Vous aimerez peut-être aussi
- VxWorks - Get StartedDocument13 pagesVxWorks - Get StartedRps Deepan100% (1)
- RTOS SpecificationDocument15 pagesRTOS SpecificationKvks SatishPas encore d'évaluation
- An Overview Tutorial of The Vxworks Real-Time Operating System byDocument9 pagesAn Overview Tutorial of The Vxworks Real-Time Operating System byRangaRajPas encore d'évaluation
- VX WorksDocument42 pagesVX Worksrakeshkalathil100% (1)
- Vxworks Vs RTLinuxDocument5 pagesVxworks Vs RTLinuxNithin RamakrishnaPas encore d'évaluation
- Vxworks Architecture Supplement 6.2Document252 pagesVxworks Architecture Supplement 6.2dmctekPas encore d'évaluation
- Architecture of (Vxworks) : Labview ProgramsDocument14 pagesArchitecture of (Vxworks) : Labview ProgramsRangaRaj100% (1)
- Lcu14 500armtrustedfirmware 140919105449 Phpapp02 PDFDocument10 pagesLcu14 500armtrustedfirmware 140919105449 Phpapp02 PDFDuy Phuoc NguyenPas encore d'évaluation
- Yocto TutorialDocument16 pagesYocto Tutorialhex0x1Pas encore d'évaluation
- Vxworks Application Programmers Guide 6.7Document432 pagesVxworks Application Programmers Guide 6.7Charles J. BranscombePas encore d'évaluation
- Embedded Operating SystemsDocument34 pagesEmbedded Operating SystemssanssecoursPas encore d'évaluation
- Real-Time Operating Systems An Ongoing ReviewDocument4 pagesReal-Time Operating Systems An Ongoing Reviewsharath_rakkiPas encore d'évaluation
- Remote Procedure Call IntroDocument4 pagesRemote Procedure Call IntrooparikokoPas encore d'évaluation
- Embedded Linux Course Slides PDFDocument571 pagesEmbedded Linux Course Slides PDFranbumailsPas encore d'évaluation
- Manual JuniperDocument242 pagesManual JuniperAndres GarciaPas encore d'évaluation
- Linux Booting Procedure: Sirak KaewjamnongDocument39 pagesLinux Booting Procedure: Sirak KaewjamnongThamarai SelvanPas encore d'évaluation
- Cross Compiler & Assembler & LinkerDocument37 pagesCross Compiler & Assembler & Linkervarun2313676Pas encore d'évaluation
- Comparison Between CPU Scheduling in VxWorks and RTLinuxDocument9 pagesComparison Between CPU Scheduling in VxWorks and RTLinuxx2y2z2rmPas encore d'évaluation
- Introduction To Device Trees PDFDocument34 pagesIntroduction To Device Trees PDFm3y54mPas encore d'évaluation
- Survey of RtosDocument17 pagesSurvey of Rtoskvamsee112100% (1)
- RTOS & VxWorks FundamentalsDocument15 pagesRTOS & VxWorks Fundamentalsshailesh_verma35Pas encore d'évaluation
- Vxworks: Reference ManualDocument1 670 pagesVxworks: Reference Manualshiva1luPas encore d'évaluation
- Rtems Installation ProcedureDocument6 pagesRtems Installation ProcedureConstantine Giotopoulos100% (1)
- Rootfs Kernel DeveloperDocument18 pagesRootfs Kernel Developerunknown userPas encore d'évaluation
- Protect Critical Iot Devices With Vxworks Secure Boot and Secure LoadingDocument7 pagesProtect Critical Iot Devices With Vxworks Secure Boot and Secure LoadingDouglas Galetti RibeiroPas encore d'évaluation
- HDL Based DesignDocument7 pagesHDL Based DesignSriramamurthy GurugubelliPas encore d'évaluation
- Multimedia in Embedded Linux GuideDocument75 pagesMultimedia in Embedded Linux Guidedenkins2020Pas encore d'évaluation
- Vxworks Rtos: Embedded Systems-AssignmentDocument6 pagesVxworks Rtos: Embedded Systems-AssignmentPrashanth KumarPas encore d'évaluation
- Device Trree Explained For LinuxDocument7 pagesDevice Trree Explained For LinuxapaponderPas encore d'évaluation
- Sitara Linux Training - Hands On With QTDocument43 pagesSitara Linux Training - Hands On With QTKyle HolderPas encore d'évaluation
