International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 4 Issue: 3
ISSN: 2321-8169
347 - 349
_______________________________________________________________________________________
Autonomous underground water detection Robot
Ronak Rathod
Prof. K. Venkatasubramanian
School of Electronics Engineering
Vellore Institute of Technology, Chennai Campus.
Chennai, India
E-mail: rathodronak.kishorbhai2015@vit.ac.in
School of Electronics Engineering
Vellore Institute of Technology, Chennai Campus
Chennai, India
E-mail: venkatasubramanian.k@vit.ac.in
Abstract India is one of the most water challenged countries in the world. Water demand is continuously increasing day by day, as peoples
demand of water for different household and industrial purpose is increasing. Due to this, surface water is not able to meet the demands of water
supply. Due to this need of underground water has increased. This work is focused to meet the challenge of finding out underground water in a
simple way with the help of robot. This Arduino based robot would analyze the surface using Wenner method to find the presence of water body
under the earth surface. Global Positioning System (GPS) attached to robot will send location of underground water to operator who is taking
note of readings of water level. The data received during analysis will be fed through a program which will follow logic and store the amount of
water present at that particular depth. This data will help to plot the map of where underground water is available in sufficient quantity.
Keywords- ArduinoBoard,wenner method, underground water,dc motor,gps,servo motor
__________________________________________________*****_________________________________________________
I. INTRODUCTION
Water scarcity is a new challenge that is going to dawn upon
in the near future. The only way to get over this water problem
is by replenishing the underground water table. The current
projects of rain water harvesting in metro cities have a
limitation on the amount of water that can be processed,
filtered and stored. Ground water resource gets recharged
through the precipitation in the monsoon season in India. The
annual natural groundwater recharge from rainfall in India is
about 342.43 km3, which is 8.56% of total annual rainfall of
the country. The annual groundwater recharge from canal
irrigation system is about 89.46 km3 (7).This project aims at
finding underground water bodies (1).It involves making a
robot which can detect underground water sources (water
pockets) in and around water logging areas or in lakes, so that
during the onset of monsoon a hole can be drilled in the
ground to let all the water being collected (because of the
draining from the city or residential areas to be fed directly to
the underground storage.
Where a is resistivity measured in ohm-cm, a is the space
between electrodes; R is the resistance value in Ohm. (4) The
resistance of soil will change as the spacing between electrodes
is increased
II. METHODOLOGY
The work is going to deploy Wenner method to detect any
underground water source (2). The Wenner method is about
keeping four electrodes collinear to each other. The four
electrodes considered are D1, E1, D2, E2. D1 and D2 electrode
will supply current externally at two ends. Between that two
electrodes E1 and E2 electrodes are fixed which gives reading
of voltage across soil (4).The distance between all four
electrodes should be same. The readings are measured by
voltmeter connected to electrodes E1 and E2 (5) .This readings
are converted in resistance form by ohms law. This resistance is
not proper resistance that of the soil. Soil is having
heterogeneous layers so for that apparent resistivity is to be
calculated. Apparent resistivity is given by simple formula
a= 2*3.14*a*R
(1)
Fig.1 Block diagram
It is having one servo motor fixed at front end of it.Servo motor
is programmed for 90 degree rotation. So for 0 degree rod
attached to servo motor will stay up in the air and after 90
degree rotation rod attached with servo motors will insert
electrodes into soil which are fixed on it .Servo motor has three
outputs. One output is connected with pin 9 of Arduino board
and other two are connected to ground and Vcc of board. All
four electrodes on servomotor are fixed at equal spacing of a
347
IJRITCC | March 2016, Available @ http://www.ijritcc.org
______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 4 Issue: 3
ISSN: 2321-8169
347 - 349
_______________________________________________________________________________________
between them. It is working on Arduino Atmega2560 board.
This board has 54 I/O pins and 16 analog input pins. Board
runs on 5v dc supply. It has one 16 MHz crystal oscillator. It
has four sets of serial transmission and receiver pins. Robot is
having two 300 rpm dc motors driven by L293D motor driver
IC at back end of it. One motor is connected with pin3 and pin6
of driver IC. Other motor is connected at pin 14 and pin 11 of
driver IC. Pins 2, 7, 10, 15 of driver IC are connected with
10,11,12,13 pins of Arduino board. This driver IC is provided
with external dc supply from 9V battery. A GPS module
having internal antenna is attached to the Arduino board. Its
receiver and transmission output is connected with transmission
1 and receiver 1 pin of Arduino board respectively. Two
electrodes D1 and D2 will be given external supply of current
through battery. Another two electrodes E1 and E2 are there, of
them one is connected to ground of Arduino and other to the
analog input of Arduino which will provide reading of voltage
on serial monitor. Supply to GPS will be provided from
Arduino board.
