Vous aimerez peut-être aussi
- Tema 45Document21 pagesTema 45JOSE DANIEL PEREZPas encore d'évaluation
- Tema 17Document32 pagesTema 17Jordi El MariachetPas encore d'évaluation
- Tema Instalaciones ElectrotecnicasDocument14 pagesTema Instalaciones ElectrotecnicasPablo NarvaezPas encore d'évaluation
- Tema 04Document26 pagesTema 04andaddkd0% (1)
- Tema 61 Academia Preparadores PDFDocument22 pagesTema 61 Academia Preparadores PDFjose alberto100% (1)
- Instalaciones Electrotecnicas PracticoDocument10 pagesInstalaciones Electrotecnicas PracticoRaul Sanchez RoyPas encore d'évaluation
- Tema 02Document22 pagesTema 02andaddkdPas encore d'évaluation
- Ejercicios Resueltos PDFDocument4 pagesEjercicios Resueltos PDFPablo TCPas encore d'évaluation
- Nave Industrial Oposición 2016 Madrid RDocument10 pagesNave Industrial Oposición 2016 Madrid RALfredo ROldanPas encore d'évaluation
- Procedimientos de Cálculo de Previsión de PotenciaDocument5 pagesProcedimientos de Cálculo de Previsión de PotenciaAntonio Herrerías SanabriaPas encore d'évaluation
- Examen Oposicion Sol1516Document13 pagesExamen Oposicion Sol1516ALfredo ROldanPas encore d'évaluation
- Zapatería Pública Concurrencia (R)Document18 pagesZapatería Pública Concurrencia (R)ALfredo ROldanPas encore d'évaluation
- Ejercicios-Resueltos Tematio o y P S eDocument4 pagesEjercicios-Resueltos Tematio o y P S eandres19712Pas encore d'évaluation
- Tema-01-Configuracion y Calculo de Instalaciones Electrotecnicas-Preparadores PDFDocument28 pagesTema-01-Configuracion y Calculo de Instalaciones Electrotecnicas-Preparadores PDFAlmudena Martín López100% (1)
- Explicacion de La Practica Publica ConcurrenciaDocument15 pagesExplicacion de La Practica Publica ConcurrenciaMaria planeller100% (1)
- 01 Resumido Conceptos y Fenomenos ElectricosDocument13 pages01 Resumido Conceptos y Fenomenos ElectricosManuel Uroz Sorroche100% (1)
- 0591-206 - INSTALACIONES ELECTROTÉCNICAS - Prueba - Practica - CASTILLA Y LEONDocument17 pages0591-206 - INSTALACIONES ELECTROTÉCNICAS - Prueba - Practica - CASTILLA Y LEONCristobalRuiz100% (1)
- Solucionario Configuracion de Instalaciones ElectricasDocument64 pagesSolucionario Configuracion de Instalaciones ElectricasPedro100% (2)
- 0590 125 SEA Prueba PracticaDocument8 pages0590 125 SEA Prueba PracticaJose F. ZapataPas encore d'évaluation
- Instalaciones Electrotecnicas Practico PDFDocument10 pagesInstalaciones Electrotecnicas Practico PDFellaneroPas encore d'évaluation
- Muestra Tema 18 Academia Preparadores de La Enseñanza PDFDocument32 pagesMuestra Tema 18 Academia Preparadores de La Enseñanza PDFLuisJoséCastillaRomero100% (3)
- 2 Configuracion de Instalaciones Electricas PDFDocument32 pages2 Configuracion de Instalaciones Electricas PDFRobinson BangueroPas encore d'évaluation
- 591 206 Instalaciones Electrotecnicas Examen Parte-A Prueba-1Document14 pages591 206 Instalaciones Electrotecnicas Examen Parte-A Prueba-1cesar bachiPas encore d'évaluation
- Cuaderno de Practicas Iniciacion A La ElectricidadDocument46 pagesCuaderno de Practicas Iniciacion A La ElectricidadJosé Luis Granero MontesinosPas encore d'évaluation
- Sistemas Electrotécnicos y Automáticos. Tema 20Document9 pagesSistemas Electrotécnicos y Automáticos. Tema 20Francisco de Paula González RodríguezPas encore d'évaluation
- Calculo Derivacion IndividualDocument3 pagesCalculo Derivacion IndividualJuan Antonio Gualda Garcia100% (1)
- Domotica Con Logo 1. Aplicaciones de IluminacionDocument24 pagesDomotica Con Logo 1. Aplicaciones de IluminacionChester Noel Brenes Aguirre75% (4)
