Vous aimerez peut-être aussi
- Power Quality in The Hybrid Grid PV-Wind-Battery by The Multi-Input Transformer-Coupled Bidirectional DC-DC ConverterDocument13 pagesPower Quality in The Hybrid Grid PV-Wind-Battery by The Multi-Input Transformer-Coupled Bidirectional DC-DC ConverterIJRASETPublicationsPas encore d'évaluation
- GS381ijatesDocument9 pagesGS381ijatesSHARJEEL MUNAWARPas encore d'évaluation
- Hybrid Power Generation Using Back To Back Voltage Source ConvertersDocument9 pagesHybrid Power Generation Using Back To Back Voltage Source ConvertersGreenCornerTech NlrPas encore d'évaluation
- Grid-Connected Wind-PhotovoltaicDocument70 pagesGrid-Connected Wind-PhotovoltaicGreenCornerTech Nlr100% (1)
- Role of Power Electronics in Renewable Energy Resources: Research ProposalDocument6 pagesRole of Power Electronics in Renewable Energy Resources: Research ProposalAyesha MughalPas encore d'évaluation
- 8th Batch Project PresentatioDocument30 pages8th Batch Project PresentatioThulasi PrasadPas encore d'évaluation
- A QUASI-Z-SOURCE Converter Using A Single-Stage Switched-Inductor Boost DC-DC ConverterDocument14 pagesA QUASI-Z-SOURCE Converter Using A Single-Stage Switched-Inductor Boost DC-DC ConverterIJRASETPublicationsPas encore d'évaluation
- Optimal Sizing of Hybrid Wind/PV Plant for Power GridDocument9 pagesOptimal Sizing of Hybrid Wind/PV Plant for Power Gridawhan0% (1)
- Grid-Connected Wind-Solar Cogeneration UsingDocument11 pagesGrid-Connected Wind-Solar Cogeneration UsingLE-225 Moulali ShaikPas encore d'évaluation
- Virtual Inertia Adaptive Control of A Doubly Fed IDocument16 pagesVirtual Inertia Adaptive Control of A Doubly Fed IMekonnen ShewaregaPas encore d'évaluation
- RevieDocument10 pagesRevieAnet JosePas encore d'évaluation
- Energies: FPGA-Based Controller For A Hybrid Grid-Connected PV/Wind/Battery Power System With AC LoadDocument17 pagesEnergies: FPGA-Based Controller For A Hybrid Grid-Connected PV/Wind/Battery Power System With AC LoadmohanPas encore d'évaluation
- Eai 7-9-2021 2314947Document16 pagesEai 7-9-2021 2314947rida.hamza.muhammadPas encore d'évaluation
- Control and Grid Integration of MW-Scale Wind and Solar SystemsDocument5 pagesControl and Grid Integration of MW-Scale Wind and Solar SystemsProfil FaksPas encore d'évaluation
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyDocument8 pagesSupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyMelissa MillerPas encore d'évaluation
- Analysis of Various Power Quality Issues of Wind Solar System - A ReviewDocument7 pagesAnalysis of Various Power Quality Issues of Wind Solar System - A ReviewEditor IJTSRDPas encore d'évaluation
- +design and Implementation of A Low CostDocument9 pages+design and Implementation of A Low CostmabhatPas encore d'évaluation
- Ijirt Paper 2Document5 pagesIjirt Paper 2dineshkumarPas encore d'évaluation
- Modeling of Wind Turbines Based On DFIGDocument8 pagesModeling of Wind Turbines Based On DFIGAida AdylbekovaPas encore d'évaluation
- A Novel Single-Stage Single-Phase Reconfigurable Inverter Topology For A Solar Powered Hybrid AC/DC HomeDocument9 pagesA Novel Single-Stage Single-Phase Reconfigurable Inverter Topology For A Solar Powered Hybrid AC/DC HomeTANVIR MAHMUD MAHIMPas encore d'évaluation
- ProjectDocument34 pagesProjectThulasi PrasadPas encore d'évaluation
- Maximizing Power from Renewable SourcesDocument6 pagesMaximizing Power from Renewable SourcesyoussefPas encore d'évaluation
