Vous aimerez peut-être aussi
- ForgingDocument17 pagesForgingNAGARAJUPas encore d'évaluation
- Determining Electric Motor Load and Efficiency: F A C T S H E E TDocument16 pagesDetermining Electric Motor Load and Efficiency: F A C T S H E E TwahonotPas encore d'évaluation
- Metal Price Monitor October 2019191023162010420Document19 pagesMetal Price Monitor October 2019191023162010420parveen kohliPas encore d'évaluation
- Tipos de Tratamientos PDFDocument1 pageTipos de Tratamientos PDFJose PerezPas encore d'évaluation
- Ev ThreadDocument1 pageEv ThreadGurjeevAnandPas encore d'évaluation
- Price ListDocument52 pagesPrice ListNuwan AsankaPas encore d'évaluation
- 2386 7 PDFDocument28 pages2386 7 PDFIndira BanerjeePas encore d'évaluation
- Artigo - Hulya Arslan, 2019 - Síntese de Um Novo Superplastificante À Base deDocument9 pagesArtigo - Hulya Arslan, 2019 - Síntese de Um Novo Superplastificante À Base deLucasPas encore d'évaluation
- Is 2720 8 1983 PDFDocument14 pagesIs 2720 8 1983 PDFvsshayan_2374207620% (1)
- ProductivityDocument37 pagesProductivityKaewal GalaPas encore d'évaluation
- Use of Bottom Ash As Fine Aggregate in Concrete A Review Ijariie3297Document10 pagesUse of Bottom Ash As Fine Aggregate in Concrete A Review Ijariie3297Sphero CastilloPas encore d'évaluation
- Cupola Melting CostDocument3 pagesCupola Melting CostnirevievPas encore d'évaluation
- Flexible Electronics: Presented by Ashwin.k 4SN14EC704Document16 pagesFlexible Electronics: Presented by Ashwin.k 4SN14EC704Aswin PrEmrajPas encore d'évaluation
- Incremental Forming in Tailor Welded BlanksDocument24 pagesIncremental Forming in Tailor Welded BlanksSitanshu S0% (1)
- Steel and Pipes For Africa Price ListDocument1 pageSteel and Pipes For Africa Price ListLazuardhy Vozika Futur100% (1)
- "Effect of Corrosion On RC Building": "Tanhavi Gajbhiye"Document28 pages"Effect of Corrosion On RC Building": "Tanhavi Gajbhiye"TanviPas encore d'évaluation
- Tiles Report FormatDocument7 pagesTiles Report FormatImran KhanPas encore d'évaluation
- Target Costing: Ludwigsburg VMDocument11 pagesTarget Costing: Ludwigsburg VMkashi3027Pas encore d'évaluation
- LPDC Flow SimulationDocument5 pagesLPDC Flow SimulationDavid JendraPas encore d'évaluation
- A Handbook of Planning of Office Buildings: Central Public Works Department (CPWD)Document91 pagesA Handbook of Planning of Office Buildings: Central Public Works Department (CPWD)Jatin Chander SinglaPas encore d'évaluation
- Overhead Analysis8Document14 pagesOverhead Analysis8AberraPas encore d'évaluation
- You Enter Information Only in The Shaded CellsDocument9 pagesYou Enter Information Only in The Shaded CellsEmba MadrasPas encore d'évaluation
- CostTable Materials 2022Document7 pagesCostTable Materials 2022shaffin jeba shinuPas encore d'évaluation
- Cost Estimate For Tricked Out 14 X 14 CabinDocument3 pagesCost Estimate For Tricked Out 14 X 14 CabinAlex Tango FuegoPas encore d'évaluation
- Best Fit PCB CalculatorDocument1 pageBest Fit PCB Calculatorsmtdrkd100% (12)
- Commercial VehicleDocument12 pagesCommercial VehicleAsif ShaikhPas encore d'évaluation
- S7 - Manufacturing Engineering Design Stamping Relative Tooling Cost PDFDocument33 pagesS7 - Manufacturing Engineering Design Stamping Relative Tooling Cost PDFbrighton chapfuwa100% (1)
