Vous aimerez peut-être aussi
- Examples of Colvars-based protocols: Association of polyleucine peptidesDocument5 pagesExamples of Colvars-based protocols: Association of polyleucine peptidesJorge Ramón Cantero PiñénezPas encore d'évaluation
- DiodeDocument22 pagesDiodeSaurabh Mittal100% (1)
- BackpropagationDocument8 pagesBackpropagationnigel989Pas encore d'évaluation
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningD'EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningPas encore d'évaluation
- Multi-Layer Feed-Forward NetworksDocument6 pagesMulti-Layer Feed-Forward NetworksVishnu DasPas encore d'évaluation
- ECSE 420 - Parallel Cholesky Algorithm - ReportDocument17 pagesECSE 420 - Parallel Cholesky Algorithm - ReportpiohmPas encore d'évaluation
- Some Lattice-Based Scientic Problems, Expressed in HaskellDocument23 pagesSome Lattice-Based Scientic Problems, Expressed in HaskellRaghu Nandan ChilukuriPas encore d'évaluation
- Fancier Version PhysicsDocument4 pagesFancier Version Physicsmuhammad azizPas encore d'évaluation
- Module 3.2 Time Series Forecasting LSTM ModelDocument23 pagesModule 3.2 Time Series Forecasting LSTM ModelDuane Eugenio AniPas encore d'évaluation
- Chapter 8 Practical Introduction To Rigid Body Linear Complementary Problem (LCP) Constraint SolversDocument43 pagesChapter 8 Practical Introduction To Rigid Body Linear Complementary Problem (LCP) Constraint SolversjohnsmithiPas encore d'évaluation
- The Cascade-Correlation Learning Architecture: Scott E. Fahlman and Christian LebiereDocument14 pagesThe Cascade-Correlation Learning Architecture: Scott E. Fahlman and Christian LebiereSylvia VassilevaPas encore d'évaluation
- Digital Neural Networks: Tony R. MartinezDocument8 pagesDigital Neural Networks: Tony R. MartinezzaqweasPas encore d'évaluation
- Deep Learning in Astronomy: Classifying GalaxiesDocument6 pagesDeep Learning in Astronomy: Classifying GalaxiesAniket SujayPas encore d'évaluation
- 11.7 Improving Eigenvalues And/or Finding Eigenvectors by Inverse IterationDocument3 pages11.7 Improving Eigenvalues And/or Finding Eigenvectors by Inverse IterationVinay GuptaPas encore d'évaluation
- Cp5191 MLT Unit IIDocument27 pagesCp5191 MLT Unit IIbala_07123Pas encore d'évaluation
- Unit 2Document10 pagesUnit 2Lakshmi Nandini MentePas encore d'évaluation
- Lumped Element ModelDocument6 pagesLumped Element ModelLuis PressoPas encore d'évaluation
- Chapter 5Document24 pagesChapter 5Facepaz DarPas encore d'évaluation
- A Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowDocument4 pagesA Computational Comparison of Two Different Approaches To Solve The Multi-Area Optimal Power FlowFlores JesusPas encore d'évaluation
- Comparative Analysis of KL and SA Partitioning Algorithms Implemented On VLSI Circuit PartitioningDocument7 pagesComparative Analysis of KL and SA Partitioning Algorithms Implemented On VLSI Circuit Partitioningwww.irjes.comPas encore d'évaluation
- Visualizing and Understanding Convolutional Networks with DeconvolutionDocument16 pagesVisualizing and Understanding Convolutional Networks with DeconvolutionVaibhav JainPas encore d'évaluation
- A Method To Calculate Correlation For Density Functional Theory On A Quantum ProcessorDocument12 pagesA Method To Calculate Correlation For Density Functional Theory On A Quantum ProcessoriviPas encore d'évaluation
