Vous aimerez peut-être aussi
- The Mathematics of Marital Conflict Dynamic Mathematical Nonlinear Modeling of Newlywed Marital InteractionDocument17 pagesThe Mathematics of Marital Conflict Dynamic Mathematical Nonlinear Modeling of Newlywed Marital InteractionfddddddPas encore d'évaluation
- Surface Wave Methods For Near-Surface Site Characterization: Sebastiano Foti Carlo G. Lai Glenn J. Rix Claudio StrobbiaDocument482 pagesSurface Wave Methods For Near-Surface Site Characterization: Sebastiano Foti Carlo G. Lai Glenn J. Rix Claudio StrobbiaEdgard Gines100% (1)
- Sinusoidal Synthesis of Speech Using MATLABDocument35 pagesSinusoidal Synthesis of Speech Using MATLABAkshay JainPas encore d'évaluation
- CollinDodds WalterscottDocument103 pagesCollinDodds WalterscottkasavisutanPas encore d'évaluation
- Wind Tunnel TestDocument32 pagesWind Tunnel TestAristo Onan100% (1)
- Lecture 1 - Traditional Voice Versus Unified VoiceDocument73 pagesLecture 1 - Traditional Voice Versus Unified VoiceBrandon HamadPas encore d'évaluation
- Digital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionD'EverandDigital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionPas encore d'évaluation
- Gerg 2008 PDFDocument60 pagesGerg 2008 PDFfddddddPas encore d'évaluation
- Sherlock Eurus Violin DuetDocument4 pagesSherlock Eurus Violin DuetfddddddPas encore d'évaluation
- Digital Sound Synthesis by Physical ModellingDocument12 pagesDigital Sound Synthesis by Physical ModellingBrandy ThomasPas encore d'évaluation
- Hearing Aids - Gerald R. Popelka, Brian C. J. Moore, Richard R. Fay, Arthur N. PopperDocument341 pagesHearing Aids - Gerald R. Popelka, Brian C. J. Moore, Richard R. Fay, Arthur N. PopperakPas encore d'évaluation
- AllProblemSets PDFDocument16 pagesAllProblemSets PDFMaxamed CabdiraximPas encore d'évaluation
- Digital Communications: Courses and Exercises with SolutionsD'EverandDigital Communications: Courses and Exercises with SolutionsÉvaluation : 3 sur 5 étoiles3/5 (2)
- PadovaniDocument4 pagesPadovaniQiyanPas encore d'évaluation
- Content-Based Classification of Musical Instrument Timbres: Agostini Longari PollastriDocument8 pagesContent-Based Classification of Musical Instrument Timbres: Agostini Longari Pollastrihrishi30Pas encore d'évaluation
- 3 Deec 51 Ae 28 Ba 013 A 4Document5 pages3 Deec 51 Ae 28 Ba 013 A 4Carrot ItCsPas encore d'évaluation
- Audio Analysis Using The Discrete Wavelet Transform: 1 2 Related WorkDocument6 pagesAudio Analysis Using The Discrete Wavelet Transform: 1 2 Related WorkAlexandro NababanPas encore d'évaluation
- Voice Analysis Using Short Time Fourier Transform and Cross Correlation MethodsDocument6 pagesVoice Analysis Using Short Time Fourier Transform and Cross Correlation MethodsprasadPas encore d'évaluation
- Pitch Detection of Speech Signals (Project Report)Document9 pagesPitch Detection of Speech Signals (Project Report)Minal FatymaPas encore d'évaluation
- Bell ShortenedDocument12 pagesBell ShortenedbellPas encore d'évaluation
- SP - Project ReportDocument12 pagesSP - Project ReportZaïd BouslikhinPas encore d'évaluation
- Frequency Domain ProcessingDocument3 pagesFrequency Domain ProcessingIoana TăleanuPas encore d'évaluation
- Scream and Gunshot Detection and Localization For Audio-Surveillance SystemsDocument6 pagesScream and Gunshot Detection and Localization For Audio-Surveillance Systemsaksj1186Pas encore d'évaluation
- Music Source Separation: Francisco Javier Cifuentes Garc IaDocument7 pagesMusic Source Separation: Francisco Javier Cifuentes Garc IaFrank CifuentesPas encore d'évaluation
