Vous aimerez peut-être aussi
- Preparatorio 1. Kuka Kr16 Kr5 Arc LDocument6 pagesPreparatorio 1. Kuka Kr16 Kr5 Arc LBenito CamelasPas encore d'évaluation
- Laboratorio 6 L298 Robótica UPNDocument6 pagesLaboratorio 6 L298 Robótica UPNPrimus 2018Pas encore d'évaluation
- Cinemática DirectaDocument30 pagesCinemática DirectajuanantoniorojasPas encore d'évaluation
- Laboratorio 5 Arduino Motor DC Robótica UPNDocument8 pagesLaboratorio 5 Arduino Motor DC Robótica UPNPrimus 2018Pas encore d'évaluation
- Primer Examen ParcialDocument3 pagesPrimer Examen ParcialDe La Cruz Quispe AbelPas encore d'évaluation
- Articulo Robot Kuka Kr16Document3 pagesArticulo Robot Kuka Kr16Ramiro LandezPas encore d'évaluation
- Desarrollo de Un Robot Móvil Con Brazo Robotica para La Gestion de Desastres Naturales - EF - Robotica IDocument5 pagesDesarrollo de Un Robot Móvil Con Brazo Robotica para La Gestion de Desastres Naturales - EF - Robotica IPrimus 2018Pas encore d'évaluation
- Matriz de TransformaciónDocument8 pagesMatriz de TransformaciónpactroPas encore d'évaluation
- KUKA AlimentosDocument16 pagesKUKA Alimentos77fenixPas encore d'évaluation
- Diseño y Prototipo de Un Robot ExploradorDocument11 pagesDiseño y Prototipo de Un Robot ExploradorFabian VillamarinPas encore d'évaluation
- Fase 4 RoboticaDocument6 pagesFase 4 RoboticaAnderson Javier Quintero ArgotyPas encore d'évaluation
- Ciclo 04 Ieln Teoría de Campos ElectromagnéticosDocument11 pagesCiclo 04 Ieln Teoría de Campos ElectromagnéticosRicardo asPas encore d'évaluation
- Laboratorio 7 Brazo Robótico Arduino Robótica UPNDocument8 pagesLaboratorio 7 Brazo Robótico Arduino Robótica UPNPrimus 2018Pas encore d'évaluation
- Tema4robotica Cinematica Inve R DirectaDocument32 pagesTema4robotica Cinematica Inve R DirectaGerson SalinasPas encore d'évaluation
- Fase3 299011 11Document14 pagesFase3 299011 11William FlorezPas encore d'évaluation
- UAP-IO-Módulo 1 PDFDocument82 pagesUAP-IO-Módulo 1 PDFJuanCarlosVargasPalominoPas encore d'évaluation
- Laboratorio 3 Servomotores Robótica UPNDocument5 pagesLaboratorio 3 Servomotores Robótica UPNPrimus 2018Pas encore d'évaluation
- Sistema Domótica DescentralizadoDocument21 pagesSistema Domótica DescentralizadoVivian PorcoPas encore d'évaluation
- Guia de Práctica 2 RoboticaDocument8 pagesGuia de Práctica 2 RoboticaJunior FigueroaPas encore d'évaluation
- 2 Localización EspacialDocument44 pages2 Localización EspacialkrisPas encore d'évaluation
- VHDLDocument34 pagesVHDLAnel VallarinoPas encore d'évaluation
- Capitulo4 Barrientos 8448156366Document68 pagesCapitulo4 Barrientos 8448156366nicolas casanovaPas encore d'évaluation
- Tce-Clase 03-2018Document23 pagesTce-Clase 03-2018ジョン カディクPas encore d'évaluation
- Experimentos de Circuitos Recortadores y Sujetadores Con DiodosDocument17 pagesExperimentos de Circuitos Recortadores y Sujetadores Con DiodosGovanna LunaPas encore d'évaluation
- Cinematic A Direct A RobotDocument72 pagesCinematic A Direct A RobotHans VilchezPas encore d'évaluation
- Fase 2 - Gabriela Restrepo PáezDocument12 pagesFase 2 - Gabriela Restrepo PáezMiguel Angel Mendigaño ArismendyPas encore d'évaluation
- Capítulo 3-El Campo Eléctrico en Medios Dieléctricos-Texto TCE-2015Document8 pagesCapítulo 3-El Campo Eléctrico en Medios Dieléctricos-Texto TCE-2015Marcox AntonioPas encore d'évaluation
- Presentación de PowerPointDocument28 pagesPresentación de PowerPointLUCY JESSENIA CASTA�EDA RUIZPas encore d'évaluation