- DATA SCIENCE INTERVIEW PREPARATION: V-NET ARCHITECTURE FOR BIOMEDICAL IMAGE SEGMENTATIONDocument16 pagesDATA SCIENCE INTERVIEW PREPARATION: V-NET ARCHITECTURE FOR BIOMEDICAL IMAGE SEGMENTATIONJulian TolosaPas encore d'évaluation
- Data Science Interview Preparation (# DAY 22)Document16 pagesData Science Interview Preparation (# DAY 22)ARPAN MAITYPas encore d'évaluation
- DATA SCIENCE INTERVIEW PREPARATION: V-NET ARCHITECTURE FOR BIOMEDICAL IMAGE SEGMENTATIONDocument16 pagesDATA SCIENCE INTERVIEW PREPARATION: V-NET ARCHITECTURE FOR BIOMEDICAL IMAGE SEGMENTATIONThànhĐạt NgôPas encore d'évaluation
- NN AND DEEP LEARNING INSIGHTSDocument82 pagesNN AND DEEP LEARNING INSIGHTSMario CordinaPas encore d'évaluation
- Inverse Optimal Control With Linearly-Solvable MDPsDocument8 pagesInverse Optimal Control With Linearly-Solvable MDPsAkustika HorozPas encore d'évaluation
- Moeschler Philippe - High-Level Modeling Using 20070126 PDFDocument6 pagesMoeschler Philippe - High-Level Modeling Using 20070126 PDFSrinivas CherukuPas encore d'évaluation
- Understanding Backpropagation Algorithm - Towards Data ScienceDocument11 pagesUnderstanding Backpropagation Algorithm - Towards Data ScienceKashaf BakaliPas encore d'évaluation
- Maxwell's Equations and Vector Algebra BasicsDocument9 pagesMaxwell's Equations and Vector Algebra BasicsMukesh Kumar MeenaPas encore d'évaluation
- Maxwell's Equations and Vector Algebra BasicsDocument9 pagesMaxwell's Equations and Vector Algebra Basicskunal chetryPas encore d'évaluation
- Condensed Matter Physics Lecture 7 Energy BandsDocument6 pagesCondensed Matter Physics Lecture 7 Energy BandsJay Stinson Kalinani67% (3)
- Optimal Brain Damage: 598 Le Cun, Denker and SollaDocument8 pagesOptimal Brain Damage: 598 Le Cun, Denker and Sollahugo pPas encore d'évaluation
- CALU: A Communication Optimal LU Factorization Algorithm: James Demmel Laura Grigori Hua XiangDocument37 pagesCALU: A Communication Optimal LU Factorization Algorithm: James Demmel Laura Grigori Hua Xiangk6mayPas encore d'évaluation
- Understanding Neural Networks From ScratchDocument15 pagesUnderstanding Neural Networks From Scratchsurajdhunna100% (1)
- Institute of Informatics and Applied Mathematics - University of Berne Neubr Uckstrasse 10, CH-3012 Berne, Switzerland Mousset@iam - Unibe.chDocument6 pagesInstitute of Informatics and Applied Mathematics - University of Berne Neubr Uckstrasse 10, CH-3012 Berne, Switzerland Mousset@iam - Unibe.chFiveRainDropsPas encore d'évaluation
- Losses Epsr 1998Document6 pagesLosses Epsr 1998Gabriel AlvarengaPas encore d'évaluation
- Major Classes of Neural NetworksDocument21 pagesMajor Classes of Neural Networksbhaskar rao mPas encore d'évaluation
- IJCNN 1993 Proceedings Comparison Pruning Neural NetworksDocument6 pagesIJCNN 1993 Proceedings Comparison Pruning Neural NetworksBryan PeñalozaPas encore d'évaluation
- Future Scope and ConclusionDocument13 pagesFuture Scope and ConclusionGourab PalPas encore d'évaluation
- E-Eli5-Way-3bd2b1164a53: CNN (Source:)Document4 pagesE-Eli5-Way-3bd2b1164a53: CNN (Source:)Mohit SinghalPas encore d'évaluation
- Unscented Kalmana FilterDocument6 pagesUnscented Kalmana FilterImrul AshrafPas encore d'évaluation
- Dynamics of Galaxies and Clusters of GalaxiesDocument48 pagesDynamics of Galaxies and Clusters of GalaxiespjblkPas encore d'évaluation
- Christophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailDocument4 pagesChristophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailNeil John AppsPas encore d'évaluation