- PV-Vortex Blade-Less Wind Hybrid System Based Cuckoo Search Maximum Power Point Tracking AlgorithmDocument8 pagesPV-Vortex Blade-Less Wind Hybrid System Based Cuckoo Search Maximum Power Point Tracking Algorithm13.ธนดล กองธรรมPas encore d'évaluation
- Blaabjerg, F. Teodorescu, R. Liserre, M. Timbus, A.V. - Overview of Control and Grid Synchronization For DistributDocument12 pagesBlaabjerg, F. Teodorescu, R. Liserre, M. Timbus, A.V. - Overview of Control and Grid Synchronization For DistributPhạm Văn TưởngPas encore d'évaluation
- Red DEv and Tripathi Journal PaperDocument10 pagesRed DEv and Tripathi Journal PaperMichael Zontche BernardPas encore d'évaluation
- 37_PerformanceDocument9 pages37_PerformanceSujit KumarPas encore d'évaluation
- (IEEE 2015 IEEE Industry Applications Society Annual Meeting - Addison, TX, USA (2015.10.18-2015.10.22) ) 2015 IEEEDocument8 pages(IEEE 2015 IEEE Industry Applications Society Annual Meeting - Addison, TX, USA (2015.10.18-2015.10.22) ) 2015 IEEEjohnsonPas encore d'évaluation
- 3 A Systematic PVQV Curves WaleedDocument6 pages3 A Systematic PVQV Curves Waleedwalid khanPas encore d'évaluation
- Design and Control of Microgrid Fed by RenewableDocument10 pagesDesign and Control of Microgrid Fed by RenewablestarboyPas encore d'évaluation
- Wind Turbine Transient Stability Improvement in Power System UsingDocument6 pagesWind Turbine Transient Stability Improvement in Power System Usingrasim_m1146Pas encore d'évaluation
- Power Electronics As Efficient Interface in Dispersed Power Generation SystemsDocument11 pagesPower Electronics As Efficient Interface in Dispersed Power Generation SystemsnmotanPas encore d'évaluation
- Review Paper - 2 - 1Document6 pagesReview Paper - 2 - 1iaset123Pas encore d'évaluation
- Dynamic Modeling and Operation Strategy For A Microgrid With Wind and Photovoltaic ResourcesDocument10 pagesDynamic Modeling and Operation Strategy For A Microgrid With Wind and Photovoltaic Resourcesvinay dawarPas encore d'évaluation
- Modeling and Power Management of a Remote Stand Alone PV-Wind Hybrid SystemDocument13 pagesModeling and Power Management of a Remote Stand Alone PV-Wind Hybrid Systemteju2812Pas encore d'évaluation
- 36 PVplant Modeling GorganDocument7 pages36 PVplant Modeling Gorganvinsen letsoinPas encore d'évaluation
- Report ProjectDocument17 pagesReport ProjectMAGUDESWARAN PPas encore d'évaluation
- Modeling and Simulation of The AnticipatDocument17 pagesModeling and Simulation of The Anticipatanibal espinozaPas encore d'évaluation
- Research On Renewable Energy Power Generation CompDocument7 pagesResearch On Renewable Energy Power Generation CompnbackupgPas encore d'évaluation
- Research PaperDocument8 pagesResearch PaperkingPas encore d'évaluation
- Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter For Household ApplicationsDocument4 pagesGrid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter For Household ApplicationsIJRASETPublicationsPas encore d'évaluation
- Bailu Xiao MLIDocument10 pagesBailu Xiao MLIعبدالله نعمان آلزبيديPas encore d'évaluation
- Enhancement of PQ in Grid Connected PV System Using Hybrid TechniqueDocument13 pagesEnhancement of PQ in Grid Connected PV System Using Hybrid Techniquetonimur1967Pas encore d'évaluation
- A Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesDocument11 pagesA Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesBHARADWAJ CHIVUKULAPas encore d'évaluation