Fig. 3 Soil testing (Top soil)
III. EXPERIMENTATION
Motors connected with driver IC will turn on as you connect
9V dc battery with driver IC connection. Motors will remain in
on mode for 3 seconds, as in programming it is done for 3
seconds. So robot will move ahead for 3 seconds. After 3
seconds robot will stop and servo motor attached in front will
turn on and rotate 90 degree. Rod attached with servo motor
will insert the electrodes attached with it inside the soil. This
electrodes will stay inside till readings are taken and again with
that servo motor electrodes will be removed. Along with that
GPS location of that particular place where reading is taken is
also displayed on serial monitor. After that robot will again
move forward and continue the same task. These voltage
readings taken by robot will be analyzed and converted into
apparent resistivity form by ohms law and apparent resistivity
formula. Based on that readings resistivity of soil can be known
(3).
Fig. 4 Soil testing (Sand)
Fig. 5 Robot representation
Fig.2 Soil testing (Dug soil)
Fig. 6 Setup
348
IJRITCC | March 2016, Available @ http://www.ijritcc.org
______________________________________________________________________________________
International Journal on Recent and Innovation Trends in Computing and Communication
Volume: 4 Issue: 3
ISSN: 2321-8169
347 - 349
_______________________________________________________________________________________
that of top soil. For sand resistivity was highest of among all
soils. Soil was made wet at some depth and above layer of soil
was kept dry. When measured by Wenner method, it showed
resistance drop in all soils.As water is good conductor of
electricity, resistance decreases in soil and conductivity
increases inside soil. So we can know from it that water is
their inside soil at the depth electrodes are inserted inside soil.
Voltage readings and GPS locations of place where soil testing
was done was displayed on serial monitor screen.
Fig. 7 Wenner array method
Values of resistance at different locations and in different
types of soil would vary according to weather conditions, type
of soil, and temperature in that area. Height of electrodes
inserted into the soil is 10 percent of distance measured for
getting voltage.
IV. ANALYSIS AND RESULTS
Soil testing done on different types of soil showed different
results. Three soils Top soil, dug soil and sand which was used
showed difference in resistance. All the three soils taken are
tested by Wenner method (6). Using that resistance in apparent
resistivity formula, resistivity of all three different soils was
found.
Fig. 10 Latitude and Longitude of location
V.CONCLUSION
This method is more useful for lateral study of resistance of
soil. Robot which will do all this reading task itself will be
useful for persons getting to do such task of reading voltages
of soil. Manual effort will get reduced and more accurate
readings can be obtained.
This small robot can be made into big machine type robot
which can do soil testing for ground water analysis on its own
and can send data on its own to the operator sitting at some
another part of world with wireless communication
REFERENCES
Fig. 8 Apparent resistivity comparison of dry soils
Fig. 9 Apparent resistivity comparison of wet soils
[1] Ajibade A.C (1979) The Nigerian Precambrian and the
PanAfrican Orogeny. In: The Precambrian Geology of
Nigeria (P.O.
Oluyide et al, eds), pp. 45-53.
[2] Alile, M.O., S.I. Jegede and O.M. Ehigiator, (2008) Underground
water exploration using electrical resistivity method in Edo State,
Nigeria. Asian J. Earth Sci., 1: 38-42.
[3] Dogara, M.D., B.M. Dewu and C.O. Ajayi, (1998) Groundwater
potential of Romi, Kaduna, Nig. J. Physics., 10:85-90.
[4] Barker,R.D., 1989, Depth of investigation of colinear symmetrical
four-electrode arrays: Geophysics, 54, 10311037.
[5] Y.L. Chow, J.J. Yang and K.D. Srivastava, Grounding resistance
of buried electrodes in multi-layer earth predicted by simple voltage
measurements along earth surfacea theoretical discussion, IEEE
Transactions on Power Delivery, vol. 10, no. 2, pp. 707-715, April
1995.
[6] Cassel, H. and A. Klute (1986). Methods of soil analysis: physical
and mineralogical methods, American Society of Agronomy and Soil
Science Society of America, Madison, Wisconsin, USA. pp1188.