- GD & T Tolerance Stack UpDocument19 pagesGD & T Tolerance Stack UpHemantPas encore d'évaluation
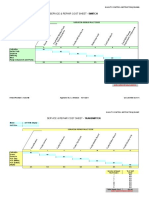
- Service & Repair Cost Sheet - Switch: D P Ar Ts Te M S E NC Lo Su Re Au LT Ith M Ec H TW Ith R An Ge NT C Om Po Ne NT SDocument3 pagesService & Repair Cost Sheet - Switch: D P Ar Ts Te M S E NC Lo Su Re Au LT Ith M Ec H TW Ith R An Ge NT C Om Po Ne NT SAzhar KhanPas encore d'évaluation
- DPR Quotation Letter - ACIDocument4 pagesDPR Quotation Letter - ACIMadhav100% (1)
- Add: Purchases Net of Scheme Cost (Including F. Goods Purchases)Document12 pagesAdd: Purchases Net of Scheme Cost (Including F. Goods Purchases)rinku10431Pas encore d'évaluation
- Rate Analyses Door and Window FixingDocument1 pageRate Analyses Door and Window Fixingsachin_matePas encore d'évaluation
- Admixtures OlekDocument36 pagesAdmixtures OlekPaul FierroPas encore d'évaluation
- CalculationDocument120 pagesCalculationRakeshSinhaRayPas encore d'évaluation
- ConcreteDocument19 pagesConcreteShravan KumarPas encore d'évaluation
- Microsoft Word - Molding Notes Rev 03Document43 pagesMicrosoft Word - Molding Notes Rev 03Panir Selvam Periannan100% (1)
- ST 9122 Experimental Techniques and InstrumentationDocument18 pagesST 9122 Experimental Techniques and InstrumentationananthaaPas encore d'évaluation
- Rate AnalysisDocument4 pagesRate Analysisnagaraj_qce3499100% (1)
- Role of Architect in Public ServicesDocument18 pagesRole of Architect in Public ServicesAr. Shadab SaifiPas encore d'évaluation
- Slope Stability Analysis TemplateDocument16 pagesSlope Stability Analysis TemplateScarlet SalayonPas encore d'évaluation
- BreakdownDocument1 pageBreakdownFrank SantPas encore d'évaluation
- EFFECT OF SISAL FIBRE IN FLY ASH BASED .ProjectDocument26 pagesEFFECT OF SISAL FIBRE IN FLY ASH BASED .ProjectSuriya PonrajPas encore d'évaluation
- NPD Presentation: Presented by Shruthi. S Sunil S. Jain Uttam Kumar Vijay Thompson. BDocument14 pagesNPD Presentation: Presented by Shruthi. S Sunil S. Jain Uttam Kumar Vijay Thompson. BVijay ThompsonPas encore d'évaluation
- Pipe LineDocument75 pagesPipe Linekiran raghukiranPas encore d'évaluation
- Payback CalculationDocument2 pagesPayback CalculationVenkat CherukuriPas encore d'évaluation
- Aor 41-82Document122 pagesAor 41-82Engr SwapanPas encore d'évaluation
- Tailor Welded BlanksDocument52 pagesTailor Welded BlanksYuvaraj YuvarajPas encore d'évaluation
- P14+ +Mufid+Al+Samerai+ +presentation - UnlockedDocument123 pagesP14+ +Mufid+Al+Samerai+ +presentation - UnlockedRufus ChengPas encore d'évaluation
- Is.13630.1-5.2006 CERAMIC TILESDocument50 pagesIs.13630.1-5.2006 CERAMIC TILESBattula SridharPas encore d'évaluation
- Is Codes ListDocument37 pagesIs Codes Listmoondonoo7Pas encore d'évaluation
- Department of Civil Engineering List of Indian Road Congress (Irc)Document7 pagesDepartment of Civil Engineering List of Indian Road Congress (Irc)senthilncc100% (1)
- Design RCCDocument27 pagesDesign RCCAnonymous HJ7hmihhPas encore d'évaluation
- JGB37-550-Geared Motor PDFDocument12 pagesJGB37-550-Geared Motor PDFNguyễn Tấn KhiêmPas encore d'évaluation
- Brochure - 14.458 DC Spring Apllied BrakesDocument2 pagesBrochure - 14.458 DC Spring Apllied Brakeskpr_02161371Pas encore d'évaluation
- Intelligent Braking System Literature ReviewDocument39 pagesIntelligent Braking System Literature ReviewRaj WagdariPas encore d'évaluation
