Vous aimerez peut-être aussi
- Adsp 7Document35 pagesAdsp 7syed02Pas encore d'évaluation
- Adsp 6Document22 pagesAdsp 6syed02Pas encore d'évaluation
- Adsp 6Document22 pagesAdsp 6syed02Pas encore d'évaluation
- Cal 2 Assignment 2Document7 pagesCal 2 Assignment 2syed02Pas encore d'évaluation
- Class B Power Amplifier: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)Document14 pagesClass B Power Amplifier: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)syed02Pas encore d'évaluation
- TC-515 Advanced Digital Signal Processing: Dr. Muhammad Imran Aslam Spring 2015Document58 pagesTC-515 Advanced Digital Signal Processing: Dr. Muhammad Imran Aslam Spring 2015Sadaf AyeshaPas encore d'évaluation
- TC-515 Advanced Digital Signal Processing: Dr. Muhammad Imran Aslam Spring 2015Document58 pagesTC-515 Advanced Digital Signal Processing: Dr. Muhammad Imran Aslam Spring 2015Sadaf AyeshaPas encore d'évaluation
- Iend FunctionDocument22 pagesIend Functionsyed02Pas encore d'évaluation
- TC-515 Advanced Digital Signal Processing: Dr. Muhammad Imran Aslam Spring 2015Document58 pagesTC-515 Advanced Digital Signal Processing: Dr. Muhammad Imran Aslam Spring 2015Sadaf AyeshaPas encore d'évaluation
- Templates 1Document13 pagesTemplates 1syed02Pas encore d'évaluation
- Computer Programming Week 1 ConceptsDocument27 pagesComputer Programming Week 1 Conceptssyed02Pas encore d'évaluation
- Digital Logic Design EE (227) : Lecture-1Document6 pagesDigital Logic Design EE (227) : Lecture-1syed02Pas encore d'évaluation
- Full Wave and Bridge Rectifier: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)Document8 pagesFull Wave and Bridge Rectifier: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)syed02Pas encore d'évaluation
- 14 I-V Analysis of BJTDocument18 pages14 I-V Analysis of BJTsyed02Pas encore d'évaluation
- Chapter-2 Lec-4 Practice QuestionsDocument1 pageChapter-2 Lec-4 Practice Questionssyed02Pas encore d'évaluation
- Operating Systems: © 2007 Pearson Addison-Wesley. All Rights ReservedDocument22 pagesOperating Systems: © 2007 Pearson Addison-Wesley. All Rights Reservedsyed02Pas encore d'évaluation
- 14 I-V Analysis of BJTDocument18 pages14 I-V Analysis of BJTsyed02Pas encore d'évaluation
- Diode Clippers: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)Document8 pagesDiode Clippers: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)syed02Pas encore d'évaluation
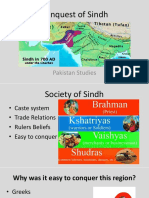
- Conquest of Sindh: Pakistan StudiesDocument11 pagesConquest of Sindh: Pakistan Studiessyed02Pas encore d'évaluation
- Power Supply Filters: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)Document9 pagesPower Supply Filters: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)syed02Pas encore d'évaluation
- Diode Applications in DC Power SuppliesDocument13 pagesDiode Applications in DC Power Suppliessyed02Pas encore d'évaluation
- Zener Diode: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)Document8 pagesZener Diode: Muhammad Adeel M.Sc. Electronics (KU) M.Phil. ISPA (KU)syed02Pas encore d'évaluation
- 02 PN JunctionDocument13 pages02 PN Junctionsyed02Pas encore d'évaluation
- Fall of Mughal Empire CausesDocument19 pagesFall of Mughal Empire Causessyed02Pas encore d'évaluation
- Agendas For The Session:: Writing Practice For: Pre Writing Body ParagraphDocument16 pagesAgendas For The Session:: Writing Practice For: Pre Writing Body Paragraphsyed02Pas encore d'évaluation
- Muslim Rule in India 712-1857Document29 pagesMuslim Rule in India 712-1857Sher Zaman Bhutto79% (43)
- Academic Vs Non-Academic Ariting-Essay ProcessDocument30 pagesAcademic Vs Non-Academic Ariting-Essay Processsyed02Pas encore d'évaluation