[7] Rakesh Kumar, R. D. Singh and K. D. Sharma: Water resources
of India, Current Science, Vol. 89, No. 5, 10 September 2005
Resistivity obtained was more for top soil. Resistivity for dug
soil as it contains moisture, its resistivity was found lesser than
.
349
IJRITCC | March 2016, Available @ http://www.ijritcc.org
______________________________________________________________________________________
Vous aimerez peut-être aussi
- Before The Lights Go Out: A Survey of EMP Preparedness Reveals Significant ShortfallsDocument15 pagesBefore The Lights Go Out: A Survey of EMP Preparedness Reveals Significant Shortfallss12originalPas encore d'évaluation
- Planting Apple TreesDocument2 pagesPlanting Apple TreesAPRIL RHOSE ALBITOPas encore d'évaluation
- Ham International Multi Mode 2 Service ManualDocument10 pagesHam International Multi Mode 2 Service Manualbill1068Pas encore d'évaluation
- Morse Code Sheet Orion - Math.iastateDocument4 pagesMorse Code Sheet Orion - Math.iastatemswalshPas encore d'évaluation
- Ground Water, Wells and Pumps - Lesson 7 Groundwater Investigation PDFDocument13 pagesGround Water, Wells and Pumps - Lesson 7 Groundwater Investigation PDFSirimilla MeharPas encore d'évaluation
- Ground Water or Sub Surface SourcesDocument32 pagesGround Water or Sub Surface SourcesKim JunmyeonPas encore d'évaluation
- Military ATC Facility Frequencies - : Military Middle Airspace Radar (MARS) and Upper Airspace RadarDocument8 pagesMilitary ATC Facility Frequencies - : Military Middle Airspace Radar (MARS) and Upper Airspace Radarmarven5Pas encore d'évaluation
- Disaster CommunicationsDocument22 pagesDisaster Communicationsnecko77Pas encore d'évaluation
- 1643 Vegetable Garden 1Document5 pages1643 Vegetable Garden 1Arun SomanPas encore d'évaluation
- (HEMP) and Its Impact On The US Power GridDocument155 pages(HEMP) and Its Impact On The US Power GridMoreMoseySpeedPas encore d'évaluation
- Amplificatore Audio AMDocument5 pagesAmplificatore Audio AMEchizen KinichiPas encore d'évaluation
- What To Consider When Digging Your Own Well - Water Well Drilling, Water Well, WellnessDocument2 pagesWhat To Consider When Digging Your Own Well - Water Well Drilling, Water Well, WellnessCyril Jean-BaptistePas encore d'évaluation
- GreenHomeGuide FYIenergyauditDocument24 pagesGreenHomeGuide FYIenergyauditVinayak HegdePas encore d'évaluation
- Electromagnetic Pulse - From Chaos To A Manageble SolutionDocument9 pagesElectromagnetic Pulse - From Chaos To A Manageble SolutionRodney LangleyPas encore d'évaluation
- Electromagnetic Pulse: HistoryDocument11 pagesElectromagnetic Pulse: Historykeshabnayak00Pas encore d'évaluation
- Success With Roses: When It Comes To Fragrance, It's Hard To Beat A RoseDocument5 pagesSuccess With Roses: When It Comes To Fragrance, It's Hard To Beat A RoseJakyyPas encore d'évaluation
- Water Well: Owner's HandbookDocument56 pagesWater Well: Owner's HandbookCyril Jean-BaptistePas encore d'évaluation
- Ball-Milling in Liquid Media - Applications To The Preparation of Anodic Materials For Lithium-Ion BatteriesDocument92 pagesBall-Milling in Liquid Media - Applications To The Preparation of Anodic Materials For Lithium-Ion BatteriessegundosoportePas encore d'évaluation
- Inspecting Bellows DamageDocument1 pageInspecting Bellows DamageSeungmin PaekPas encore d'évaluation
- Water Leak Detection SystemsDocument9 pagesWater Leak Detection SystemsAnitha JebarajPas encore d'évaluation
- Technology Helps in Leak DetectionDocument4 pagesTechnology Helps in Leak DetectionYoussef100% (1)
- Defining Initial Conditions in Ground-Water Flow Modeling: Standard Guide ForDocument2 pagesDefining Initial Conditions in Ground-Water Flow Modeling: Standard Guide ForGeotecnia Perú100% (1)
