Vous aimerez peut-être aussi
- Vibraciones TorsionalesDocument7 pagesVibraciones TorsionalesJimmy Eder Villanueva VelizPas encore d'évaluation
- Desbalanceo RotatorioDocument12 pagesDesbalanceo Rotatorioペラレス トマスPas encore d'évaluation
- Vibra Excitacion de Base 2019-1Document15 pagesVibra Excitacion de Base 2019-1R S Castro ChumpitazPas encore d'évaluation
- Teoría del cabeceo de ejes rotatorios debido a factores como desbalance, amortiguamiento e histéresisDocument12 pagesTeoría del cabeceo de ejes rotatorios debido a factores como desbalance, amortiguamiento e histéresisJohan Perez MunivePas encore d'évaluation
- 3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosDocument22 pages3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosJose ReginoPas encore d'évaluation
- Ejercicios VibracionesDocument4 pagesEjercicios VibracionesYahir AguilarPas encore d'évaluation
- Unidad 4-Balanceo de RotoresDocument6 pagesUnidad 4-Balanceo de Rotorescabobunbury10Pas encore d'évaluation
- Balanceo estático y dinámico de rotoresDocument7 pagesBalanceo estático y dinámico de rotoresCarlos IbarraPas encore d'évaluation
- Cuestionario III. Vibr-ForzadasDocument3 pagesCuestionario III. Vibr-Forzadaswesther0% (1)
- Expo DiseñoDocument34 pagesExpo DiseñoLinda de la RansPas encore d'évaluation
- Cinemática de La VibraciónDocument18 pagesCinemática de La VibraciónJoshua RomeroPas encore d'évaluation
- Unidad 3 Vibraciones de Sistemas de Un Grado de Libertad Con Excitacion ArmonicaDocument20 pagesUnidad 3 Vibraciones de Sistemas de Un Grado de Libertad Con Excitacion ArmonicaJesús CosLeyPas encore d'évaluation
- PDF VibracionesDocument86 pagesPDF VibracionesJellini MendozaPas encore d'évaluation
- Parcial #4 COJINETES DE DESLIZAMIENTO Y LUBRICACIONDocument3 pagesParcial #4 COJINETES DE DESLIZAMIENTO Y LUBRICACIONjgpdPas encore d'évaluation
- Configuracion Del EjeDocument6 pagesConfiguracion Del EjerudeyPas encore d'évaluation
- Diseño de flechas y elementos asociadosDocument82 pagesDiseño de flechas y elementos asociadosTAYRON IVAN MORA AGUILARPas encore d'évaluation
- Unidad 4. Aplicaciones de ControlDocument26 pagesUnidad 4. Aplicaciones de ControlArnold Vasquez0% (1)
- Diseño de EjesDocument10 pagesDiseño de Ejesandresgasca15Pas encore d'évaluation
- Dinamica Tarea 2Document1 pageDinamica Tarea 2ericka vargasPas encore d'évaluation
- Vibraciones MecánicasDocument16 pagesVibraciones Mecánicas1car31 SCPas encore d'évaluation
- 3.1 Se Cuelga Un Peso de 50 N de Un Resorte de 4 000 N/M de Rigidez y Se Somete A UnaDocument5 pages3.1 Se Cuelga Un Peso de 50 N de Un Resorte de 4 000 N/M de Rigidez y Se Somete A UnaAlejandra OlmedoPas encore d'évaluation
- UNIDAD 2 TEMA 5 Ventaja MecanicaDocument3 pagesUNIDAD 2 TEMA 5 Ventaja Mecanicacheco perezPas encore d'évaluation
- Balanceo dinámico de rotores por el método de los coeficientes de influenciaDocument38 pagesBalanceo dinámico de rotores por el método de los coeficientes de influenciaRommel LealPas encore d'évaluation
- Elementos de VibracionesDocument9 pagesElementos de VibracionesAlonso Ramírez100% (1)
- Balanceo de MotoresDocument60 pagesBalanceo de Motoresssws6Pas encore d'évaluation
- TF-DEMI - Cierre de Un Cofre de AutomóvilDocument20 pagesTF-DEMI - Cierre de Un Cofre de AutomóvilYosyPas encore d'évaluation
- Ensayo Unidad 4 Balanceo de RotoresDocument17 pagesEnsayo Unidad 4 Balanceo de RotoresEmmanuel TBPas encore d'évaluation
- Balanceo EstaticoDocument14 pagesBalanceo EstaticoMarycarmen MorenoPas encore d'évaluation
- Principios Del Balanceo de Rotores RigidosDocument5 pagesPrincipios Del Balanceo de Rotores RigidosGraciani LopezPas encore d'évaluation
- Diseño de máquina para ensayos de fatiga por flexiónDocument119 pagesDiseño de máquina para ensayos de fatiga por flexiónLuis Enrique FernandezPas encore d'évaluation
- Documento (2) 1Document27 pagesDocumento (2) 1Ángeles SuárezPas encore d'évaluation