- Miron Et Al. - 2013 - An Open-Source Drum Transcription System For Pure Data and Max MSPDocument5 pagesMiron Et Al. - 2013 - An Open-Source Drum Transcription System For Pure Data and Max MSPAlessandro RatociPas encore d'évaluation
- Speech Enhancement With Natural Sounding Residual Noise Based On Connected Time-Frequency Speech Presence RegionsDocument11 pagesSpeech Enhancement With Natural Sounding Residual Noise Based On Connected Time-Frequency Speech Presence RegionsrakeshinaniPas encore d'évaluation
- ReportDocument5 pagesReportChokkarapu Anil100% (1)
- A Pitch Detection AlgorithmDocument6 pagesA Pitch Detection AlgorithmNavneeth NarayanPas encore d'évaluation
- Ma KaleDocument3 pagesMa KalesalihyucaelPas encore d'évaluation
- 752 Frequency ModulationDocument10 pages752 Frequency ModulationMiki ArsovskiPas encore d'évaluation
- Implementing Loudness Models in MatlabDocument5 pagesImplementing Loudness Models in MatlabPro AcousticPas encore d'évaluation
- CR 1513Document4 pagesCR 1513Moshe AlonsoPas encore d'évaluation
- A Self-Steering Digital Microphone Array: At&T NJ, UsaDocument4 pagesA Self-Steering Digital Microphone Array: At&T NJ, UsaMayssa RjaibiaPas encore d'évaluation
- Low-Latency Convolution For Real-Time ApplicationDocument7 pagesLow-Latency Convolution For Real-Time ApplicationotringalPas encore d'évaluation
- Particle Filtering For Bearing-Only Audio-Visual Speaker Detection and TrackingDocument6 pagesParticle Filtering For Bearing-Only Audio-Visual Speaker Detection and Trackingyasser_nasef5399Pas encore d'évaluation
- A Computationally Efficient Speech/music Discriminator For Radio RecordingsDocument4 pagesA Computationally Efficient Speech/music Discriminator For Radio RecordingsPablo Loste RamosPas encore d'évaluation
- A Robust Frequency Offset Estimation Scheme For OFDM SystemsDocument6 pagesA Robust Frequency Offset Estimation Scheme For OFDM SystemsSoumitra BhowmickPas encore d'évaluation
- Speech-Music Discrimination: A Deep Learning Perspective: Aggelos Pikrakis Sergios TheodoridisDocument5 pagesSpeech-Music Discrimination: A Deep Learning Perspective: Aggelos Pikrakis Sergios TheodoridisdamibardPas encore d'évaluation
- Qiaozhan Gao Report ReportFinalDocument6 pagesQiaozhan Gao Report ReportFinalfddddddPas encore d'évaluation
- Exploring Phase Information in Sound Source SeparaDocument9 pagesExploring Phase Information in Sound Source SeparaPaulo FeijãoPas encore d'évaluation
- The Implementation of Signal Analysis in Java To Determine The Sound of Human Voice and Its Graphical Representation in Standard Music NotationDocument11 pagesThe Implementation of Signal Analysis in Java To Determine The Sound of Human Voice and Its Graphical Representation in Standard Music NotationSandro Regis CardosoPas encore d'évaluation
- Transcription of Polyphonic Piano Music With Neural NetworksDocument9 pagesTranscription of Polyphonic Piano Music With Neural NetworksDANIEL BENITEZ FIGUEROAPas encore d'évaluation
- Speaker Recognition System Using MFCC and Vector QuantizationDocument7 pagesSpeaker Recognition System Using MFCC and Vector QuantizationlambanaveenPas encore d'évaluation
- A Class of Spectrum-Sensing Schemes For Cognitive Radio Under Impulsive Noise Circumstances: Structure and Performance in Nonfading and Fading EnvironmentsDocument18 pagesA Class of Spectrum-Sensing Schemes For Cognitive Radio Under Impulsive Noise Circumstances: Structure and Performance in Nonfading and Fading EnvironmentsBedadipta BainPas encore d'évaluation
