Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Assignment 1 TOMDocument1 pageAssignment 1 TOMKishor JadhavPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- FEM Assignment1Document2 pagesFEM Assignment1Kishor JadhavPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- ReadmexxxDocument1 pageReadmexxxMustafa AkbarPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- RealtekDocument10 pagesRealteknico0jPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- MaklubeDocument1 pageMaklubeAmr IbniRamizPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Display Format:: CourseDocument2 pagesDisplay Format:: CourseKishor JadhavPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Creating PDFDocument6 pagesCreating PDFKishor JadhavPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- AaaaaaaaaaaaaaaDocument1 pageAaaaaaaaaaaaaaaKishor JadhavPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- IITB Timetable For Design Engineering - 3 Years CourseDocument2 pagesIITB Timetable For Design Engineering - 3 Years CourseKishor JadhavPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 8D & 7QC ToolsDocument117 pages8D & 7QC ToolsAshok Kumar100% (1)
- DILG Opinion-Sanggunian Employees Disbursements, Sign Checks & Travel OrderDocument2 pagesDILG Opinion-Sanggunian Employees Disbursements, Sign Checks & Travel OrderCrizalde de DiosPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Nuttall Gear CatalogDocument275 pagesNuttall Gear Catalogjose huertasPas encore d'évaluation
- LP MAPEH 10 1st Quarter Printing Final.Document29 pagesLP MAPEH 10 1st Quarter Printing Final.tatineeesamontePas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Serenity RPG Firefly Role Playing Game PDFDocument225 pagesSerenity RPG Firefly Role Playing Game PDFNathaniel Broyles67% (3)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- ProjectDocument22 pagesProjectSayan MondalPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- New Text DocumentDocument13 pagesNew Text DocumentJitendra Karn RajputPas encore d'évaluation
- Frequently Asked Questions: Lecture 7 To 9 Hydraulic PumpsDocument5 pagesFrequently Asked Questions: Lecture 7 To 9 Hydraulic PumpsJatadhara GSPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- NATO Obsolescence Management PDFDocument5 pagesNATO Obsolescence Management PDFluisPas encore d'évaluation
- Project On Mahindra BoleroDocument35 pagesProject On Mahindra BoleroViPul75% (8)
- Paper 4 Material Management Question BankDocument3 pagesPaper 4 Material Management Question BankDr. Rakshit Solanki100% (2)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Teambinder Product BrochureDocument7 pagesTeambinder Product BrochurePrincePas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
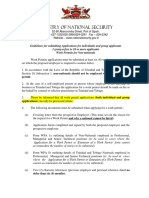
- Work Permits New Guideline Amendments 2021 23.11.2021Document7 pagesWork Permits New Guideline Amendments 2021 23.11.2021Sabrina BrathwaitePas encore d'évaluation
- Measures For FloodsDocument4 pagesMeasures For FloodsMutsitsikoPas encore d'évaluation
- Distance SortDocument6 pagesDistance SortAI Coordinator - CSC JournalsPas encore d'évaluation
- Distillation ColumnDocument22 pagesDistillation Columndiyar chePas encore d'évaluation
- Edtpa Lesson 3Document3 pagesEdtpa Lesson 3api-299319227Pas encore d'évaluation
- Rolling TechnologyDocument4 pagesRolling TechnologyFrancis Erwin Bernard100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- List of Bird Sanctuaries in India (State-Wise)Document6 pagesList of Bird Sanctuaries in India (State-Wise)VISHRUTH.S. GOWDAPas encore d'évaluation
- Assignment 1 Brief: ScenarioDocument4 pagesAssignment 1 Brief: ScenarioChâu TrầnPas encore d'évaluation
- Earth and Life Science, Grade 11Document6 pagesEarth and Life Science, Grade 11Gregorio RizaldyPas encore d'évaluation
- The Chassis OC 500 LE: Technical InformationDocument12 pagesThe Chassis OC 500 LE: Technical InformationAbdelhak Ezzahrioui100% (1)
- Studies - Number and Algebra P1Document45 pagesStudies - Number and Algebra P1nathan.kimPas encore d'évaluation
- Master Data FileDocument58 pagesMaster Data Fileinfo.glcom5161Pas encore d'évaluation
- AWS Compete CustomerDocument33 pagesAWS Compete CustomerSergeyPas encore d'évaluation
- Java Edition Data Values - Official Minecraft WikiDocument140 pagesJava Edition Data Values - Official Minecraft WikiCristian Rene SuárezPas encore d'évaluation
- Assignment & Case Marketing Week 1: Max Van Neerven: 1664172 Mounir Trabelsi: 1705839 Renaldas Zlatkus: 1701775Document8 pagesAssignment & Case Marketing Week 1: Max Van Neerven: 1664172 Mounir Trabelsi: 1705839 Renaldas Zlatkus: 1701775Ren ZkPas encore d'évaluation
- Hydrogen Production by Steam ReformingDocument10 pagesHydrogen Production by Steam ReformingramiarenasPas encore d'évaluation
- RseDocument60 pagesRseH S Vishwanath ShastryPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- R, Axn: Housingand RegulatoryDocument5 pagesR, Axn: Housingand RegulatoryAce RamosoPas encore d'évaluation