- Advanced Character Physics: Thomas JakobsenDocument19 pagesAdvanced Character Physics: Thomas JakobsenalphasigmadeltaPas encore d'évaluation
- Physics of Cognition: Complexity and Creativity: T E P JDocument12 pagesPhysics of Cognition: Complexity and Creativity: T E P JurrrrPas encore d'évaluation
- Multilayer Neural Network ExplainedDocument9 pagesMultilayer Neural Network ExplaineddebmatraPas encore d'évaluation
- Deconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DateDocument36 pagesDeconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DatesahibhaiPas encore d'évaluation
- Backpropagation - Wikipedia, The Free EncyclopediaDocument10 pagesBackpropagation - Wikipedia, The Free EncyclopediaNinni SinghPas encore d'évaluation
- B.T. Sutcliffe and J. Tennyson - The Construction and Fitting of Molecular Potential Energy Surfaces and Their Use in Vibration-Rotation CalculationsDocument14 pagesB.T. Sutcliffe and J. Tennyson - The Construction and Fitting of Molecular Potential Energy Surfaces and Their Use in Vibration-Rotation CalculationsMaxnamewPas encore d'évaluation
- Cooperative Learning in Neural Networks Using Particle Swarm OptimizersDocument8 pagesCooperative Learning in Neural Networks Using Particle Swarm OptimizersAnish DesaiPas encore d'évaluation
- Algebraic Invariants For Linear Hybrid Automata: Rupak MajumdarDocument14 pagesAlgebraic Invariants For Linear Hybrid Automata: Rupak MajumdarToghrul KarimovPas encore d'évaluation
- A Study of Neural Network Algorithms: Namrata AnejaDocument3 pagesA Study of Neural Network Algorithms: Namrata Anejawww.irjes.comPas encore d'évaluation
- LipsolDocument26 pagesLipsolCmpt CmptPas encore d'évaluation
- Neural Networks - LearningDocument26 pagesNeural Networks - Learningoletoro14Pas encore d'évaluation
- Multilayer Networks and The Backpropagation AlgorithmDocument4 pagesMultilayer Networks and The Backpropagation AlgorithmVanshika MehrotraPas encore d'évaluation
- CNN Notes on Convolutional Neural NetworksDocument8 pagesCNN Notes on Convolutional Neural NetworksGiri PrakashPas encore d'évaluation
- Assignment - 4Document24 pagesAssignment - 4Durga prasad TPas encore d'évaluation
- Awe Fewaceaf Sdfwaefc3w32c D23cwecds23vr Fcwe34c 3fv3rf3fDocument1 pageAwe Fewaceaf Sdfwaefc3w32c D23cwecds23vr Fcwe34c 3fv3rf3fAntonius Dennis TPas encore d'évaluation
- RtbeDocument1 pageRtbeAntonius Dennis TPas encore d'évaluation
- Bgvu6tvibgvtyrf7tbhbo Gyuk897yiku8y78onuio Ny89bujjkbt6gbhjnhur Nhyui78bhkDocument1 pageBgvu6tvibgvtyrf7tbhbo Gyuk897yiku8y78onuio Ny89bujjkbt6gbhjnhur Nhyui78bhkAntonius Dennis TPas encore d'évaluation
- Jnopbgjhnbin Dhvdfgsfsdgrverver Cdssaervevadsavav VarDocument1 pageJnopbgjhnbin Dhvdfgsfsdgrverver Cdssaervevadsavav VarAntonius Dennis TPas encore d'évaluation
- MA-t NeededDocument1 pageMA-t NeededAntonius Dennis TPas encore d'évaluation
- Makovicka 2Document8 pagesMakovicka 2Antonius Dennis TPas encore d'évaluation
- Daspu NNDocument2 pagesDaspu NNAntonius Dennis TPas encore d'évaluation
- Correlation Study and Regression Analysis of Water Quality Assessment of Nagpur City, IndiaDocument5 pagesCorrelation Study and Regression Analysis of Water Quality Assessment of Nagpur City, IndiaShakeel AhmadPas encore d'évaluation
- FH400 73158464 Pca-6.140Document431 pagesFH400 73158464 Pca-6.140IgorGorduz100% (1)