- PTFP-IE PRECIOS PREPARACIÓN CLASES ON-LINE One To OneDocument3 pagesPTFP-IE PRECIOS PREPARACIÓN CLASES ON-LINE One To OneLuisJoséCastillaRomeroPas encore d'évaluation
- Principios Basicos de AutomatizacionDocument9 pagesPrincipios Basicos de AutomatizacionSarah Smith0% (1)
- Y Tioula LogoDocument37 pagesY Tioula LogoYassinePas encore d'évaluation
- Prácticas de Automatismos Industriales 2014 - 15Document31 pagesPrácticas de Automatismos Industriales 2014 - 15pepe100% (1)
- 1º Examen de La 2 Evaluación - Técnicas y Procesos en Infraestructura Común de TelecomunicacionesDocument3 pages1º Examen de La 2 Evaluación - Técnicas y Procesos en Infraestructura Común de TelecomunicacionesAntonio Herrerías SanabriaPas encore d'évaluation
- Solucionario IEyD 2018 PDFDocument90 pagesSolucionario IEyD 2018 PDFoscarPas encore d'évaluation
- Resumen Apuntes Instalaciones Enlace Rebt EjerciciosDocument484 pagesResumen Apuntes Instalaciones Enlace Rebt Ejerciciosargon300% (1)
- Ejercicios de Domótica Con LogoDocument2 pagesEjercicios de Domótica Con LogoxendikaPas encore d'évaluation
- AnkjlaDocument27 pagesAnkjlaYomin KatuongoPas encore d'évaluation
- Catalogo Paraninfo Electricidad y ElectrónicaDocument16 pagesCatalogo Paraninfo Electricidad y ElectrónicaelectroduendezPas encore d'évaluation
- Representacion de Esquemas PDFDocument26 pagesRepresentacion de Esquemas PDFdancord19100% (1)
- Esquema General de La ICTDocument1 pageEsquema General de La ICTE&GPas encore d'évaluation
- Ejemplos Varios de Instalaciones KNXDocument28 pagesEjemplos Varios de Instalaciones KNXRoberto VilottaPas encore d'évaluation
- Solucionario Maquinas Electricas 2021 UD1 PDFDocument6 pagesSolucionario Maquinas Electricas 2021 UD1 PDFIvan100% (1)
- Tema 11.-DomóticaDocument27 pagesTema 11.-DomóticapcpiCiempozuelos100% (1)
- Microsoft Word - Practicas KNX ISEFDocument59 pagesMicrosoft Word - Practicas KNX ISEFFdz Carlos100% (3)
- Tema 15 Bobinado y Conexionado TransformadoresDocument7 pagesTema 15 Bobinado y Conexionado TransformadoresLuisJoséCastillaRomero100% (1)
- Solucionario Electrotecnia ParaninfoDocument75 pagesSolucionario Electrotecnia ParaninfoCarlos Ruiz Cruz67% (3)
- Montaje y mantenimiento de instalaciones eléctricas de interior. ELEE0109D'EverandMontaje y mantenimiento de instalaciones eléctricas de interior. ELEE0109Pas encore d'évaluation
- Reparación de instalaciones automatizadas. ELEE0109D'EverandReparación de instalaciones automatizadas. ELEE0109Pas encore d'évaluation
- Actividad 3.1 y 3.2 de PLC Acticidad 2Document8 pagesActividad 3.1 y 3.2 de PLC Acticidad 2nilsongPas encore d'évaluation
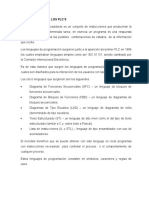
- Programación de AutómatasDocument7 pagesProgramación de AutómatasJose Granados BeberPas encore d'évaluation
- El Diagrama de Flujo Es Una Representación Gráfica de La Secuencia de Pasos Que Se Realizan para Obtener Un Cierto ResultadoDocument6 pagesEl Diagrama de Flujo Es Una Representación Gráfica de La Secuencia de Pasos Que Se Realizan para Obtener Un Cierto ResultadoJuanithoOjedaPas encore d'évaluation
- Objetivos GeneralesDocument112 pagesObjetivos Generalesjuan manuelPas encore d'évaluation
- P&C S2 AlgoritmosDocument48 pagesP&C S2 AlgoritmosDalma CruzadoPas encore d'évaluation
- Algoritmo, Pseudocódigo y Diagrama de FlujoDocument21 pagesAlgoritmo, Pseudocódigo y Diagrama de FlujoAdolfo SalazarPas encore d'évaluation
- Algoritmo y DiagramasDocument13 pagesAlgoritmo y DiagramasSarahi CostillaPas encore d'évaluation
- Presentación Lenguaje de Programación Plc-LadderDocument35 pagesPresentación Lenguaje de Programación Plc-LadderLuigi Ortega100% (2)