- Study of DVMRP, MOSPF, CBT, PIM, MBONE, EIGRP, CIDRDocument6 pagesStudy of DVMRP, MOSPF, CBT, PIM, MBONE, EIGRP, CIDRnishiPas encore d'évaluation
- X-Windows Lab ManualDocument109 pagesX-Windows Lab ManualDeepika Singh100% (1)
- Fasttrack, Fastpath, Isp Network DesignDocument68 pagesFasttrack, Fastpath, Isp Network DesignIwan YuliantoPas encore d'évaluation
- Linux ToolchainDocument34 pagesLinux ToolchainDhruv ChawdaPas encore d'évaluation
- Contemporary Device Tree PDFDocument25 pagesContemporary Device Tree PDFgiribabu reddyPas encore d'évaluation
- Zedboard UbuntuDocument11 pagesZedboard Ubuntuebuddy1705Pas encore d'évaluation
- Mehmet Akif Güneş 504102502Document20 pagesMehmet Akif Güneş 504102502Mehmet Akif GunesPas encore d'évaluation
- Pci Sig SR Iov PrimerDocument28 pagesPci Sig SR Iov Primerteo2005Pas encore d'évaluation
- RTOS VxWorksDocument8 pagesRTOS VxWorksAshraful HimelPas encore d'évaluation
- C Program To Implement A Stack: Problem DescriptionDocument9 pagesC Program To Implement A Stack: Problem DescriptionRAMUPas encore d'évaluation
- OpenEmbedded Bitbake ManualDocument147 pagesOpenEmbedded Bitbake ManualDianaPas encore d'évaluation
- VxWorks Programmers Guide5.5Document539 pagesVxWorks Programmers Guide5.5regyamata100% (1)
- Introduction: Operating System SupportDocument63 pagesIntroduction: Operating System SupportErmercado78Pas encore d'évaluation
- RT LinuxDocument11 pagesRT LinuxKevinXavierPas encore d'évaluation
- QNX NeutrinoDocument2 pagesQNX NeutrinoAbdul WadoodPas encore d'évaluation
- Embedded Systems: Theory and DesignDocument27 pagesEmbedded Systems: Theory and Designaashishkumarneelkant0% (1)
- Open OcdDocument137 pagesOpen OcdBusayo OjumuPas encore d'évaluation
- Embedded Software Primer - Ch8Document30 pagesEmbedded Software Primer - Ch8komal purohit50% (2)
- 6LoWPAN TutorialDocument45 pages6LoWPAN TutorialEdita LatifiPas encore d'évaluation
- Vxworks Real Time OsDocument6 pagesVxworks Real Time OsKomal AwasthiPas encore d'évaluation
- BSD Kernel DebuggingDocument12 pagesBSD Kernel DebuggingAlexis XavierPas encore d'évaluation
- VX Worksproject 10Document32 pagesVX Worksproject 10Abhay Kumar Sahu100% (1)
- Vxworks - Final PDFDocument125 pagesVxworks - Final PDFBhanu Prakash K100% (1)
- Introduction To FreeRTOSDocument75 pagesIntroduction To FreeRTOSឆាម វ៉ាន់នូវPas encore d'évaluation
- Embedded Systems - Fs 2018: Figure 1: Simplified Task States Diagram in FreertosDocument8 pagesEmbedded Systems - Fs 2018: Figure 1: Simplified Task States Diagram in FreertosPhạm Đức HuyPas encore d'évaluation
- Java Concurrent ApiDocument18 pagesJava Concurrent Apiawstestacc34Pas encore d'évaluation
- Parallel Regions: ComputeDocument8 pagesParallel Regions: Computepuskesmas sukaweningPas encore d'évaluation
- Embedded Programming: FreertosDocument18 pagesEmbedded Programming: FreertosCristian CeruţaPas encore d'évaluation
- Indian Institute of Space Science and Technology AV 341: Computer Networks LabDocument19 pagesIndian Institute of Space Science and Technology AV 341: Computer Networks LabshikhamaharanaPas encore d'évaluation
- Task CreationDocument5 pagesTask Creationmadhansurya.2102110Pas encore d'évaluation
- Affidavit Student PTPDocument1 pageAffidavit Student PTPShubham GuptaPas encore d'évaluation
- TEXAS Instruments Placement Sample Paper 5Document43 pagesTEXAS Instruments Placement Sample Paper 5aditya7398Pas encore d'évaluation
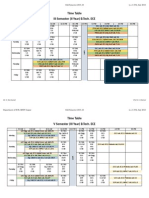