- Ge VFD MotorsDocument33 pagesGe VFD Motorssanjay.gawadePas encore d'évaluation
- ABB Servo Motors: 9C Series For ABB High Performance Machinery DrivesDocument8 pagesABB Servo Motors: 9C Series For ABB High Performance Machinery DriveseduantonioPas encore d'évaluation
- ZF Tiratron Catalog Rev 0 PDFDocument28 pagesZF Tiratron Catalog Rev 0 PDFNaracu FabianPas encore d'évaluation
- Fast, Precise Torque Adjustment! Precision Tork™ Clutches and BrakesDocument8 pagesFast, Precise Torque Adjustment! Precision Tork™ Clutches and BrakesFrancisco A. GarcíaPas encore d'évaluation
- Motor Tarque CalculationsDocument5 pagesMotor Tarque CalculationsmuhdqasimPas encore d'évaluation
- The TranscenderDocument2 pagesThe TranscenderLipika KanojiaPas encore d'évaluation
- Entren Preneur ShipDocument2 pagesEntren Preneur ShipLipika KanojiaPas encore d'évaluation
- Hello World? What Do You Even Mean!?: #IncludeDocument5 pagesHello World? What Do You Even Mean!?: #IncludeLipika KanojiaPas encore d'évaluation
- Delhi Public School, R.K.Puram, New Delhi Computer ScienceDocument10 pagesDelhi Public School, R.K.Puram, New Delhi Computer ScienceLipika KanojiaPas encore d'évaluation
- 01 CS12Worksheet1 2012Document2 pages01 CS12Worksheet1 2012Lipika KanojiaPas encore d'évaluation
- 08FilesC++Part1 2012Document3 pages08FilesC++Part1 2012Lipika KanojiaPas encore d'évaluation
- Report No. 5: From: 23.06.2014 To: 28.06.2014Document3 pagesReport No. 5: From: 23.06.2014 To: 28.06.2014Lipika KanojiaPas encore d'évaluation
- Report No. 8: From: 14.07.2014 To: 18.07.2014Document3 pagesReport No. 8: From: 14.07.2014 To: 18.07.2014Lipika KanojiaPas encore d'évaluation
- Second LastDocument3 pagesSecond LastLipika KanojiaPas encore d'évaluation
- FilingDocument4 pagesFilingLipika KanojiaPas encore d'évaluation
- Report No.: Lipika Kanojia Mechanical EngineeringDocument3 pagesReport No.: Lipika Kanojia Mechanical EngineeringLipika KanojiaPas encore d'évaluation
- SongDocument1 pageSongLipika KanojiaPas encore d'évaluation
- Last Week MilingDocument5 pagesLast Week MilingLipika KanojiaPas encore d'évaluation
- Report No. 4: From: 16.06.2014 To: 21.06.2014Document3 pagesReport No. 4: From: 16.06.2014 To: 21.06.2014Lipika KanojiaPas encore d'évaluation
- Xii BiomoleculesDocument23 pagesXii BiomoleculesLipika Kanojia0% (1)
- 05C QuickReview2012Document8 pages05C QuickReview2012Lipika KanojiaPas encore d'évaluation
- mgpg11 - A Beginner's Guide To Uncertainty of Measurement by Stephanie BellDocument41 pagesmgpg11 - A Beginner's Guide To Uncertainty of Measurement by Stephanie Bellarylananyla100% (2)
- BS 4999-143-1987 Requirements For Rotating Electrical MachinDocument8 pagesBS 4999-143-1987 Requirements For Rotating Electrical MachinJames AlejoPas encore d'évaluation
- SCADA Security: What Is An Industrial Control System?Scada - PCS, Dcs SecurityDocument3 pagesSCADA Security: What Is An Industrial Control System?Scada - PCS, Dcs SecurityDeeee357100% (1)
- Eicher Polaris Multix - WikipediaDocument15 pagesEicher Polaris Multix - WikipediaChaitanya KulkarniPas encore d'évaluation
- Visual Identity Guidelines: July 2019Document17 pagesVisual Identity Guidelines: July 2019zae nuddinPas encore d'évaluation
- Gcia ToolsDocument17 pagesGcia Toolsjbrackett239Pas encore d'évaluation