- Automatizacion InsdustrialDocument6 pagesAutomatizacion Insdustrialjhomer javier CrespoPas encore d'évaluation
- Bloques Funcionales Del PLC PDFDocument9 pagesBloques Funcionales Del PLC PDFKcho AnteloPas encore d'évaluation
- PLCDocument5 pagesPLCAlexandra chata monsalve momsalvePas encore d'évaluation
- Programación de Los PLCDocument8 pagesProgramación de Los PLCGabriel HerreraPas encore d'évaluation
- Algoritmos Computacionales - Unidad 1Document8 pagesAlgoritmos Computacionales - Unidad 1julio cesarPas encore d'évaluation
- Ficha Técnica SBA102 Serie - Ampl. de MastilDocument2 pagesFicha Técnica SBA102 Serie - Ampl. de MastilRaul Sanchez RoyPas encore d'évaluation
- Ej3 Teleco VERDocument45 pagesEj3 Teleco VEREsteban Jose Hontoria ArlandizPas encore d'évaluation
- Fagor ESDocument104 pagesFagor ESRaul Sanchez RoyPas encore d'évaluation
- Especificaciones ReceptoresTDT - BasicosDocument23 pagesEspecificaciones ReceptoresTDT - BasicosRaul Sanchez RoyPas encore d'évaluation
- Onda ElectromagneticaDocument33 pagesOnda ElectromagneticaemersonPas encore d'évaluation
- Tema3 Arc1Document91 pagesTema3 Arc1Hector Jose Murillo CordobaPas encore d'évaluation
- Muy Bueno Descripción Elementos y Problemas Antenas y Amplificadores PDFDocument19 pagesMuy Bueno Descripción Elementos y Problemas Antenas y Amplificadores PDFRaul Sanchez RoyPas encore d'évaluation
- Antena162 06C Reportaje La TDTDocument6 pagesAntena162 06C Reportaje La TDTAnonymous 6frfnBoUWPas encore d'évaluation
- Proyecto Tipo ICT v.2 RD 346 - 2011 PDFDocument224 pagesProyecto Tipo ICT v.2 RD 346 - 2011 PDFRaul Sanchez RoyPas encore d'évaluation
- TEMA 2. La Red Telefonica Conmutada. ESTRUCTURA Y CARACTERÍSTICAS PDFDocument38 pagesTEMA 2. La Red Telefonica Conmutada. ESTRUCTURA Y CARACTERÍSTICAS PDFRaul Sanchez RoyPas encore d'évaluation
- Antena162 06C Reportaje La TDTDocument6 pagesAntena162 06C Reportaje La TDTAnonymous 6frfnBoUWPas encore d'évaluation
- Ventajas y Desventajas de ModulacionDocument12 pagesVentajas y Desventajas de ModulacionRaul Sanchez RoyPas encore d'évaluation
- 06 ModulacionDocument14 pages06 ModulacionRaul Sanchez RoyPas encore d'évaluation
- Manual Promax TVExplorer2Document308 pagesManual Promax TVExplorer2Raul Sanchez RoyPas encore d'évaluation
- Manual Practicas AntenasDocument12 pagesManual Practicas AntenasRaul Sanchez RoyPas encore d'évaluation
- Practicas STFM 2 PDFDocument28 pagesPracticas STFM 2 PDFRaul Sanchez RoyPas encore d'évaluation
- Apuntes Ieldo Fpbasica 2014 2015Document113 pagesApuntes Ieldo Fpbasica 2014 2015ROBERTO1612Pas encore d'évaluation
- 06 ModulacionDocument19 pages06 ModulacionJulia BorgesPas encore d'évaluation
- 2017 OrganigramaDocument1 page2017 OrganigramaRaul Sanchez RoyPas encore d'évaluation
- Onda ElectromagneticaDocument33 pagesOnda ElectromagneticaemersonPas encore d'évaluation
- Onda ElectromagneticaDocument33 pagesOnda ElectromagneticaemersonPas encore d'évaluation
- Manual Practicas AntenasDocument35 pagesManual Practicas AntenasestroncioPas encore d'évaluation
- ICTV05 CONT R06 Recurso09Document14 pagesICTV05 CONT R06 Recurso09Raul Sanchez RoyPas encore d'évaluation
- TemaII1 VillapolDocument63 pagesTemaII1 VillapolIván IvanovPas encore d'évaluation
- Resumen de La Póliza de Seguro de Reembolso Por Daños PDFDocument2 pagesResumen de La Póliza de Seguro de Reembolso Por Daños PDFRaul Sanchez RoyPas encore d'évaluation
- Fagor ESDocument104 pagesFagor ESRaul Sanchez RoyPas encore d'évaluation
