Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Lawn-Boy Service Manual 1950-88 CompleteDocument639 pagesLawn-Boy Service Manual 1950-88 Completemasterviking83% (35)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Akruti Marathi MultiFont Engine ReadmeDocument22 pagesAkruti Marathi MultiFont Engine Readmenmshingote2779% (38)
- Iron Man Helmet Papercraft Template PDFDocument4 pagesIron Man Helmet Papercraft Template PDFNishant Khandekar25% (8)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Bianca Premo - The Enlightenment On Trial - Ordinary Litigants and Colonialism in The Spanish Empire-Oxford University Press (2017)Document385 pagesBianca Premo - The Enlightenment On Trial - Ordinary Litigants and Colonialism in The Spanish Empire-Oxford University Press (2017)David Quintero100% (2)
- 400 KV Line SpecificationDocument305 pages400 KV Line SpecificationAjay Das86% (7)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Shandong University CourseoutlineDocument2 pagesShandong University CourseoutlineGhayas Ud-din DarPas encore d'évaluation
- Bilateral Trade Between Pakistan and ChinaDocument3 pagesBilateral Trade Between Pakistan and ChinaGhayas Ud-din DarPas encore d'évaluation
- Bnote 0116Document2 pagesBnote 0116Ghayas Ud-din DarPas encore d'évaluation
- Applied CriminologyDocument1 pageApplied CriminologyGhayas Ud-din DarPas encore d'évaluation
- About Public AdministrationDocument3 pagesAbout Public AdministrationGhayas Ud-din DarPas encore d'évaluation
- The Application Form: The President of ICSESDocument1 pageThe Application Form: The President of ICSESGhayas Ud-din DarPas encore d'évaluation
- How To Write Your First Research Paper: Focus: Education - Career AdviceDocument10 pagesHow To Write Your First Research Paper: Focus: Education - Career AdviceRicardo ChavarriaPas encore d'évaluation
- Calender of 1st Quarter 2017 Without Resource PersonDocument2 pagesCalender of 1st Quarter 2017 Without Resource PersonGhayas Ud-din DarPas encore d'évaluation
- Communication and Visibility Manual enDocument44 pagesCommunication and Visibility Manual enZvezdana LjubenkovicPas encore d'évaluation
- CVDocument4 pagesCVGhayas Ud-din DarPas encore d'évaluation
- Analysis of Energy Crises & Remidial Measures Proposed in PakistanDocument19 pagesAnalysis of Energy Crises & Remidial Measures Proposed in PakistanGhayas Ud-din DarPas encore d'évaluation
- COMPARISON BETWEEN BHASHA AND KALABAGH DAMS Chariman Sab PresentationDocument11 pagesCOMPARISON BETWEEN BHASHA AND KALABAGH DAMS Chariman Sab PresentationGhayas Ud-din DarPas encore d'évaluation
- 00 Contact InfoDocument1 page00 Contact InfoGhayas Ud-din DarPas encore d'évaluation
- 3rd CPD - On Energy ManagementArjumandsheikh 17-12-2011Document57 pages3rd CPD - On Energy ManagementArjumandsheikh 17-12-2011Ghayas Ud-din DarPas encore d'évaluation
- IEP CPDCalendar2017Document3 pagesIEP CPDCalendar2017Ghayas Ud-din DarPas encore d'évaluation
- 8 Cyber SecuirtyDocument47 pages8 Cyber SecuirtyGhayas Ud-din DarPas encore d'évaluation
- 9-Implementation Transition PlanningDocument60 pages9-Implementation Transition PlanningGhayas Ud-din DarPas encore d'évaluation
- Grid Issues OverviewDocument26 pagesGrid Issues OverviewGhayas Ud-din DarPas encore d'évaluation
- 3 Rate DesignDocument33 pages3 Rate DesignGhayas Ud-din DarPas encore d'évaluation
- List of Universities Having No Application Processing FeeDocument2 pagesList of Universities Having No Application Processing FeeGhayas Ud-din DarPas encore d'évaluation
- SmartGrid101 IntroductionDocument28 pagesSmartGrid101 IntroductionBhalchandra MurariPas encore d'évaluation
- 7 PrivacyDocument39 pages7 PrivacyGhayas Ud-din DarPas encore d'évaluation
- About Smart GridDocument38 pagesAbout Smart GridGhayas Ud-din DarPas encore d'évaluation