- Hydrogen Embrittlement of An Interstitia PDFDocument6 pagesHydrogen Embrittlement of An Interstitia PDFArdu StuffPas encore d'évaluation
- Sanla PuttyDocument2 pagesSanla Puttykhanusman7788Pas encore d'évaluation
- Understanding Your Soil Test ReportDocument24 pagesUnderstanding Your Soil Test ReportdanielPas encore d'évaluation
- Home Built WindpowerDocument8 pagesHome Built Windpowertaner56Pas encore d'évaluation
- Above-Ground Rainwater StorageDocument4 pagesAbove-Ground Rainwater StorageikaspuspasariPas encore d'évaluation
- Amateur Radio Q CodesDocument2 pagesAmateur Radio Q CodesjqthebestestPas encore d'évaluation
- Torque Requirement For High Solid Centrifugal Sludge DewateringDocument5 pagesTorque Requirement For High Solid Centrifugal Sludge DewateringArdyanto WijayaPas encore d'évaluation
- Radio Morse Code From 3 To 60 MHZDocument16 pagesRadio Morse Code From 3 To 60 MHZparasharaPas encore d'évaluation
- Unit 1 Circuits and Networks: StructureDocument21 pagesUnit 1 Circuits and Networks: StructureMomoko SakuraPas encore d'évaluation
- Astm F2159Document6 pagesAstm F2159Hernando Andrés Ramírez GilPas encore d'évaluation
- 13 Types of Water Purification and Filteration SystemsDocument18 pages13 Types of Water Purification and Filteration SystemsPradeep TaniparthiPas encore d'évaluation
- SmallGhsePresentation PDFDocument36 pagesSmallGhsePresentation PDFArvind PalPas encore d'évaluation
- Multiple Ply BellowsDocument1 pageMultiple Ply BellowsSeungmin PaekPas encore d'évaluation
- Manual Kenwood TM 710Document55 pagesManual Kenwood TM 710Lemos FerreiraPas encore d'évaluation
- Tables of Flange PDFDocument5 pagesTables of Flange PDFAngel AngeleyePas encore d'évaluation
- Best Practice Recommendations For Manufacturing Ceramic Pot Filters June2011Document187 pagesBest Practice Recommendations For Manufacturing Ceramic Pot Filters June2011Raihan Fiqri IrwandaPas encore d'évaluation
- Water Cistern ConstructionDocument8 pagesWater Cistern ConstructionMoBiquePas encore d'évaluation
- 4w FM TransmitterDocument9 pages4w FM TransmitterMantas PauliukonisPas encore d'évaluation
- Spring Design: Prepared and Presented By: Manoj AdhikariDocument21 pagesSpring Design: Prepared and Presented By: Manoj AdhikariDhiraj NayakPas encore d'évaluation
- Septic Tanks: On-Site Wastewater Treatment: Let's Examine Some Basic Concepts About The Septic Tank in Your BackyardDocument6 pagesSeptic Tanks: On-Site Wastewater Treatment: Let's Examine Some Basic Concepts About The Septic Tank in Your BackyardSurya Vansh BasnettPas encore d'évaluation
- A Beginner's Guide To Making CW Contacts: by Jack Wagoner WB8FSVDocument19 pagesA Beginner's Guide To Making CW Contacts: by Jack Wagoner WB8FSVnmiPas encore d'évaluation
- Electrode Less LampDocument21 pagesElectrode Less LampjraviecePas encore d'évaluation
- Training HNDBK 12-3-15Document57 pagesTraining HNDBK 12-3-15Robert HargenraterPas encore d'évaluation
- Photo 1: Hours of Fun!Document10 pagesPhoto 1: Hours of Fun!Alana PetersonPas encore d'évaluation
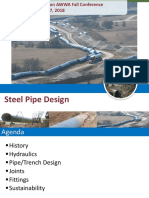
- FL AWWA Steel Pipelines - 0Document42 pagesFL AWWA Steel Pipelines - 0Francis DhanarajPas encore d'évaluation
- Spirit Levels - Block LevelsDocument4 pagesSpirit Levels - Block LevelsGia Minh Tieu Tu100% (1)
- Measurements With The NanoVNA Part 2 Measurement of High ImpedancesDocument8 pagesMeasurements With The NanoVNA Part 2 Measurement of High ImpedancesNataniel KeglesPas encore d'évaluation
- How To Make AspirinDocument7 pagesHow To Make Aspirinafzal4u100% (8)
- Nuclear Weapons Effects National EnterpriseDocument92 pagesNuclear Weapons Effects National EnterpriseGene Sevin100% (1)