- Cinemática Del RobotDocument16 pagesCinemática Del RobotGerson Siguenza DavalosPas encore d'évaluation
- Multiplexores y DemultiplexoresDocument12 pagesMultiplexores y DemultiplexoresInocencio AguayoPas encore d'évaluation
- Sistemas Control y RoboticaDocument56 pagesSistemas Control y Roboticadaniel buelvasPas encore d'évaluation
- Clase 01 Invope IDocument25 pagesClase 01 Invope ILuis Carlos Pimentel VignesPas encore d'évaluation
- Robótica Práctica 3 Unidad 2Document6 pagesRobótica Práctica 3 Unidad 2Fred MartinezPas encore d'évaluation
- Informe Proyecto Robotino PDFDocument9 pagesInforme Proyecto Robotino PDFSergio VeraPas encore d'évaluation
- Algoritmo de Denavit HartenbergDocument6 pagesAlgoritmo de Denavit HartenbergGil Robles LoyaPas encore d'évaluation
- Jhon Trabajo Sena....Document28 pagesJhon Trabajo Sena....Jhojan SuarezPas encore d'évaluation
- Modelo Dinamico de Un Robot de 3gdlDocument36 pagesModelo Dinamico de Un Robot de 3gdlRamón TovarPas encore d'évaluation
- Informe - Programacion KUKA KR16Document18 pagesInforme - Programacion KUKA KR16Luis Marcelo Robalino IbarraPas encore d'évaluation
- Tarea 4Document11 pagesTarea 4Daniela Gonzalez SanchezPas encore d'évaluation
- Lazo Abierto y Lazo CerradoDocument2 pagesLazo Abierto y Lazo CerradoHeidy Milena Diaz CardonaPas encore d'évaluation
- Examen Parcial de Sistemas de Control DigitalDocument4 pagesExamen Parcial de Sistemas de Control DigitalJose Carlos Huaman CasimiroPas encore d'évaluation
- Estudio de Mercado de Grabador CNC Con Interfaz Gráfica para Uso PúblicoDocument3 pagesEstudio de Mercado de Grabador CNC Con Interfaz Gráfica para Uso PúblicoDiego MuñozPas encore d'évaluation
- Taller Arduino PDFDocument72 pagesTaller Arduino PDFFredy ArandaPas encore d'évaluation
- Sistemas Embebidos Fase 2Document12 pagesSistemas Embebidos Fase 2alvaro Mosquera OrtizPas encore d'évaluation
- Cinemática Directa de RobotsDocument14 pagesCinemática Directa de RobotsWilliam Medina GómezPas encore d'évaluation
- Semana 08 Actividad Del TallerDocument51 pagesSemana 08 Actividad Del TallerROBERTO KARLO CAMPOS TIRADOPas encore d'évaluation
- Práctica 6 Electricidad y Magnetismo FESDocument15 pagesPráctica 6 Electricidad y Magnetismo FESManuel MejiaPas encore d'évaluation
- Clase 02 Invope IDocument16 pagesClase 02 Invope IAnonymous uKxrEpJ2vPas encore d'évaluation
- Práctica 01 Introducción A LaboratorioDocument8 pagesPráctica 01 Introducción A Laboratoriobartolome777ooPas encore d'évaluation
- Multiplexores y DemultiplexoresDocument3 pagesMultiplexores y DemultiplexoresCristian Chincha RicaldiPas encore d'évaluation
- Electronica DigitalDocument4 pagesElectronica DigitalVictor OnofrePas encore d'évaluation
- Aplicaciones de Circuitos DigitalesDocument15 pagesAplicaciones de Circuitos DigitalesAlex Pomier AliagaPas encore d'évaluation
- INTRODUCCIONDocument24 pagesINTRODUCCIONCruz Mary AncasiPas encore d'évaluation
- Control Cinemática de VelocidadDocument20 pagesControl Cinemática de VelocidadJose Maximo Alvarado OyolaPas encore d'évaluation
- Spez KR 1000 Titan EsDocument83 pagesSpez KR 1000 Titan Esjonathan gonzales peresPas encore d'évaluation
- KukaDocument67 pagesKukaVampy SacrificePas encore d'évaluation
- KR 1000 Titan Es H de Datos PDFDocument64 pagesKR 1000 Titan Es H de Datos PDFFerrenav SAPas encore d'évaluation
- Ba KR Quantec Ultra EsDocument241 pagesBa KR Quantec Ultra EsCarlos Avilés100% (1)