- Pointers to variables and arraysDocument10 pagesPointers to variables and arraysCyaramarPas encore d'évaluation
- Fall of Mughal Empire CausesDocument19 pagesFall of Mughal Empire Causessyed02Pas encore d'évaluation
- Lecture+15+ StructuresDocument26 pagesLecture+15+ Structuressyed02Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Quartus II Functional vs. Timing Simulations GuideDocument1 pageQuartus II Functional vs. Timing Simulations GuideGurpreet DhillonPas encore d'évaluation
- Returned Receipt For Equipment: Land Transportation OfficeDocument68 pagesReturned Receipt For Equipment: Land Transportation Officemaricris punayPas encore d'évaluation
- SGTL5000 QFN32Document73 pagesSGTL5000 QFN32yamaha640Pas encore d'évaluation
- Mi 10T Lite: User GuideDocument10 pagesMi 10T Lite: User GuideMUHAMMED RASHIDPas encore d'évaluation
- Step by Step To Repair MainboardDocument21 pagesStep by Step To Repair MainboardfabiobonadiaPas encore d'évaluation
- Pulse Counter Wireless Building TechDocument1 pagePulse Counter Wireless Building TechDavid SchmidtPas encore d'évaluation
- Manual DVD Philips MCD710Document44 pagesManual DVD Philips MCD710mekismeiPas encore d'évaluation
- SD / HD Production Switcher: Configuration & Ordering InformationDocument35 pagesSD / HD Production Switcher: Configuration & Ordering Informationjhon hernandezPas encore d'évaluation
- SITRAIN Training For Automation and Indu PDFDocument31 pagesSITRAIN Training For Automation and Indu PDFQuách Ngọc Huy100% (1)
- Subscriber Loop DesignDocument3 pagesSubscriber Loop DesignNaila NaseerPas encore d'évaluation
- HK AVR 161S Spec Sheet EnglishDocument3 pagesHK AVR 161S Spec Sheet EnglishlovelyshreePas encore d'évaluation
- Virtual DJ Skin Pioneer CDJ 2000 DJM 800 1024x768 Mietwohnung Horoscop PDFDocument3 pagesVirtual DJ Skin Pioneer CDJ 2000 DJM 800 1024x768 Mietwohnung Horoscop PDFMark100% (1)
- Andrew DBXLH 6565d VTMDocument4 pagesAndrew DBXLH 6565d VTMHenry FloresPas encore d'évaluation
- Typical KNX GRMS With IPDocument1 pageTypical KNX GRMS With IPNATHANPas encore d'évaluation
- Purple Finder PDFDocument12 pagesPurple Finder PDFsahil jadonPas encore d'évaluation
- Cdt5167d Vibe Em1000 Multi-Channel SD EncoderDocument2 pagesCdt5167d Vibe Em1000 Multi-Channel SD EncoderRobertPas encore d'évaluation
- Instructions: PG Speed Control Card Pg-X2Document19 pagesInstructions: PG Speed Control Card Pg-X2Mehedi HasanPas encore d'évaluation
- Design, Simulation and Fabrication of CubeSat Antenna SystemsDocument102 pagesDesign, Simulation and Fabrication of CubeSat Antenna SystemsAnonymous zBSE9MPas encore d'évaluation
- AC/DC Power Supply SeriesDocument16 pagesAC/DC Power Supply SeriesAmir ZozoPas encore d'évaluation
- MCQ Xbee3Document11 pagesMCQ Xbee3Alexsandro Roberto TeixeiraPas encore d'évaluation
- Chisel BookDocument34 pagesChisel BookGuoli LvPas encore d'évaluation
- Solo BrochureDocument20 pagesSolo BrochurePitarakis NikosPas encore d'évaluation
- A Step Down Transformerless Single Switch Integerated Buck and Buck-Boost ConverterDocument7 pagesA Step Down Transformerless Single Switch Integerated Buck and Buck-Boost ConverterMogal RajeshPas encore d'évaluation
- B777 GPS IssuesDocument337 pagesB777 GPS Issuespierph738Pas encore d'évaluation
- EdcDocument191 pagesEdcMurugan BalakrishnanPas encore d'évaluation
- Shunt ReactorDocument3 pagesShunt ReactorMichel FerreiraPas encore d'évaluation
- LANConf User ManualDocument28 pagesLANConf User ManualJosé Luis Mireles EspinozaPas encore d'évaluation
- How Does Trip Circuit Supervision WorkDocument3 pagesHow Does Trip Circuit Supervision WorkkarthikPas encore d'évaluation
- Assignment AASTUDocument6 pagesAssignment AASTUfiraol temesgenPas encore d'évaluation