Vous aimerez peut-être aussi
- What's NewDocument1 pageWhat's NewĐăngQuangPas encore d'évaluation
- Session 02-WTC PPT, Jan 14Document23 pagesSession 02-WTC PPT, Jan 14ĐăngQuangPas encore d'évaluation
- A Way To TradeDocument3 pagesA Way To TradeĐăngQuangPas encore d'évaluation
- Plustek Opticslim 550 Plus: An Ultra Slim and Compact Designed Front Desk ScannerDocument2 pagesPlustek Opticslim 550 Plus: An Ultra Slim and Compact Designed Front Desk ScannerĐăngQuangPas encore d'évaluation
- Gate State Description I0.0 Input Sensor I0.1 Input Stop Q0.0 Output Valve 1 Q0.1 Output Valve 2 Q0.2 Output Valve 3Document2 pagesGate State Description I0.0 Input Sensor I0.1 Input Stop Q0.0 Output Valve 1 Q0.1 Output Valve 2 Q0.2 Output Valve 3ĐăngQuangPas encore d'évaluation
- V4 I3201599 A 93Document9 pagesV4 I3201599 A 93ĐăngQuangPas encore d'évaluation
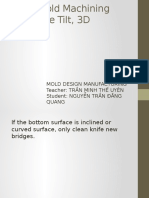
- Mold Design Manufacturing Teacher: Trần Minh Thế Uyên Student: Nguyễn Trần Đăng QuangDocument8 pagesMold Design Manufacturing Teacher: Trần Minh Thế Uyên Student: Nguyễn Trần Đăng QuangĐăngQuangPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Trial and Error: Failure and Innovation in Criminal Justice ReformDocument5 pagesTrial and Error: Failure and Innovation in Criminal Justice ReformAzim MohammedPas encore d'évaluation
- Agroforestry: A Sustainable Land-Use System For Food and WoodDocument72 pagesAgroforestry: A Sustainable Land-Use System For Food and WoodAlok PatraPas encore d'évaluation
- Abu Dhabi Certification Scheme For Assistant EngineerDocument12 pagesAbu Dhabi Certification Scheme For Assistant EngineersureshPas encore d'évaluation
- 1743 LKWActrosXXXXXX 954frDocument4 pages1743 LKWActrosXXXXXX 954frgeothermal3102100% (1)
- Theory: Figure 1: The Exit Age Distribution Curve E For Fluid Flowing Through A Vessel Also Called The Residence TimeDocument5 pagesTheory: Figure 1: The Exit Age Distribution Curve E For Fluid Flowing Through A Vessel Also Called The Residence Timeiko856Pas encore d'évaluation
- Physics 23 Fall 1993 Lab 2 - Adiabatic Processes: PV NRTDocument13 pagesPhysics 23 Fall 1993 Lab 2 - Adiabatic Processes: PV NRTvipul ch v v n s sPas encore d'évaluation
- MARTA: 2012 KPMG Phase II Final DraftDocument114 pagesMARTA: 2012 KPMG Phase II Final DraftthomaswheatleyPas encore d'évaluation
- Sand Reclamation - Standard Devices: Shake Out MachinesDocument2 pagesSand Reclamation - Standard Devices: Shake Out MachinesKaarthicNatarajanPas encore d'évaluation
- INTEC 2019 User Manual PDFDocument30 pagesINTEC 2019 User Manual PDFshriramsusindarPas encore d'évaluation
- Yuli's PPT FloralDocument28 pagesYuli's PPT FloralYuli MyeshaPas encore d'évaluation
- CATALOGO DE VALVULAS OsvatDocument218 pagesCATALOGO DE VALVULAS OsvatGabriel Piñon Conde67% (3)
- Workover Kill Fluid Density CalculationDocument3 pagesWorkover Kill Fluid Density CalculationSanny Astari100% (1)
- How To Use MySQL With ErlangDocument2 pagesHow To Use MySQL With ErlangarthurbulivaPas encore d'évaluation
- 5 Blasting Limit GuidelinesDocument7 pages5 Blasting Limit GuidelinesTry Oka Afandy SinagaPas encore d'évaluation
- Role of Technology in AdvertisementtDocument29 pagesRole of Technology in AdvertisementtShalini ChatterjeePas encore d'évaluation
- Illumination: "The Established Leader Ee Review"Document6 pagesIllumination: "The Established Leader Ee Review"IVex Brykz Jay Ro60% (5)
- 3BSE035980-600 A en System 800xa Control 6.0 AC 800M Configuration PDFDocument580 pages3BSE035980-600 A en System 800xa Control 6.0 AC 800M Configuration PDFWaqas AnjumPas encore d'évaluation
- Presentation On Optical Signal To Noise RatioDocument6 pagesPresentation On Optical Signal To Noise RatioReg NdhlovuPas encore d'évaluation
- A Car Parking Guard Circuit Using Infrared SensorDocument9 pagesA Car Parking Guard Circuit Using Infrared Sensorhamed razaPas encore d'évaluation
- Sap Accrual EngineDocument2 pagesSap Accrual Enginerohit12345aPas encore d'évaluation
- Acquisition (Pagtamo) Meaning-Making (Pag-Unawa) Transfer (Paglilipat)Document2 pagesAcquisition (Pagtamo) Meaning-Making (Pag-Unawa) Transfer (Paglilipat)MAY BEVERLY MORALES100% (8)
- Chapter 13: Worksheet Mark SchemeDocument2 pagesChapter 13: Worksheet Mark SchemeAdam DanialPas encore d'évaluation
- Domain Controllers and Active DirectoryDocument121 pagesDomain Controllers and Active Directoryjamesmcd05100% (1)
- GCC TutorialDocument4 pagesGCC Tutorialistanbulizma5803100% (5)
- PC210-240-7K M Ueam001704 PC210 PC230 PC240-7K 0310 PDFDocument363 pagesPC210-240-7K M Ueam001704 PC210 PC230 PC240-7K 0310 PDFCarlos Israel Gomez100% (10)
- Canalta Parts CatalogueDocument25 pagesCanalta Parts Cataloguellando1Pas encore d'évaluation
- DPP Series 1 PDFDocument1 pageDPP Series 1 PDFsukainaPas encore d'évaluation
- 440T4 4T60 4t60e 4t65eDocument24 pages440T4 4T60 4t60e 4t65eFTompkins73100% (4)
- NB! This Price List Applies To Service Agreements, That Are Concluded With Nordea Bank AB Latvia BranchDocument34 pagesNB! This Price List Applies To Service Agreements, That Are Concluded With Nordea Bank AB Latvia Branchwaraxe23Pas encore d'évaluation
- SWIMS Directory of LibrariesDocument17 pagesSWIMS Directory of LibrariessudakshinaroyPas encore d'évaluation