- Prácticas de refrigeración y aire acondicionadoD'EverandPrácticas de refrigeración y aire acondicionadoÉvaluation : 5 sur 5 étoiles5/5 (6)
- Zuleth Vallejo - Actividad 2Document6 pagesZuleth Vallejo - Actividad 2Zule VallejoPas encore d'évaluation
- Actividad 3Document2 pagesActividad 3Zule VallejoPas encore d'évaluation
- Actividad 3Document2 pagesActividad 3Zule VallejoPas encore d'évaluation
- Inf AutoresDocument1 pageInf AutoresZule VallejoPas encore d'évaluation
- Mason DasDocument3 pagesMason DasximemorettiPas encore d'évaluation
- Mapa MentalDocument1 pageMapa MentalZule VallejoPas encore d'évaluation
- Envio Actividad1 Evidencia2Document4 pagesEnvio Actividad1 Evidencia2Juan Luis M GPas encore d'évaluation
- Avance1 Robot ArañaDocument4 pagesAvance1 Robot ArañaZule VallejoPas encore d'évaluation
- E EmpresasDocument7 pagesE EmpresasZule VallejoPas encore d'évaluation
- Nomenclatura: Distancia Entre RuedasDocument4 pagesNomenclatura: Distancia Entre RuedasZule VallejoPas encore d'évaluation
- Solicit UdDocument1 pageSolicit UdZule VallejoPas encore d'évaluation
- Documentación Del Periodo Octubre 2016Document1 pageDocumentación Del Periodo Octubre 2016Zule VallejoPas encore d'évaluation
- OficioDocument1 pageOficioZule VallejoPas encore d'évaluation
- Laboratorio 3 - 2 Barco de TierraDocument2 pagesLaboratorio 3 - 2 Barco de TierraZule VallejoPas encore d'évaluation
- Clausula de Licencia de Uso de Publicacion de TesisDocument1 pageClausula de Licencia de Uso de Publicacion de TesisZule VallejoPas encore d'évaluation
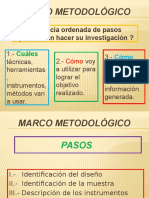
- Marco MetodológicoDocument15 pagesMarco MetodológicoZule VallejoPas encore d'évaluation
- Instructivo Asme Concurso Zuleth 2017Document5 pagesInstructivo Asme Concurso Zuleth 2017Zule VallejoPas encore d'évaluation
- Definiciones Gestion EmpresarialDocument9 pagesDefiniciones Gestion EmpresarialZule VallejoPas encore d'évaluation
- 11 - Instructivo Proyectos Integradores de InvestigaciónDocument21 pages11 - Instructivo Proyectos Integradores de InvestigaciónluisllalloPas encore d'évaluation
- Preguntas Música en El Periodo BarrocoDocument1 pagePreguntas Música en El Periodo BarrocoZule VallejoPas encore d'évaluation
- Artículo Dimensiones y Tipos de Innovación Grupo4 Gómez Vallejo Zurita Paredes MuñozDocument12 pagesArtículo Dimensiones y Tipos de Innovación Grupo4 Gómez Vallejo Zurita Paredes MuñozZule VallejoPas encore d'évaluation
- Documentación Del Periodo Octubre 2016Document1 pageDocumentación Del Periodo Octubre 2016Zule VallejoPas encore d'évaluation
- Documentación Del Periodo Octubre 2016Document1 pageDocumentación Del Periodo Octubre 2016Zule VallejoPas encore d'évaluation
- Diagrama de Flujo ArañaDocument1 pageDiagrama de Flujo ArañaZule VallejoPas encore d'évaluation
- Artículo Dimensiones y Tipos de Innovación Grupo4 Gómez Vallejo Zurita Paredes MuñozDocument12 pagesArtículo Dimensiones y Tipos de Innovación Grupo4 Gómez Vallejo Zurita Paredes MuñozZule VallejoPas encore d'évaluation
- MUSICADocument3 pagesMUSICAZule VallejoPas encore d'évaluation
- Normas Elaboracion de ArticulosDocument3 pagesNormas Elaboracion de ArticulosERik MuSoPas encore d'évaluation
- E EmpresasDocument7 pagesE EmpresasZule VallejoPas encore d'évaluation
- Avance1 Robot ArañaDocument4 pagesAvance1 Robot ArañaZule VallejoPas encore d'évaluation