- ASTM - F1335-2004 - Norma Resistencia TuberíasDocument11 pagesASTM - F1335-2004 - Norma Resistencia TuberíasToni VidalPas encore d'évaluation
- Bulk Carrier SafetyDocument3 pagesBulk Carrier SafetySuvesh nlnPas encore d'évaluation
- Example Sheet 1Document5 pagesExample Sheet 1Hoang MinhPas encore d'évaluation
- Medical Electrical Equipment - Part 2-19: Particular Requirements For The Basic Safety and Essential Performance of Infant IncubatorsDocument46 pagesMedical Electrical Equipment - Part 2-19: Particular Requirements For The Basic Safety and Essential Performance of Infant IncubatorsEver Daniel Castro RodriguezPas encore d'évaluation
- 23xrv 4ssDocument154 pages23xrv 4ssLouie DupayaPas encore d'évaluation
- Unimotor Manual v2bDocument119 pagesUnimotor Manual v2bFranCanavPas encore d'évaluation
- As 4177.5-2004 Caravan and Light Trailer Towing Components Electrical ConnectorsDocument7 pagesAs 4177.5-2004 Caravan and Light Trailer Towing Components Electrical ConnectorsSAI Global - APACPas encore d'évaluation
- Risks Assessment - Al Khor ProjectDocument4 pagesRisks Assessment - Al Khor Projectloveson709Pas encore d'évaluation
- AS350 - Full Capacity - Spec - Rev2.2Document5 pagesAS350 - Full Capacity - Spec - Rev2.2Fin HasPas encore d'évaluation
- 9e921b Rotary Drive System Inst InstrDocument29 pages9e921b Rotary Drive System Inst InstrElias GarciaPas encore d'évaluation
- Standby 5 0 0 e K W 6 2 5 K V A 60 HZ 1800 RPM 480 Volts: Diesel Generator SetDocument6 pagesStandby 5 0 0 e K W 6 2 5 K V A 60 HZ 1800 RPM 480 Volts: Diesel Generator Setlpolo12Pas encore d'évaluation
- ZCKJ1H29 Telemecanique Datasheet 503753.Pdf0Document12 pagesZCKJ1H29 Telemecanique Datasheet 503753.Pdf0Sergio RoblesPas encore d'évaluation
- Saudi Aramco Inspection ChecklistDocument4 pagesSaudi Aramco Inspection ChecklistMa.socorro SaballaPas encore d'évaluation
- Scapy Packet Manuplation: CE 340/S. KondakcıDocument53 pagesScapy Packet Manuplation: CE 340/S. KondakcıSamit JainPas encore d'évaluation
- Yum Command Examples - Install, Uninstall, Update PackagesDocument13 pagesYum Command Examples - Install, Uninstall, Update Packagesdraja123Pas encore d'évaluation
- Engineering Standards: Name Engineering Standard NumberDocument10 pagesEngineering Standards: Name Engineering Standard NumberpathinathanPas encore d'évaluation
- Blow Down ValveDocument2 pagesBlow Down Valvesabi_shiPas encore d'évaluation
- What Is An Audio FormatDocument24 pagesWhat Is An Audio FormatPritam DesaiPas encore d'évaluation
- Wilson2016 PDFDocument24 pagesWilson2016 PDFHuda YudistiraPas encore d'évaluation
- IEng and CEng Applications WorkshopDocument2 pagesIEng and CEng Applications WorkshopmachinemanPas encore d'évaluation
- Holdpeak 1356 enDocument39 pagesHoldpeak 1356 enGabrielyNoelia GarayPas encore d'évaluation
- Methodstatementhq Com GRP Pipe Installation and Lamination Method Statement HTML PDFDocument22 pagesMethodstatementhq Com GRP Pipe Installation and Lamination Method Statement HTML PDFHaithem ChairiPas encore d'évaluation
- Air BagDocument17 pagesAir BagPrabir Kumar PatiPas encore d'évaluation
- ISO 8583 Message ProcessorDocument79 pagesISO 8583 Message Processormariani2104Pas encore d'évaluation
- 9 2v102 PDFDocument85 pages9 2v102 PDFtetrapoltestPas encore d'évaluation