- Ieee Paper FormatDocument6 pagesIeee Paper FormatJabir SijasPas encore d'évaluation
- Id Connected PV Wind Battery Based Multi InputDocument3 pagesId Connected PV Wind Battery Based Multi InputPidikiti Surendra BabuPas encore d'évaluation
- A Review of Hybrid Solar PV and Wind Energy SystemDocument12 pagesA Review of Hybrid Solar PV and Wind Energy SystemTato LeonPas encore d'évaluation
- Bi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsDocument8 pagesBi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsJitender KaushalPas encore d'évaluation
- 06344689Document8 pages06344689Hypnotic KnightPas encore d'évaluation
- An Improved DC-DC Boost Converter For Energy HarveDocument10 pagesAn Improved DC-DC Boost Converter For Energy HarveTuấn Nguyễn VănPas encore d'évaluation
- Power Management of A Stand-Alone Wind/Photovoltaic/Fuel Cell Energy SystemDocument11 pagesPower Management of A Stand-Alone Wind/Photovoltaic/Fuel Cell Energy SystemAzza AhmedPas encore d'évaluation
- Kaliamoorthy2015 PDFDocument10 pagesKaliamoorthy2015 PDFkhalidPas encore d'évaluation
- An Assessment of The Impact of Wind Generation On Frequency ControlDocument9 pagesAn Assessment of The Impact of Wind Generation On Frequency ControlNadil AminPas encore d'évaluation
- Modeling and Analysis of A DC Electrical System and Controllers For Implementation of A Grid-Interactive BuildingDocument21 pagesModeling and Analysis of A DC Electrical System and Controllers For Implementation of A Grid-Interactive Buildingsurisetti amruthaPas encore d'évaluation
- Improving Dynamic Performance of Wind Energy Conversion Systems Using Fuzzy-Based Hysteresis Current-Controlled Superconducting Magnetic Energy StorageDocument10 pagesImproving Dynamic Performance of Wind Energy Conversion Systems Using Fuzzy-Based Hysteresis Current-Controlled Superconducting Magnetic Energy StorageNch NMPas encore d'évaluation
- 2021 - Measurement Method of Inertia Constant of Power System Based On...Document10 pages2021 - Measurement Method of Inertia Constant of Power System Based On...jairrdz847Pas encore d'évaluation
- Model and Design For The Control of Hybrid Domestic Power SystemDocument8 pagesModel and Design For The Control of Hybrid Domestic Power SystemfazalPas encore d'évaluation
- Distributed Power Resources: Operation and Control of Connecting to the GridD'EverandDistributed Power Resources: Operation and Control of Connecting to the GridPas encore d'évaluation
- Grid Connected Converters: Modeling, Stability and ControlD'EverandGrid Connected Converters: Modeling, Stability and ControlPas encore d'évaluation
- Multiple Nutrient Deficiency Detection in Paddy Leaf Images Using Color and Pattern AnalysisDocument4 pagesMultiple Nutrient Deficiency Detection in Paddy Leaf Images Using Color and Pattern Analysisniranjan_meharPas encore d'évaluation
- InitiateSingleEntryPaymentSummary17 06 2017 PDFDocument1 pageInitiateSingleEntryPaymentSummary17 06 2017 PDFniranjan_meharPas encore d'évaluation
- RLS Algorithm Adaptive FilterDocument15 pagesRLS Algorithm Adaptive Filterniranjan_meharPas encore d'évaluation
- Example16 SIMULINK PDFDocument11 pagesExample16 SIMULINK PDFgomgomPas encore d'évaluation
- NSS 3-Reliable Low-Power Multiplier PDFDocument10 pagesNSS 3-Reliable Low-Power Multiplier PDFThahsin ThahirPas encore d'évaluation
- 09 Chapter4Document23 pages09 Chapter4niranjan_meharPas encore d'évaluation