- Pitch Recognition Through Template Matching: Salim PerchyDocument11 pagesPitch Recognition Through Template Matching: Salim PerchyWerdika YudiPas encore d'évaluation
- The Cepstrum MethodDocument31 pagesThe Cepstrum MethodNiranjan ReddyPas encore d'évaluation
- Sergio Bleda José J. López Basilio PueoDocument6 pagesSergio Bleda José J. López Basilio PueoVenkatesan Thanigai ArasuPas encore d'évaluation
- Voice RecognitionDocument6 pagesVoice RecognitionVuong LuongPas encore d'évaluation
- Juhan Nam Vesa VälimäkiDocument6 pagesJuhan Nam Vesa VälimäkiHerman HessePas encore d'évaluation
- SpectrogramDocument17 pagesSpectrogramShanmugaraj VskPas encore d'évaluation
- Application of Microphone Array For Speech Coding in Noisy EnvironmentDocument5 pagesApplication of Microphone Array For Speech Coding in Noisy Environmentscribd1235207Pas encore d'évaluation
- Detection and Classification of Acoustic Scenes and Events 2016 3 September 2016, Budapest, HungaryDocument5 pagesDetection and Classification of Acoustic Scenes and Events 2016 3 September 2016, Budapest, HungaryManolo CaracolPas encore d'évaluation
- (Burges, Platt, Jana) Distortion Discriminant AnalDocument10 pages(Burges, Platt, Jana) Distortion Discriminant AnalopachecoPas encore d'évaluation
- 05235775Document7 pages05235775Pramod BhattPas encore d'évaluation
- Application of DFT Filter Bank To Power Frequency Harmonic MeasurementDocument5 pagesApplication of DFT Filter Bank To Power Frequency Harmonic Measurementfranchisca9999Pas encore d'évaluation
- Chapter - 1: 1.1 Introduction To Music Genre ClassificationDocument57 pagesChapter - 1: 1.1 Introduction To Music Genre ClassificationManoj KumarPas encore d'évaluation
- Voice Source Parameters Estimation by FiDocument5 pagesVoice Source Parameters Estimation by Figerardo7martinez-13Pas encore d'évaluation
- A Feature Smoothing Method For Chord Recognition Using Recurrence PlotsDocument6 pagesA Feature Smoothing Method For Chord Recognition Using Recurrence Plots조태민Pas encore d'évaluation
- Peeters 2006 Ismir KeyhpsDocument6 pagesPeeters 2006 Ismir KeyhpsPuthaniPas encore d'évaluation
- Convention Paper 5452: Audio Engineering SocietyDocument10 pagesConvention Paper 5452: Audio Engineering SocietyNathalia Parra GarzaPas encore d'évaluation
- Voice Signal Processing For Speech Synthesis: June 2006Document6 pagesVoice Signal Processing For Speech Synthesis: June 2006Prince ChaudharyPas encore d'évaluation
- A Comparison of Score-Level Fusion Rules For Onset Detection in Music SignalsDocument5 pagesA Comparison of Score-Level Fusion Rules For Onset Detection in Music SignalsNikhil NanalPas encore d'évaluation
- Voice Signal Processing For Speech Synthesis: June 2006Document6 pagesVoice Signal Processing For Speech Synthesis: June 2006Prince ChaudharyPas encore d'évaluation
- Semantically Controlled Adaptive Equalisation in Reduced Dimensionality Parameter SpaceDocument19 pagesSemantically Controlled Adaptive Equalisation in Reduced Dimensionality Parameter SpaceJHCPPas encore d'évaluation
- Blind Spectrum Sensing in Cognitive Radio Over Fading Channels and Frequency OffsetsDocument14 pagesBlind Spectrum Sensing in Cognitive Radio Over Fading Channels and Frequency OffsetsPankaj ShrotriyaPas encore d'évaluation
- Spectral Envelope Estimation and Representation For Sound Analysis-SynthesisDocument4 pagesSpectral Envelope Estimation and Representation For Sound Analysis-SynthesisHussein RazaqPas encore d'évaluation
