Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Simplified Design Method For Litz WireDocument8 pagesSimplified Design Method For Litz WiresercanPas encore d'évaluation
- Building a reliable capacitive sensor interface with AD7142 capacitive-to-digital converterDocument2 pagesBuilding a reliable capacitive sensor interface with AD7142 capacitive-to-digital converterShri KulkarniPas encore d'évaluation
- Vacuumschmelze EMC Nanocrystalline VITROPERMDocument28 pagesVacuumschmelze EMC Nanocrystalline VITROPERMShri KulkarniPas encore d'évaluation
- Elektrisola Litz WireDocument1 pageElektrisola Litz WireShri KulkarniPas encore d'évaluation
- 8-Point Moving Average FilterDocument6 pages8-Point Moving Average FilterAnonymous GxeR0LPas encore d'évaluation
- 11 KW Bi-Directional CLLC DC-DC Converter InfineonDocument55 pages11 KW Bi-Directional CLLC DC-DC Converter InfineonShri KulkarniPas encore d'évaluation
- High Efficiency 30 kW Boost Composite Converter DesignDocument8 pagesHigh Efficiency 30 kW Boost Composite Converter DesignShri KulkarniPas encore d'évaluation
- Sliding-Mode Control of A DC-DC Postfilter For Ripple Reduction and Efficiency Improvement in POL ApplicationsDocument11 pagesSliding-Mode Control of A DC-DC Postfilter For Ripple Reduction and Efficiency Improvement in POL ApplicationsShri KulkarniPas encore d'évaluation
- Design of A 5-kW, 1-U, 10-kW/dm3 Resonant DC-DC Converter For Telecom ApplicationsDocument11 pagesDesign of A 5-kW, 1-U, 10-kW/dm3 Resonant DC-DC Converter For Telecom ApplicationsAra AkramPas encore d'évaluation
- A Novel ZVS DC-DC Converter For High Power Applications-Zhang2004Document10 pagesA Novel ZVS DC-DC Converter For High Power Applications-Zhang2004Shri KulkarniPas encore d'évaluation
- Litz Design PDFsDocument2 pagesLitz Design PDFsShri KulkarniPas encore d'évaluation
- Electromagnetic Problems Solving by Conformal Mapping - A Mathematical Operator For Optimization - GoodDocument20 pagesElectromagnetic Problems Solving by Conformal Mapping - A Mathematical Operator For Optimization - GoodShri KulkarniPas encore d'évaluation
- Litzwire Com Litz Design HTMDocument1 pageLitzwire Com Litz Design HTMShri KulkarniPas encore d'évaluation
- Analysis, Design and Control of DC-DC Resonant Converter - ThesisDocument233 pagesAnalysis, Design and Control of DC-DC Resonant Converter - ThesisShri KulkarniPas encore d'évaluation
- 10 KW iDC DC ConverterDocument4 pages10 KW iDC DC ConverterShri KulkarniPas encore d'évaluation
- Measuring Accurately Small - Capacitive (And Other) - Sensor Signals Via Long Wires With Microcontroller - Apputi06Document8 pagesMeasuring Accurately Small - Capacitive (And Other) - Sensor Signals Via Long Wires With Microcontroller - Apputi06Shri KulkarniPas encore d'évaluation
- PIC16F152XX Family Programming SpecificationDocument39 pagesPIC16F152XX Family Programming SpecificationShri KulkarniPas encore d'évaluation
- A Design Methodology For Low-Cost, High-Performance Capacitive SensorsDocument152 pagesA Design Methodology For Low-Cost, High-Performance Capacitive SensorsShri KulkarniPas encore d'évaluation
- PID Fan Speed Control For 4 Wire FansDocument11 pagesPID Fan Speed Control For 4 Wire FansShri KulkarniPas encore d'évaluation
- A Simple Water Monitoring System-With I2C CommunicationDocument20 pagesA Simple Water Monitoring System-With I2C CommunicationShri KulkarniPas encore d'évaluation
- Capacitive Sensors Offer Numerous AdvantagesDocument6 pagesCapacitive Sensors Offer Numerous AdvantagesShri KulkarniPas encore d'évaluation
- Capacitive Sensors Offer Numerous AdvantagesDocument6 pagesCapacitive Sensors Offer Numerous AdvantagesShri KulkarniPas encore d'évaluation
- A Semi-Cylindrical Capacitive Sensor Used For Soil Moisture MeasurementDocument6 pagesA Semi-Cylindrical Capacitive Sensor Used For Soil Moisture MeasurementShri KulkarniPas encore d'évaluation
- PIC16F152XX Family Programming SpecificationDocument39 pagesPIC16F152XX Family Programming SpecificationShri KulkarniPas encore d'évaluation
- Artigo - PLL - Synchronization TechniqueDocument6 pagesArtigo - PLL - Synchronization TechniqueAml LimaPas encore d'évaluation
- I2C Interface To Serial EEPROMDocument8 pagesI2C Interface To Serial EEPROMShri Kulkarni100% (1)
- Harmonic Detection Using Microcontroller PDFDocument4 pagesHarmonic Detection Using Microcontroller PDFShri KulkarniPas encore d'évaluation
- Electric Field in Infinite SheetDocument1 pageElectric Field in Infinite SheetShri KulkarniPas encore d'évaluation