- Multiple Nutrient Deficiency Detection in Paddy Leaf Images Using Color and Pattern AnalysisDocument4 pagesMultiple Nutrient Deficiency Detection in Paddy Leaf Images Using Color and Pattern Analysisniranjan_meharPas encore d'évaluation
- Original Image To Be SelectedDocument5 pagesOriginal Image To Be Selectedniranjan_meharPas encore d'évaluation
- Without Applying Induction Motor Voltage SagDocument4 pagesWithout Applying Induction Motor Voltage Sagniranjan_meharPas encore d'évaluation
- No ThanksDocument5 pagesNo Thanksniranjan_meharPas encore d'évaluation
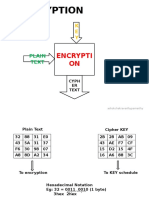
- Aes Encryption: Encrypti ONDocument12 pagesAes Encryption: Encrypti ONniranjan_meharPas encore d'évaluation
- Simulationlab EE0405 PDFDocument78 pagesSimulationlab EE0405 PDFDhondiram KakrePas encore d'évaluation
- 05676476Document8 pages05676476niranjan_meharPas encore d'évaluation
- Physical stock variances and expired goods issues noted in store auditDocument4 pagesPhysical stock variances and expired goods issues noted in store auditniranjan_meharPas encore d'évaluation
- Detailed Project Report Solar PVDocument19 pagesDetailed Project Report Solar PVbakoolk100% (3)
- RasdfsDocument39 pagesRasdfsKeyur GajjarPas encore d'évaluation
- Admission Schedule 201401132015Document2 pagesAdmission Schedule 201401132015niranjan_meharPas encore d'évaluation
- Mysteries of The Sacred Universe - An OverviewDocument11 pagesMysteries of The Sacred Universe - An Overviewniranjan_mehar100% (2)
- Sri Yantra A DESTINEYDocument14 pagesSri Yantra A DESTINEYsssmouPas encore d'évaluation
- Research Activities Published Paper ICPS04Document6 pagesResearch Activities Published Paper ICPS04Luiza DraghiciPas encore d'évaluation
- PTC Corporate Presentation-30!09!2012Document25 pagesPTC Corporate Presentation-30!09!2012niranjan_meharPas encore d'évaluation
- The Importance of Hard Work in SuccessDocument1 pageThe Importance of Hard Work in Successniranjan_meharPas encore d'évaluation
- Brahma Kadi GinaDocument4 pagesBrahma Kadi GinaAswith R ShenoyPas encore d'évaluation
- PTC's Sustainability Model Turns High Risk into Viable SolutionDocument4 pagesPTC's Sustainability Model Turns High Risk into Viable SolutiongavinilaaPas encore d'évaluation
- TeluguvDocument1 pageTeluguvniranjan_meharPas encore d'évaluation
- RulesDocument39 pagesRulesniranjan_meharPas encore d'évaluation
- 2013 2013 1 PB PDFDocument28 pages2013 2013 1 PB PDFImran ShahzadPas encore d'évaluation
- SG30 - 33 - 40 - 50CX - 30 - 50CX-NI User ManualDocument127 pagesSG30 - 33 - 40 - 50CX - 30 - 50CX-NI User ManualKamila NunesPas encore d'évaluation
- CONTROHWDocument52 pagesCONTROHWsaeed negahdariPas encore d'évaluation
- Catalog 7 CDocument62 pagesCatalog 7 CRoberto Jarpa SandovalPas encore d'évaluation
- SEMIKRON Technical Explanation SEMiX® - IGBT Modules + Bridge Rectifier Family EN 2009-10-14 Rev-03Document36 pagesSEMIKRON Technical Explanation SEMiX® - IGBT Modules + Bridge Rectifier Family EN 2009-10-14 Rev-03Michael SalcedoPas encore d'évaluation
- Inverters - ANTECHDocument21 pagesInverters - ANTECHOG100% (2)
- Powerware 9315 Uninterruptible Power System: Product FocusDocument14 pagesPowerware 9315 Uninterruptible Power System: Product FocusFabiano BavieraPas encore d'évaluation
- Inverter Hybrid Solar Zigor - DatasheetDocument4 pagesInverter Hybrid Solar Zigor - DatasheetManuel RoblesPas encore d'évaluation
- EE1303 Lab Manual: Power Electronics ExperimentsDocument45 pagesEE1303 Lab Manual: Power Electronics ExperimentsChaitanya SingumahantiPas encore d'évaluation
