDocument173 pagesInstruction Manual PC Interface RSM 100: TOSHIBA Corporation 1999 All Rights ReservedFarid HakikiPas encore d'évaluation
- Making An Appointment PaperDocument12 pagesMaking An Appointment PaperNabila PramestiPas encore d'évaluation
- Hics 203-Organization Assignment ListDocument2 pagesHics 203-Organization Assignment ListslusafPas encore d'évaluation
- Lab 1 Boys CalorimeterDocument11 pagesLab 1 Boys CalorimeterHafizszul Feyzul100% (1)
- 3 5 3Document4 pages3 5 3Amr Mohamed RedaPas encore d'évaluation
- Future War in Cities Alice Hills PDFDocument5 pagesFuture War in Cities Alice Hills PDFazardarioPas encore d'évaluation
- Degrees of Comparison: When We Compare Two Nouns: Comparative. When We Compare Three or More Nouns: SuperlativeDocument6 pagesDegrees of Comparison: When We Compare Two Nouns: Comparative. When We Compare Three or More Nouns: SuperlativeMerlina AryantiPas encore d'évaluation
- 2018 JC2 H2 Maths SA2 River Valley High SchoolDocument50 pages2018 JC2 H2 Maths SA2 River Valley High SchoolZtolenstarPas encore d'évaluation
- Ted Hughes's Crow - An Alternative Theological ParadigmDocument16 pagesTed Hughes's Crow - An Alternative Theological Paradigmsa46851Pas encore d'évaluation
- Procedure For NC and CapaDocument2 pagesProcedure For NC and CapaSAKTHIVEL APas encore d'évaluation
- Reasons for Conducting Qualitative ResearchDocument12 pagesReasons for Conducting Qualitative ResearchMa. Rhona Faye MedesPas encore d'évaluation