- As ISO 128.23-2005 Technical Drawings - General Principles of Presentation Lines On Construction DrawingsDocument9 pagesAs ISO 128.23-2005 Technical Drawings - General Principles of Presentation Lines On Construction DrawingsSAI Global - APAC0% (3)
- Thinking ForthDocument311 pagesThinking ForthCristianPas encore d'évaluation
- DEA R ScriptsDocument3 pagesDEA R ScriptsFrancisco SilvaPas encore d'évaluation
- 050, 051Document28 pages050, 051kefaja67% (3)
- Classification of FluidDocument29 pagesClassification of FluidAbdur RehmanPas encore d'évaluation
- Computaris - Top Testing Suite (Quick Demonstration)Document10 pagesComputaris - Top Testing Suite (Quick Demonstration)ioana_diaPas encore d'évaluation
- Sru Flow DiagramDocument1 pageSru Flow Diagrampppppp5Pas encore d'évaluation
- Artificial LiftDocument18 pagesArtificial LiftRasya RefanPas encore d'évaluation
- J 1 B 1211 CCDDocument3 pagesJ 1 B 1211 CCDRegion 51Pas encore d'évaluation
- ZXONE Quick Installation Guide - V1.0Document56 pagesZXONE Quick Installation Guide - V1.0kmad100% (2)
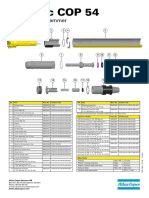
- 9853 1239 01 - COP 54 Service Poster - LOWDocument1 page9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasPas encore d'évaluation
- Department of Mechanical Engineering, Uet Lahore Refrigeration and Air Conditioning LaboratoryDocument7 pagesDepartment of Mechanical Engineering, Uet Lahore Refrigeration and Air Conditioning LaboratoryTauQeer ShahPas encore d'évaluation
- Wireless Mouse m325 Quick Start GuideDocument2 pagesWireless Mouse m325 Quick Start GuideFabolos 9Pas encore d'évaluation
- Roebuck 1942Document12 pagesRoebuck 1942Imam Saja DechPas encore d'évaluation
- Wacker Neuson-Dpu - 25 KNDocument3 pagesWacker Neuson-Dpu - 25 KNMilutin BožovićPas encore d'évaluation
- Physics Lab ReportDocument2 pagesPhysics Lab ReportFelix SonsunPas encore d'évaluation
- Unit-I: Introduction To J2EEDocument29 pagesUnit-I: Introduction To J2EEsurakshaPas encore d'évaluation
- 2014 Solder Joint ReliabilityDocument18 pages2014 Solder Joint ReliabilitychoprahariPas encore d'évaluation
- JDA SCE Standard Release NotesDocument3 pagesJDA SCE Standard Release Notesgolcha_edu532Pas encore d'évaluation
- Challenges in PavementsDocument23 pagesChallenges in PavementsSomeshwar Rao ThakkallapallyPas encore d'évaluation
- A320 Aircraft CharacteristicsDocument387 pagesA320 Aircraft CharacteristicsEder LucianoPas encore d'évaluation
- Airflex 728 Vinyl Acetate-Ethylene Copolymer Modified With Vinyl ChlorideDocument2 pagesAirflex 728 Vinyl Acetate-Ethylene Copolymer Modified With Vinyl ChlorideNissim Hazar CasanovaPas encore d'évaluation
- Civil 3 8sem PDFDocument43 pagesCivil 3 8sem PDFG0utham100% (1)
- Minor Project Report On Efficiency Improvement of A Combined Cycle Power PlantDocument40 pagesMinor Project Report On Efficiency Improvement of A Combined Cycle Power PlantArpit Garg100% (1)
- PVT Correlations McCain - ValkoDocument17 pagesPVT Correlations McCain - ValkoAlejandra Maleja RivasPas encore d'évaluation
- AS1895/7 E-FLEX Sealing Solutions: Part Number AS1895/7 Reference Duct Size Seal DimensionsDocument1 pageAS1895/7 E-FLEX Sealing Solutions: Part Number AS1895/7 Reference Duct Size Seal DimensionsAlex Zambrana RodríguezPas encore d'évaluation
- Stressman Engineering - Brochure Norway 2018-6Document8 pagesStressman Engineering - Brochure Norway 2018-6FelipePas encore d'évaluation