- Fronius IG Plus InverterDocument2 pagesFronius IG Plus InverterJie RongPas encore d'évaluation
- MS Samsung Joint Multi Airconditioner PDFDocument2 pagesMS Samsung Joint Multi Airconditioner PDFMacSparesPas encore d'évaluation
- Sine Wave Double Conversion UPS Galaxy Series 1500VA 3000VADocument3 pagesSine Wave Double Conversion UPS Galaxy Series 1500VA 3000VAمهندس الكترونيPas encore d'évaluation
- Dex Etanormx: Standardised KSB Pump Etanorm (Etn)Document9 pagesDex Etanormx: Standardised KSB Pump Etanorm (Etn)tunlinooPas encore d'évaluation
- Zhao. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionDocument10 pagesZhao. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space DecompositionAnonymous 1D3dCWNcPas encore d'évaluation
- Apc-Smart Ups 400Document44 pagesApc-Smart Ups 400Adam CollinsPas encore d'évaluation
- Commissioning Checklist V6.0Document5 pagesCommissioning Checklist V6.0HashemAliHashemPas encore d'évaluation
- 30-04-2021-1619773544-6-Ijeee-8. Ijeee - Advanced Controlling Schemes For Active Power Filter Under Varying Load A ReviewDocument14 pages30-04-2021-1619773544-6-Ijeee-8. Ijeee - Advanced Controlling Schemes For Active Power Filter Under Varying Load A Reviewiaset123Pas encore d'évaluation
- The PLC, Simulators, Controls and Automation Training SystemsDocument26 pagesThe PLC, Simulators, Controls and Automation Training SystemsVictor J. OrePas encore d'évaluation
- Catalog UPS2009 PDFDocument53 pagesCatalog UPS2009 PDFEny Sri RyPas encore d'évaluation
- IEM - 15 - Grid-Connected Photovoltaic Systems An Overview of Recent Research and Emerging PV Converter Technology - 1Document36 pagesIEM - 15 - Grid-Connected Photovoltaic Systems An Overview of Recent Research and Emerging PV Converter Technology - 1Swati KarPas encore d'évaluation
- SPWM strategy for open-end winding induction motor drive using two invertersDocument4 pagesSPWM strategy for open-end winding induction motor drive using two invertersGanesh ChallaPas encore d'évaluation
- STGB30H60DFB, STGP30H60DFB: Trench Gate Field-Stop 600 V, 30 A High Speed HB Series IGBTDocument21 pagesSTGB30H60DFB, STGP30H60DFB: Trench Gate Field-Stop 600 V, 30 A High Speed HB Series IGBTJoão de barroPas encore d'évaluation
- Predicting Electrical Demand and Power Quality in Hot Rolling MillsDocument10 pagesPredicting Electrical Demand and Power Quality in Hot Rolling Millsabhianand123Pas encore d'évaluation
- LMG7420PLFCDocument24 pagesLMG7420PLFCFábio Vitor MartinsPas encore d'évaluation
- What is a VFD? Understanding Variable Frequency DrivesDocument4 pagesWhat is a VFD? Understanding Variable Frequency Driveschandrakanth100% (2)
- UniTrain - Tehnologii AutoDocument44 pagesUniTrain - Tehnologii AutoHYGPas encore d'évaluation
- Service Manual: Star T3/T3R UPS 1kVA 3kVA 220VACDocument14 pagesService Manual: Star T3/T3R UPS 1kVA 3kVA 220VACMuhaimin Muhammad romadhonPas encore d'évaluation
- 19010355-SC - V0.0 (19010355 《MD500 User Manual》-pdf - 20151118Document340 pages19010355-SC - V0.0 (19010355 《MD500 User Manual》-pdf - 20151118Ks BharathiyarPas encore d'évaluation
- Flux Mag 53 enDocument18 pagesFlux Mag 53 enЛадо КиладзеPas encore d'évaluation
- Kehua Product LineDocument20 pagesKehua Product LineArslan ShafqatPas encore d'évaluation
- Business Plan for Solar System Installation ServiceDocument13 pagesBusiness Plan for Solar System Installation ServiceTechnical saadPas encore d'évaluation