- Zeljkovic CedomirDocument6 pagesZeljkovic CedomirPatriceEmPas encore d'évaluation
- Jiangsu Uni.... 2016 International Students ProspectusDocument40 pagesJiangsu Uni.... 2016 International Students ProspectusGhayas Ud-din DarPas encore d'évaluation
- Kashmir AjkDocument1 pageKashmir AjkMalik Alii JaanPas encore d'évaluation
- Pushto SongsDocument1 pagePushto SongsGhayas Ud-din DarPas encore d'évaluation
- Rules For Writing Research PaperDocument8 pagesRules For Writing Research PaperGhayas Ud-din DarPas encore d'évaluation
- Improved-power-conditioning-system-Of Micro Hydro PP For Distributed GenerationDocument6 pagesImproved-power-conditioning-system-Of Micro Hydro PP For Distributed GenerationGhayas Ud-din DarPas encore d'évaluation
- Advanced Numerical Modelling of Geogrids and Steel Wire Meshes - Daniele TubertiniDocument94 pagesAdvanced Numerical Modelling of Geogrids and Steel Wire Meshes - Daniele TubertiniSze Mian KuehPas encore d'évaluation
- 16 Advantages & 10 Disadvantages of Solar Panels in 2022Document29 pages16 Advantages & 10 Disadvantages of Solar Panels in 2022xaxinev359100% (1)
- 01-Toy Product DesignDocument54 pages01-Toy Product DesignJuanPas encore d'évaluation
- Procedure Issuing EtaDocument5 pagesProcedure Issuing EtaCarlos FrançaPas encore d'évaluation
- 1 Conformity Asch StudyDocument31 pages1 Conformity Asch StudyjasbruPas encore d'évaluation
- UA5000 V100R019C06 Hardware Description 05 PDFDocument563 pagesUA5000 V100R019C06 Hardware Description 05 PDFdabouzia slahPas encore d'évaluation
- Dystopian LiteratureDocument3 pagesDystopian LiteratureLol LeePas encore d'évaluation
- Lecture 12 Public Administration and Development 2017Document23 pagesLecture 12 Public Administration and Development 2017Raheel Joyia100% (1)
- Sample Question Paper Computer GraphicsDocument4 pagesSample Question Paper Computer Graphicsrohit sanjay shindePas encore d'évaluation
- Antennas and Wave Propagation - Nov - 2015Document8 pagesAntennas and Wave Propagation - Nov - 2015Jyothi SamanthulaPas encore d'évaluation
- Surge CounterDocument2 pagesSurge CounterJavier CuzcoPas encore d'évaluation
- MC68 HC05 B4 UDocument253 pagesMC68 HC05 B4 Uflo724Pas encore d'évaluation
- Pdpa CraDocument3 pagesPdpa CraAdyrah RahmanPas encore d'évaluation
- Sebu6100-02 MDocument74 pagesSebu6100-02 MSa CruCerPas encore d'évaluation
- Journal Publishing ProcessDocument1 pageJournal Publishing Processmohamedr55104Pas encore d'évaluation
- Fi̇z 137-CH 1-Measurement PDFDocument27 pagesFi̇z 137-CH 1-Measurement PDFkaskoskasPas encore d'évaluation
- Qüestionari KPSI.: ActivitiesDocument2 pagesQüestionari KPSI.: ActivitiesfrancisPas encore d'évaluation
- NC1 AC Contactor, 9 95A: Contactors ContactorsDocument2 pagesNC1 AC Contactor, 9 95A: Contactors ContactorsYamendra GurungPas encore d'évaluation
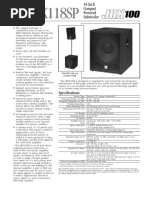
- JRX118SP SpecsheetDocument2 pagesJRX118SP SpecsheetLuisPas encore d'évaluation
- NA BR 1177 EN Dematic AutoStore SubsystemDocument8 pagesNA BR 1177 EN Dematic AutoStore SubsystemDaniel Garnando KristianPas encore d'évaluation
- PT2 Exam CLASS XI CS 2023Document2 pagesPT2 Exam CLASS XI CS 2023Aditya AurangePas encore d'évaluation
- Summary Good To GreatDocument5 pagesSummary Good To GreatAziz ur RehmanPas encore d'évaluation
- CHCDIV001 - Student Assessment Booklet ECEC.v2.0Document59 pagesCHCDIV001 - Student Assessment Booklet ECEC.v2.0Dink DinkPas encore d'évaluation
- PETSOC-98-02-06 Mattar, L. McNeil, R. The Flowing Gas-Material Balance PDFDocument4 pagesPETSOC-98-02-06 Mattar, L. McNeil, R. The Flowing Gas-Material Balance PDFSolenti D'nouPas encore d'évaluation
- QuestionnaireDocument5 pagesQuestionnairePrisca FolorunsoPas encore d'évaluation
- Data Analaysis and InterpretationDocument56 pagesData Analaysis and Interpretationporkodisvl100% (2)