- Class TT Odd Sem 2015 16 PDFDocument7 pagesClass TT Odd Sem 2015 16 PDFShubham GuptaPas encore d'évaluation
- Affidavit Student PTPDocument1 pageAffidavit Student PTPShubham GuptaPas encore d'évaluation
- Placement Rules and RegulationsDocument3 pagesPlacement Rules and RegulationsShubham GuptaPas encore d'évaluation
- ReferencesDocument1 pageReferencesShubham GuptaPas encore d'évaluation
- What Is Channel EstimationDocument15 pagesWhat Is Channel EstimationShubham GuptaPas encore d'évaluation
- Statement of PurposeDocument1 pageStatement of PurposeShubham GuptaPas encore d'évaluation
- Cache Example 1Document16 pagesCache Example 1Ayush GeraPas encore d'évaluation
- E-Yantra Robotics Competition - 2014: Implementation Analysis - Warehouse Managing RobotDocument4 pagesE-Yantra Robotics Competition - 2014: Implementation Analysis - Warehouse Managing RobotShubham GuptaPas encore d'évaluation
- Lorient (19 June) To Paris MontaprasseDocument3 pagesLorient (19 June) To Paris MontaprasseShubham GuptaPas encore d'évaluation
- Ofdm PDFDocument1 pageOfdm PDFShubham GuptaPas encore d'évaluation
- D.S SynchronisationDocument31 pagesD.S SynchronisationMarvin NjengaPas encore d'évaluation
- CMOS Layout: Mask LayersDocument5 pagesCMOS Layout: Mask LayerschittajitsarkarsterPas encore d'évaluation
- Task 1 Warehouse Managing RobotDocument5 pagesTask 1 Warehouse Managing RobotShubham GuptaPas encore d'évaluation
- CMOS Layout: Mask LayersDocument5 pagesCMOS Layout: Mask LayerschittajitsarkarsterPas encore d'évaluation
- E-Yantra Robotics Competition - 2014: Implementation Analysis - Warehouse Managing RobotDocument4 pagesE-Yantra Robotics Competition - 2014: Implementation Analysis - Warehouse Managing RobotShubham GuptaPas encore d'évaluation
- E-Yantra Robotics Competition - 2014: Implementation Analysis - Warehouse Managing RobotDocument4 pagesE-Yantra Robotics Competition - 2014: Implementation Analysis - Warehouse Managing RobotShubham GuptaPas encore d'évaluation
- PH0101 Unit 2 Lecture 4: Wave Guide Basic Features Rectangular Wave Guide Circular Wave Guide ApplicationsDocument32 pagesPH0101 Unit 2 Lecture 4: Wave Guide Basic Features Rectangular Wave Guide Circular Wave Guide ApplicationsShubham Gupta100% (1)
- CMOS Layout: Mask LayersDocument5 pagesCMOS Layout: Mask LayerschittajitsarkarsterPas encore d'évaluation
- Coding Standard eYRC/eYRC-Plus 2014: 1. File Level CommentsDocument3 pagesCoding Standard eYRC/eYRC-Plus 2014: 1. File Level CommentsShubham GuptaPas encore d'évaluation
- Experiment-9: ObjectiveDocument18 pagesExperiment-9: ObjectiveShubham GuptaPas encore d'évaluation
- 13-1007311919 Asif Chowdhury Bank SlipDocument1 page13-1007311919 Asif Chowdhury Bank SlipArthur SandersPas encore d'évaluation
- Solution of Network Analysis M e Van Valkenburg CH 1 2 3 4Document163 pagesSolution of Network Analysis M e Van Valkenburg CH 1 2 3 4Shashank BhagwatPas encore d'évaluation
- Cognitive RadioDocument1 pageCognitive RadioShubham GuptaPas encore d'évaluation
- 06 Fault SimulationDocument16 pages06 Fault SimulationShubham GuptaPas encore d'évaluation
- Cap4 Mihaela All EnglishDocument30 pagesCap4 Mihaela All EnglishShubham GuptaPas encore d'évaluation
- Geovision GV-NVR User GuideDocument14 pagesGeovision GV-NVR User GuideFrancisco JavierPas encore d'évaluation
- Sipeed Lichee Zero Plus Datasheet V1.0 PDFDocument6 pagesSipeed Lichee Zero Plus Datasheet V1.0 PDFtgininPas encore d'évaluation