- Finding The Difficult' Leaks: Mfarley@alvescot - Demon.co - UkDocument4 pagesFinding The Difficult' Leaks: Mfarley@alvescot - Demon.co - UkYoussefPas encore d'évaluation
- My Resume Katherine BoggsDocument1 pageMy Resume Katherine Boggsapi-247047426100% (1)
- 7300 QH Stationary Gothic High-Tunnel Bender Instruction ManualDocument43 pages7300 QH Stationary Gothic High-Tunnel Bender Instruction ManualZlatko JusupovicPas encore d'évaluation
- Catalog ASTROL PVC Pipe FittingsDocument40 pagesCatalog ASTROL PVC Pipe FittingsArindam Chanda0% (1)
- Digital Logic Design Lab - 6,10,12Document12 pagesDigital Logic Design Lab - 6,10,12Eman IjazPas encore d'évaluation
- Krishnan 2021 IOP Conf. Ser. Mater. Sci. Eng. 1055 012002Document7 pagesKrishnan 2021 IOP Conf. Ser. Mater. Sci. Eng. 1055 012002Rosario Huaranca QuispePas encore d'évaluation
- Underground Water Prospecting in Rural Settings: E. C. Mabunda, Beng, MSCDocument10 pagesUnderground Water Prospecting in Rural Settings: E. C. Mabunda, Beng, MSCInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Automatic Plant Watering SystemDocument8 pagesAutomatic Plant Watering SystemIJRASETPublicationsPas encore d'évaluation
- Sbias Mini Project ReportDocument19 pagesSbias Mini Project ReportBarath BiberPas encore d'évaluation
- Importance of Similarity Measures in Effective Web Information RetrievalDocument5 pagesImportance of Similarity Measures in Effective Web Information RetrievalEditor IJRITCCPas encore d'évaluation
- A Review of 2D &3D Image Steganography TechniquesDocument5 pagesA Review of 2D &3D Image Steganography TechniquesEditor IJRITCCPas encore d'évaluation
- Channel Estimation Techniques Over MIMO-OFDM SystemDocument4 pagesChannel Estimation Techniques Over MIMO-OFDM SystemEditor IJRITCCPas encore d'évaluation
- A Study of Focused Web Crawling TechniquesDocument4 pagesA Study of Focused Web Crawling TechniquesEditor IJRITCCPas encore d'évaluation
- Diagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmDocument5 pagesDiagnosis and Prognosis of Breast Cancer Using Multi Classification AlgorithmEditor IJRITCCPas encore d'évaluation
- Predictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth KotianDocument3 pagesPredictive Analysis For Diabetes Using Tableau: Dhanamma Jagli Siddhanth Kotianrahul sharmaPas encore d'évaluation
- Prediction of Crop Yield Using LS-SVMDocument3 pagesPrediction of Crop Yield Using LS-SVMEditor IJRITCCPas encore d'évaluation
- Hybrid Algorithm For Enhanced Watermark Security With Robust DetectionDocument5 pagesHybrid Algorithm For Enhanced Watermark Security With Robust Detectionrahul sharmaPas encore d'évaluation
- Itimer: Count On Your TimeDocument4 pagesItimer: Count On Your Timerahul sharmaPas encore d'évaluation
- 45 1530697786 - 04-07-2018 PDFDocument5 pages45 1530697786 - 04-07-2018 PDFrahul sharmaPas encore d'évaluation
- 44 1530697679 - 04-07-2018 PDFDocument3 pages44 1530697679 - 04-07-2018 PDFrahul sharmaPas encore d'évaluation
- Safeguarding Data Privacy by Placing Multi-Level Access RestrictionsDocument3 pagesSafeguarding Data Privacy by Placing Multi-Level Access Restrictionsrahul sharmaPas encore d'évaluation
- Paper On Design and Analysis of Wheel Set Assembly & Disassembly Hydraulic Press MachineDocument4 pagesPaper On Design and Analysis of Wheel Set Assembly & Disassembly Hydraulic Press MachineEditor IJRITCCPas encore d'évaluation
- 49 1530872658 - 06-07-2018 PDFDocument6 pages49 1530872658 - 06-07-2018 PDFrahul sharmaPas encore d'évaluation
- 41 1530347319 - 30-06-2018 PDFDocument9 pages41 1530347319 - 30-06-2018 PDFrahul sharmaPas encore d'évaluation
- Utilization and Conservation of Water Resources in BangladeshDocument13 pagesUtilization and Conservation of Water Resources in BangladeshAbir MohammadPas encore d'évaluation