- CAP Extraord 09Document44 pagesCAP Extraord 09Raul Sanchez RoyPas encore d'évaluation
- 2º ITE Circuito Cerrado TV y Seguridad 16-17Document33 pages2º ITE Circuito Cerrado TV y Seguridad 16-17Raul Sanchez RoyPas encore d'évaluation
- Retribuciones Mensuales Personal Docente 2016 PDFDocument3 pagesRetribuciones Mensuales Personal Docente 2016 PDFRaul Sanchez RoyPas encore d'évaluation
- 1-FTEL-Apuntes A OrdenadorDocument313 pages1-FTEL-Apuntes A OrdenadorRaul Sanchez RoyPas encore d'évaluation
- Frade, LauraDocument9 pagesFrade, LauraCprofeticoPas encore d'évaluation
- Logica Algebra Boole M3Document36 pagesLogica Algebra Boole M3Mariano Nicolás ZalazarPas encore d'évaluation
- Comentario de Texto CMC ResueltoDocument7 pagesComentario de Texto CMC ResueltoMarina PatrónPas encore d'évaluation
- BalbuceoDocument2 pagesBalbuceoodiliePas encore d'évaluation
- Juego de Los Vasos Locos PDFDocument22 pagesJuego de Los Vasos Locos PDFRoss CaceresPas encore d'évaluation
- EmdcsDocument15 pagesEmdcsrfloreslechaPas encore d'évaluation
- SA n?2 LCL 3?Document36 pagesSA n?2 LCL 3?Verónica PPas encore d'évaluation
- Refuerzo Cs. Socilales Chile U3L1Document6 pagesRefuerzo Cs. Socilales Chile U3L1Andreita Saavedra SandovalPas encore d'évaluation
- Actividades Tartamudez PiluDocument2 pagesActividades Tartamudez PiluMónica DGPas encore d'évaluation
- Lenguaje RPGDocument17 pagesLenguaje RPGJuan LamaPas encore d'évaluation
- Cena14831esc 001Document332 pagesCena14831esc 00152783512Pas encore d'évaluation
- Drive Into DangerDocument7 pagesDrive Into DangerCarlos Alejandro Pino Araya67% (3)
- Aprendizaje VisualDocument19 pagesAprendizaje VisualMauricioJavierTorresPas encore d'évaluation
- OfaDocument1 pageOfaCamila CabezasPas encore d'évaluation
- Panza LeoDocument12 pagesPanza LeoJimmy SánchezPas encore d'évaluation
- Límites IndeterminadosDocument54 pagesLímites IndeterminadosRhaiza Meneses0% (1)
- CaminarDocument4 pagesCaminarÆdin ChenPas encore d'évaluation
- Reglamento APADocument11 pagesReglamento APAPatiko MéndezPas encore d'évaluation
- Como Leer La Biblia Eficaz Mente - Fee - ResumenDocument120 pagesComo Leer La Biblia Eficaz Mente - Fee - Resumenenoc4100% (2)
- 2006 EXT Examen Lengua Castellana y Literatura de La Comunidad Valenciana (Extraordinaria de 2006) (WWW - Examenesdepau.com)Document2 pages2006 EXT Examen Lengua Castellana y Literatura de La Comunidad Valenciana (Extraordinaria de 2006) (WWW - Examenesdepau.com)Zaira Rey JuanPas encore d'évaluation
- GUÍA LENGUA 6TO 04 Al 08 de MayolDocument10 pagesGUÍA LENGUA 6TO 04 Al 08 de MayolSamuPas encore d'évaluation
- Guide Palabras Agudas Graves y EsdrujulasDocument7 pagesGuide Palabras Agudas Graves y EsdrujulasSebastián Marcelo88% (8)
- 1 Libro Intensivo EspanholDocument95 pages1 Libro Intensivo EspanholLayris LimaPas encore d'évaluation
- Identificadores y VariablesDocument19 pagesIdentificadores y VariablesAlejandra RomeroPas encore d'évaluation
- 4° Año. Semana 7. MATEMÁTICA. Guía 6Document6 pages4° Año. Semana 7. MATEMÁTICA. Guía 6Lapicito PencoPas encore d'évaluation
- Test 1Document27 pagesTest 1Sammy TumbacoPas encore d'évaluation
- Metafísica de La Belleza y Estética de La Luz en Marsilio FicinoDocument52 pagesMetafísica de La Belleza y Estética de La Luz en Marsilio Ficinoviruzuriv100% (1)
- Republica Bolivariana de VenezuelaDocument5 pagesRepublica Bolivariana de VenezuelaAlba SanchezPas encore d'évaluation
- 3.-Texto ArgumentativoDocument14 pages3.-Texto Argumentativoxavier mendozaPas encore d'évaluation
- Formato ApaDocument12 pagesFormato ApaHéctor Quincho Zevallos100% (1)