- Grade 9: Compute R Networks .Document26 pagesGrade 9: Compute R Networks .Elizabeth VinithaPas encore d'évaluation
- The Switch Hierarchical Network Design M PDFDocument5 pagesThe Switch Hierarchical Network Design M PDFFajar DeswantaraPas encore d'évaluation
- Video Server Request Router TV Director Datasheet EdgewareDocument2 pagesVideo Server Request Router TV Director Datasheet EdgewareRaul Cespedes IchazoPas encore d'évaluation
- CS625 Errata and Clarification Sheet V13Document11 pagesCS625 Errata and Clarification Sheet V13Safraz BacchusPas encore d'évaluation
- NetApp AFF A-Series DatasheetDocument6 pagesNetApp AFF A-Series DatasheetGary BinnsPas encore d'évaluation
- Tech Workbook Vol1Document120 pagesTech Workbook Vol1paulo_an7381100% (2)
- Konfigurasi Switch LinksysDocument46 pagesKonfigurasi Switch LinksysDe PartaPas encore d'évaluation
- 8.1.4.7 Packet Tracer - Subnetting Scenario 1Document4 pages8.1.4.7 Packet Tracer - Subnetting Scenario 1Duscosi100% (1)
- Guide To Coherence Training With The BrainmasterDocument1 pageGuide To Coherence Training With The BrainmasterDomingo Torres SPas encore d'évaluation
- VMAX File Flag SettingsDocument3 pagesVMAX File Flag SettingsShashi KanthPas encore d'évaluation
- STEP 7 Professional 2021 ReadMeDocument18 pagesSTEP 7 Professional 2021 ReadMeAndrea GarciaPas encore d'évaluation
- Ds D2841-ADocument2 pagesDs D2841-ACris PopPas encore d'évaluation
- Jade Programming TutorialDocument20 pagesJade Programming TutorialChu Văn NamPas encore d'évaluation
- Firewall Interview Questions AsaDocument3 pagesFirewall Interview Questions AsaRakesh Rakee0% (1)
- Nexus Configuration For ACSDocument6 pagesNexus Configuration For ACSVirender Kumar100% (1)
- Spectra LTE-U OD FDD u4G-UE1000 UE: Basic SpecificationsDocument2 pagesSpectra LTE-U OD FDD u4G-UE1000 UE: Basic SpecificationsMiguel San Román RosellPas encore d'évaluation
- DEN0022D - Power - State - Coordination - Interface - Candidate B - DeltaDocument110 pagesDEN0022D - Power - State - Coordination - Interface - Candidate B - DeltavnitstudentPas encore d'évaluation
- ACI White Paper DesignDocument155 pagesACI White Paper DesignFatah AssadPas encore d'évaluation
- 01 Beagle BoneDocument16 pages01 Beagle BoneSamraj ECEPas encore d'évaluation
- The - RADIUS Client Is NAP-Capable - Check BoxDocument2 pagesThe - RADIUS Client Is NAP-Capable - Check BoxMaxime MorelonPas encore d'évaluation
- CS193X: Web Programming Fundamentals: Spring 2017 Victoria Kirst (Vrk@stanford - Edu)Document96 pagesCS193X: Web Programming Fundamentals: Spring 2017 Victoria Kirst (Vrk@stanford - Edu)KabaliPas encore d'évaluation
- 梁存铭Intel - Core - effeciency PDFDocument21 pages梁存铭Intel - Core - effeciency PDFanilkoliPas encore d'évaluation
- The Catalyst 9500 SeriesDocument51 pagesThe Catalyst 9500 SerieswuryaningsihPas encore d'évaluation
- Updating Storwize V7000 Drive CodeDocument6 pagesUpdating Storwize V7000 Drive CodeJOFdePPas encore d'évaluation
- Multiple ChoiceDocument14 pagesMultiple ChoiceMohammad HamoudePas encore d'évaluation
- Dedicated Server Software Documentation: Release 6.0.8.1 November 18th, 2015Document9 pagesDedicated Server Software Documentation: Release 6.0.8.1 November 18th, 2015Jeff barkerPas encore d'évaluation
- DE10-Standard User ManualDocument134 pagesDE10-Standard User ManualAniita CabezasPas encore d'évaluation
- Coal Assignment 3 19F-0285 Imran Shaheer Question # 1:: Irvine32.incDocument6 pagesCoal Assignment 3 19F-0285 Imran Shaheer Question # 1:: Irvine32.incImran ShaheerPas encore d'évaluation