- Raquel Olea Cielo DandiDocument8 pagesRaquel Olea Cielo DandiJuan Pablo SutherlandPas encore d'évaluation
- Trabajo Social Y Desarrollo de La InfanciaDocument55 pagesTrabajo Social Y Desarrollo de La InfanciaMaritza ReyesPas encore d'évaluation
- Ficha Tecnica Amarok v4 PDFDocument12 pagesFicha Tecnica Amarok v4 PDFb3r4y5hPas encore d'évaluation
- F-71 - Preoperacional Equipo de Oxicorte - V-01Document2 pagesF-71 - Preoperacional Equipo de Oxicorte - V-01maria orozco100% (1)
- Artículo2 - Importancia de Las Relaciones Interpersonales en El TraabajoDocument6 pagesArtículo2 - Importancia de Las Relaciones Interpersonales en El TraabajoladdyPas encore d'évaluation
- Romanos 1 7 para Ti Muestra PDFDocument20 pagesRomanos 1 7 para Ti Muestra PDFMoisés Cho100% (1)
- Libri To de Am or DivinoDocument195 pagesLibri To de Am or DivinoMiguel Angel Mociño GuadarramaPas encore d'évaluation
- Capitulo-3 Conducción Al 6sept2023Document26 pagesCapitulo-3 Conducción Al 6sept2023frajoahuPas encore d'évaluation
- Tecnicas ArteterapiaDocument3 pagesTecnicas ArteterapiaMimi Meraki100% (1)
- Actividades de La Unidad IV EspañolDocument5 pagesActividades de La Unidad IV Españolsolterito1188Pas encore d'évaluation
- Transfusion en PediatriaDocument23 pagesTransfusion en PediatriaConsultor ForestalPas encore d'évaluation
- Conde LucanorDocument10 pagesConde LucanorCandela Garrido GarciaPas encore d'évaluation
- Tema 5Document26 pagesTema 5Ma. Ximena OrtizPas encore d'évaluation
- Manual de Uso Motobomba EvansDocument8 pagesManual de Uso Motobomba EvansJohana PeñaPas encore d'évaluation
- Elasticidad CDR PDFDocument29 pagesElasticidad CDR PDFRoberth Alvaro Calderon RojasPas encore d'évaluation
- Teoría Elemental de Las Decisiones FamiliaresDocument11 pagesTeoría Elemental de Las Decisiones FamiliaresDome Zambrano Insuaste100% (1)
- Ensayo ÉticaDocument8 pagesEnsayo ÉticaGiselle Camila Orozco AislantPas encore d'évaluation
- PCA - Grupo de Cultura FisicaDocument5 pagesPCA - Grupo de Cultura Fisicajoice grefa50% (2)
- 480-Texto Del Artículo-1426-1-10-20160119Document10 pages480-Texto Del Artículo-1426-1-10-20160119Wenddy BarillasPas encore d'évaluation
- Guia Sonora Aves Alto San Miguel ComprimidoDocument248 pagesGuia Sonora Aves Alto San Miguel ComprimidoEl PapuPas encore d'évaluation
- Trigonometria Cuzcan 91020 Downloadable 3971038Document36 pagesTrigonometria Cuzcan 91020 Downloadable 3971038caleb pPas encore d'évaluation
- El Poder de La AlabanzaDocument14 pagesEl Poder de La AlabanzaMarco Antonio Zapata Martinez50% (2)
- Catalogo Husillos PDF DigitalDocument80 pagesCatalogo Husillos PDF DigitalKevin TorresPas encore d'évaluation
- Técnica A Cuatro ManosDocument63 pagesTécnica A Cuatro Manoscarlos santiago velasquez fournierPas encore d'évaluation
- Tesis Juana ImpresoDocument74 pagesTesis Juana ImpresoDARLINE ANAHI TICONA OJEDAPas encore d'évaluation
- Plantas Útiles de Un Ejido Tojolabal de Comitán, Chiapas, MéxicoDocument36 pagesPlantas Útiles de Un Ejido Tojolabal de Comitán, Chiapas, MéxicoCaleb Nahaliel Simuta VicentePas encore d'évaluation
- Diario - 2 6 22Document12 pagesDiario - 2 6 22FernandoPas encore d'évaluation
- Ipomoea BatatasDocument7 pagesIpomoea Batatasfulgenci0Pas encore d'évaluation
- InterculturalidadDocument4 pagesInterculturalidadjimmysatancoPas encore d'évaluation
- Angulos de Elevacion y Depresion PDFDocument2 pagesAngulos de Elevacion y Depresion PDFJosé Miguel Trejo100% (1)