- EIA of SWMDocument261 pagesEIA of SWMAnonymous uBNRwzr7DZPas encore d'évaluation
- Chapter 6 PDFDocument12 pagesChapter 6 PDFPushpalata ChavanPas encore d'évaluation
- The Economist (Thu, 25 Oct 2018) - CalibreDocument222 pagesThe Economist (Thu, 25 Oct 2018) - CalibreOscar JimenezPas encore d'évaluation
- Impact of Urbanisation On Groundwater in Karapakkam Village: R. SubalakshmiDocument79 pagesImpact of Urbanisation On Groundwater in Karapakkam Village: R. SubalakshmijkirsjPas encore d'évaluation
- Wastewater Engineering:: Instructor DR Sher Jamal KhanDocument53 pagesWastewater Engineering:: Instructor DR Sher Jamal KhanZahid FarooqPas encore d'évaluation
- Knowledge, Awareness and Role of Women On Watershed Resource Conservation Andprotection in One Municipality in The Province of AlbayDocument8 pagesKnowledge, Awareness and Role of Women On Watershed Resource Conservation Andprotection in One Municipality in The Province of AlbayIJAR JOURNALPas encore d'évaluation
- NAHRIM's Experiencein Rainwater Utilisation System Research-SlidesDocument13 pagesNAHRIM's Experiencein Rainwater Utilisation System Research-SlideskaishiPas encore d'évaluation
- Sez in Uttar Pradesh A Case Study of NoidaDocument42 pagesSez in Uttar Pradesh A Case Study of Noidaanusha8204Pas encore d'évaluation
- EEE R16 SyllabusDocument160 pagesEEE R16 SyllabusSureshPas encore d'évaluation
- WetlandDocument45 pagesWetlandnawin1234Pas encore d'évaluation
- IWA Complete ListDocument56 pagesIWA Complete ListviettiennguyenPas encore d'évaluation
- Water Resources DipitDocument32 pagesWater Resources Dipitvineet_knwr100% (1)
- Hydraulic Conductivity PDFDocument446 pagesHydraulic Conductivity PDFJhon Tarrillo100% (1)
- EGU2012-10741 ZeyligerDocument1 pageEGU2012-10741 ZeyligermedesdesirePas encore d'évaluation
- Environmental Problems of AravaliDocument236 pagesEnvironmental Problems of Aravalipj10_rulesPas encore d'évaluation
- B - Arch 2nd Sem Finalized 26-12Document24 pagesB - Arch 2nd Sem Finalized 26-12Devvrat RajgopalPas encore d'évaluation
- East SinghbhumDocument32 pagesEast Singhbhumbandana2nandi100% (1)
- Women in Water UtilitiesDocument92 pagesWomen in Water UtilitiessofiabloemPas encore d'évaluation
- Valuing Ground Water - Economic Concepts and ApproachesDocument202 pagesValuing Ground Water - Economic Concepts and ApproachesLaura LeppezPas encore d'évaluation
- Teachers Manual Diploma Hydropower EngineeringDocument270 pagesTeachers Manual Diploma Hydropower Engineeringvessel100% (3)
- Environmental Impact of Geothermal Energy SynthesisDocument10 pagesEnvironmental Impact of Geothermal Energy SynthesisKyle Vince Miñano AnchetaPas encore d'évaluation
- Hyegine Business PlanDocument41 pagesHyegine Business PlanrendaninPas encore d'évaluation
- IMP Desalination Brochure enDocument7 pagesIMP Desalination Brochure enrohitPas encore d'évaluation
- 2009 Landell Mills V1 Main - WRDIP PPTA Final Report 42091-01-Afg-Tacr PDFDocument104 pages2009 Landell Mills V1 Main - WRDIP PPTA Final Report 42091-01-Afg-Tacr PDFweinhc2Pas encore d'évaluation
- How To Avoid Wastage of EnergyDocument1 pageHow To Avoid Wastage of EnergyNazrawi IJobsPas encore d'évaluation
- Sustainable Water ManagementDocument56 pagesSustainable Water ManagementFadhiel MuhammadPas encore d'évaluation
- HDocument1 002 pagesHAnonymous 3klrkDPas encore d'évaluation
- Groundwater Study in The PhilippinesDocument18 pagesGroundwater Study in The PhilippinesJaysonPas encore d'évaluation
- Comore Loma Water Corp DW Improvement Project Eid 0614Document193 pagesComore Loma Water Corp DW Improvement Project Eid 0614Mark ReinhardtPas encore d'évaluation