- Electric Field of Charged RingDocument1 pageElectric Field of Charged RingShri KulkarniPas encore d'évaluation
- Introduction To Standards and Quality Control in Laboratory-1Document40 pagesIntroduction To Standards and Quality Control in Laboratory-1Shri KulkarniPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- A Review of Polarization Index and IEEE Standard 43-2000Document5 pagesA Review of Polarization Index and IEEE Standard 43-2000vasanth11kvPas encore d'évaluation
- BK 8309Document64 pagesBK 8309Dragan LazicPas encore d'évaluation
- 12th Physics One Mark Questions emDocument65 pages12th Physics One Mark Questions emRanjit Kumar67% (3)
- Dielectric Properties of Carbon From Cassava Starch Synthesized by Hydrothermal MethodDocument7 pagesDielectric Properties of Carbon From Cassava Starch Synthesized by Hydrothermal MethodDuy-Khiem NguyenPas encore d'évaluation
- Lab 205 - Parallel Plate CapacitorDocument3 pagesLab 205 - Parallel Plate CapacitorSamuel Chandru VasudevanPas encore d'évaluation
- 1.1.1 MSC Material Science SyllabusDocument51 pages1.1.1 MSC Material Science SyllabussanjeevchsPas encore d'évaluation
- Relay OmronDocument35 pagesRelay Omronhsn9belasPas encore d'évaluation
- 2ndpuc Physics Final QBDocument92 pages2ndpuc Physics Final QBAmit SutarPas encore d'évaluation
- Nanomaterials For Nonlinear Optical (Nlo) Applications: A ReviewDocument11 pagesNanomaterials For Nonlinear Optical (Nlo) Applications: A ReviewGowtham SpPas encore d'évaluation
- LL 5478Document2 pagesLL 5478Bash MatPas encore d'évaluation
- Fahaheel Al-Watanieh Indian Private School (DPS, Kuwait) Summer Holidays Home WorkDocument30 pagesFahaheel Al-Watanieh Indian Private School (DPS, Kuwait) Summer Holidays Home WorkDevanjali DebPas encore d'évaluation
- Ph501 Electrodynamics Problem Set 2: Princeton UniversityDocument30 pagesPh501 Electrodynamics Problem Set 2: Princeton UniversityDavidSuarezPas encore d'évaluation
- Dielectrics 2019Document103 pagesDielectrics 2019Varshith Ravikanti75% (4)
- Boundry ConditionDocument4 pagesBoundry ConditionrajasekarPas encore d'évaluation
- Electromagnetic Studies of Nickel Ferrite Synthesized by Microwave RouteDocument9 pagesElectromagnetic Studies of Nickel Ferrite Synthesized by Microwave RouteFatma MaharaniPas encore d'évaluation
- B.Tech (ECE) Course Scheme & Syllabus as per CBCSDocument168 pagesB.Tech (ECE) Course Scheme & Syllabus as per CBCSRatsihPas encore d'évaluation
- Fundamentals, Processes and ApplicationsDocument64 pagesFundamentals, Processes and ApplicationstrishulPas encore d'évaluation
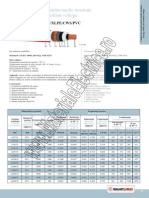
- Cabluri Medie Tensiune PDFDocument43 pagesCabluri Medie Tensiune PDFLeuce LaviniuPas encore d'évaluation
- Femm - Es: Exercises: 1 Planar Electrostatics 1Document9 pagesFemm - Es: Exercises: 1 Planar Electrostatics 1Juan David CarrilloPas encore d'évaluation
- B. Tech (CSE-CyberSecurity) Course StructureDocument74 pagesB. Tech (CSE-CyberSecurity) Course StructurePatlolla manvithaPas encore d'évaluation
- Ca 600 en 01Document20 pagesCa 600 en 01Alexander BakirovPas encore d'évaluation
- IEC Vocabulary IEC 60050Document1 pageIEC Vocabulary IEC 60050alvin mePas encore d'évaluation
- Maintenance Procedure For Switchyard Equipment Volume-II (EHV CBS, CTs Etc) PDFDocument39 pagesMaintenance Procedure For Switchyard Equipment Volume-II (EHV CBS, CTs Etc) PDFRAJESH PARIKSYAPas encore d'évaluation
- Lecture 1HV - Basics of High Voltage EngineeringDocument34 pagesLecture 1HV - Basics of High Voltage EngineeringFaizan AhmadPas encore d'évaluation
- Physics Unacademy Iconic NotesDocument52 pagesPhysics Unacademy Iconic NotesSANJAY J100% (2)
- 5kv Insulation Resistance Tester Hioki 3455Document4 pages5kv Insulation Resistance Tester Hioki 3455industrialindiaPas encore d'évaluation
- GPH 321-Survey DesignDocument127 pagesGPH 321-Survey DesignAdarta MuhPas encore d'évaluation
- Energy Storage in Capacitors With DielectricsDocument20 pagesEnergy Storage in Capacitors With DielectricsAli KılıçkayaPas encore d'évaluation
- Advancing EDM through fundamental insightsDocument24 pagesAdvancing EDM through fundamental insightsRaúl A. Laverde YepesPas encore d'évaluation
- New Crystal Structure and Discharge Efficiency of Poly (Vinylidene Uoride-Hexa Uoropropylene) /poly (Methyl Methacrylate) Blend FilmsDocument7 pagesNew Crystal Structure and Discharge Efficiency of Poly (Vinylidene Uoride-Hexa Uoropropylene) /poly (Methyl Methacrylate) Blend FilmssalmanPas encore d'évaluation