- IR UWB TOA Estimation Techniques and Comparison: Sri Hareendra Bodduluri, Anil Solanki and Mani VVDocument5 pagesIR UWB TOA Estimation Techniques and Comparison: Sri Hareendra Bodduluri, Anil Solanki and Mani VVinventionjournalsPas encore d'évaluation
- Software Radio: Sampling Rate Selection, Design and SynchronizationD'EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationPas encore d'évaluation
- Audio Source Separation and Speech EnhancementD'EverandAudio Source Separation and Speech EnhancementEmmanuel VincentPas encore d'évaluation
- Qiaozhan Gao Report ReportFinalDocument6 pagesQiaozhan Gao Report ReportFinalfddddddPas encore d'évaluation
- Real Numbers, Data Science and Chaos: How To Fit Any Dataset With A Single ParameterDocument18 pagesReal Numbers, Data Science and Chaos: How To Fit Any Dataset With A Single ParameterfddddddPas encore d'évaluation
- Application and Giro Form ForDocument4 pagesApplication and Giro Form ForfddddddPas encore d'évaluation
- User Guide - EnglishDocument1 pageUser Guide - EnglishfddddddPas encore d'évaluation
- Using Your CM Storm Quick Fire TK Keyboard: Accessing Advanced FunctionsDocument2 pagesUsing Your CM Storm Quick Fire TK Keyboard: Accessing Advanced FunctionsNguyen DuyPas encore d'évaluation
- CPF Forum P2 S2 Joseph Cherian CHERIAN Presentation 220714Document12 pagesCPF Forum P2 S2 Joseph Cherian CHERIAN Presentation 220714fddddddPas encore d'évaluation
- Benetos Dixon MIREX2011Document3 pagesBenetos Dixon MIREX2011fddddddPas encore d'évaluation
- MainDocument101 pagesMainfddddddPas encore d'évaluation
- A Novel Binary Ant Colony Optimization: Application To The Unit Commitment Problem of Power SystemsDocument8 pagesA Novel Binary Ant Colony Optimization: Application To The Unit Commitment Problem of Power SystemsfddddddPas encore d'évaluation
- Grade 2Y Model Answers Exemplar 2017Document3 pagesGrade 2Y Model Answers Exemplar 2017fddddddPas encore d'évaluation
- CHOPIN Nocturne Op 9 No 2 For Violin Solo PDFDocument2 pagesCHOPIN Nocturne Op 9 No 2 For Violin Solo PDFfdddddd100% (1)
- Hisaishi Jou-'Kimi Wo Nosete' From Castle in The Sky (1986) - SheetMusicCC PDFDocument7 pagesHisaishi Jou-'Kimi Wo Nosete' From Castle in The Sky (1986) - SheetMusicCC PDFfddddddPas encore d'évaluation
- 1X Exemplar 2017 enDocument4 pages1X Exemplar 2017 endevPas encore d'évaluation
- 2013 MGMT SciDocument17 pages2013 MGMT SciPeng TerPas encore d'évaluation
- 10 1 1 622 7168 PDFDocument62 pages10 1 1 622 7168 PDFfddddddPas encore d'évaluation
- 30696290 (1)Document234 pages30696290 (1)fddddddPas encore d'évaluation
- Mosh: An Interactive Remote Shell For Mobile ClientsDocument6 pagesMosh: An Interactive Remote Shell For Mobile ClientsfddddddPas encore d'évaluation
- Waltz For MR and Mrs Watson2Document1 pageWaltz For MR and Mrs Watson2dossier5Pas encore d'évaluation
- Cleaning - Drying Pipelines PDFDocument6 pagesCleaning - Drying Pipelines PDFfddddddPas encore d'évaluation
- A New Computer Model For Gas Hydrates and Hydrate InhibitionDocument9 pagesA New Computer Model For Gas Hydrates and Hydrate InhibitionasozhyanPas encore d'évaluation
- Win13 WesterbergDocument16 pagesWin13 WesterbergfddddddPas encore d'évaluation
- Full Text 01Document99 pagesFull Text 01fddddddPas encore d'évaluation
- User-Defined Pumping Unit Into PIPESIM Database - 5704998 - 01Document5 pagesUser-Defined Pumping Unit Into PIPESIM Database - 5704998 - 01fddddddPas encore d'évaluation
- SPE Distinguished Author Series Dec 2009Document6 pagesSPE Distinguished Author Series Dec 2009fddddddPas encore d'évaluation
- How A Well FlowsDocument34 pagesHow A Well FlowsfddddddPas encore d'évaluation
- Looperator Manual EnglishDocument62 pagesLooperator Manual EnglishНиколай СтрижовPas encore d'évaluation
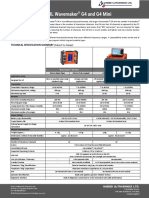
- Specifications of GUL Wavemaker G4 and G4 Mini: Technical Specification SummaryDocument2 pagesSpecifications of GUL Wavemaker G4 and G4 Mini: Technical Specification SummaryLintangPas encore d'évaluation
- Experimentation and Data Acquisition: Figure 3.1 Schematic Diagram of Set-UpDocument24 pagesExperimentation and Data Acquisition: Figure 3.1 Schematic Diagram of Set-UpasprillaPas encore d'évaluation
- Department of Electrical Engineering EE365L: Communication SystemsDocument20 pagesDepartment of Electrical Engineering EE365L: Communication SystemsAbrahan ShahzadPas encore d'évaluation
- Analog Communication Course FileDocument37 pagesAnalog Communication Course FilePrachi ParasharPas encore d'évaluation
- Modeling and Simulation of Distance Relay For Transmission Line ProtectionDocument10 pagesModeling and Simulation of Distance Relay For Transmission Line Protectionයෙදුම් Karunarathna100% (1)
- Manual Plugins VSTDocument61 pagesManual Plugins VSTEl VigiaPas encore d'évaluation
- Shanti Pavan TutorialDocument226 pagesShanti Pavan TutorialjubidownPas encore d'évaluation
- Electrical and Computer - Electronics, Controls, and Communications CBT Exam SpecificationsDocument3 pagesElectrical and Computer - Electronics, Controls, and Communications CBT Exam SpecificationsJorge GuerreroPas encore d'évaluation
- Electronics Interview Questions-Interview Questions and Answers-25073Document4 pagesElectronics Interview Questions-Interview Questions and Answers-25073Md Tarique AnsariPas encore d'évaluation
- Adre sxp408 Dspi Datasheet 172179t PDFDocument31 pagesAdre sxp408 Dspi Datasheet 172179t PDFRaj KiranPas encore d'évaluation
- D4633 - 16 Standard Test Method For Energy Measurement For Dynamic PenetrometersDocument8 pagesD4633 - 16 Standard Test Method For Energy Measurement For Dynamic Penetrometersbadrul79Pas encore d'évaluation
- Novo Documento Do Microsoft Office WordDocument9 pagesNovo Documento Do Microsoft Office WordVictor José PauloPas encore d'évaluation
- Signals & SystemsDocument63 pagesSignals & SystemsHemsundar ArepallyPas encore d'évaluation
- Functions and Type of Computer CardsDocument13 pagesFunctions and Type of Computer CardsbmanisundaramPas encore d'évaluation
- EC 263 Signals and Systems Lab PDFDocument21 pagesEC 263 Signals and Systems Lab PDFarundhupamPas encore d'évaluation
- Iare - Ac - Lab - Manual TDMDocument90 pagesIare - Ac - Lab - Manual TDMharivigneshaPas encore d'évaluation
- Cs Test 1 With AnswersDocument5 pagesCs Test 1 With Answersprabhaharan natarajanPas encore d'évaluation
- CS5460A - DatasheetDocument53 pagesCS5460A - Datasheetgabriela kubPas encore d'évaluation
- Digitizing ImagesDocument34 pagesDigitizing ImagesIzani ZainalPas encore d'évaluation
- Audio Compression Notes (Data Compression)Document35 pagesAudio Compression Notes (Data Compression)infinityankitPas encore d'évaluation
- Problem Sheet 5 - Digitisation: (Sampling and Quantization)Document6 pagesProblem Sheet 5 - Digitisation: (Sampling and Quantization)Waleed Al-NuaimyPas encore d'évaluation
- EC1351 Digital CommunicationDocument5 pagesEC1351 Digital Communicationpurushoth@aeroPas encore d'évaluation
- 1.1. Discrete-Time Signals and Systems. Basic DefinitionsDocument11 pages1.1. Discrete-Time Signals and Systems. Basic DefinitionsNirmal Kumar PandeyPas encore d'évaluation