- Dinamica Sacudimiento VolanteDocument30 pagesDinamica Sacudimiento VolanteAndres Vega FerreroPas encore d'évaluation
- Fuerzas ejercidas por un engranaje en un ejeDocument9 pagesFuerzas ejercidas por un engranaje en un ejeAna Karina CupeiroPas encore d'évaluation
- Normas Sobre El Diseño de EngranesDocument14 pagesNormas Sobre El Diseño de EngranesElton Guadarrama100% (1)
- Diseño de elementos de máquinas II: cojinetes de deslizamiento y lubricaciónDocument67 pagesDiseño de elementos de máquinas II: cojinetes de deslizamiento y lubricaciónJhalin GutierrezPas encore d'évaluation
- Unidad 5 Vibraciones MecanicasDocument24 pagesUnidad 5 Vibraciones MecanicasRaul Alain Ramirez CuadradoPas encore d'évaluation
- Clase 6 Sistemas de Dos Grados de LibertadDocument14 pagesClase 6 Sistemas de Dos Grados de LibertadEnrique De La Torre ReyesPas encore d'évaluation
- Cuestionario Capitulo 2 PDFDocument9 pagesCuestionario Capitulo 2 PDFAlelí MoreivaPas encore d'évaluation
- Embragues y Frenos de Contracción ExternaDocument14 pagesEmbragues y Frenos de Contracción ExternaVICTORPas encore d'évaluation
- 4.3 Balanceo Dinámico en Uno y Dos Planos Por El Método de Coeficientes de InfluenciaDocument22 pages4.3 Balanceo Dinámico en Uno y Dos Planos Por El Método de Coeficientes de InfluenciaEnrique FanesPas encore d'évaluation
- Carga Axial y Carga TorsiónDocument7 pagesCarga Axial y Carga TorsiónMiguel Angel MtzPas encore d'évaluation
- Diagramas de Desplazamientos y Diseño de Perfiles de Levas.Document8 pagesDiagramas de Desplazamientos y Diseño de Perfiles de Levas.Uriel Andrés Soria Hernández100% (2)
- Norma ISO 10816 para evaluar vibraciones en máquinasDocument29 pagesNorma ISO 10816 para evaluar vibraciones en máquinasCesar Quintana100% (1)
- Diseño de Un Tornillo Sin FinDocument15 pagesDiseño de Un Tornillo Sin FinJefferson Andrade Villarreal100% (1)
- Propiedades OrtogonalesDocument7 pagesPropiedades OrtogonalesCarlos HernandezPas encore d'évaluation
- LevasDocument40 pagesLevasDaniel HernandezPas encore d'évaluation
- Velocidad crítica de árboles o ejes elásticosDocument20 pagesVelocidad crítica de árboles o ejes elásticosedwar_12100% (1)
- Tarea 3 Unidad 2Document12 pagesTarea 3 Unidad 2Nogal SalePas encore d'évaluation
- Unidad 2 de Mecanica para La AutomatizaciónDocument5 pagesUnidad 2 de Mecanica para La AutomatizaciónPeQeeña SemPas encore d'évaluation
- Ejercicios de Aislamiento VibratorioDocument8 pagesEjercicios de Aislamiento VibratorioJOHAN GIANCARLO PONCE MENDOZAPas encore d'évaluation
- Balance de Exergia en Volumenes de ControlDocument10 pagesBalance de Exergia en Volumenes de ControlVazquez Perez IvanPas encore d'évaluation
- Balanceo de RotoresDocument3 pagesBalanceo de RotoresAnonymous eNwHxg6RPas encore d'évaluation
- TR - 2-1Document3 pagesTR - 2-1Eduardo GallegosPas encore d'évaluation
- Teoría de Fallas, Concentración de Esfuerzos y FatigaDocument32 pagesTeoría de Fallas, Concentración de Esfuerzos y FatigaJacob Vazquez Carrillo100% (2)
- Mecánica de Fluidos Ejercicios Unidad 4Document11 pagesMecánica de Fluidos Ejercicios Unidad 4Rulo Oo SaavedraPas encore d'évaluation
- Metodo Analitico Series de FourierDocument12 pagesMetodo Analitico Series de FourierVampy Sacrifice100% (1)
- Vibraciones Consulta Causas VibracionesDocument13 pagesVibraciones Consulta Causas VibracionesVULEBART BARTPas encore d'évaluation
- Dese Quil I BrioDocument6 pagesDese Quil I BrioalexisPas encore d'évaluation
- Vibracion en MaquinasDocument5 pagesVibracion en MaquinasIvan AcostaPas encore d'évaluation
- Historia ChadwckDocument20 pagesHistoria ChadwckJuan AzabachePas encore d'évaluation
- Central Termoeléctrica de Ciclo HíbridoDocument29 pagesCentral Termoeléctrica de Ciclo HíbridodricardocanPas encore d'évaluation
- Herramientas de CorteDocument9 pagesHerramientas de CortedricardocanPas encore d'évaluation
- Proyecto Corte de MaterialesDocument21 pagesProyecto Corte de Materialesdricardocan100% (1)
- Diseño Automático GalvanoplastiaDocument22 pagesDiseño Automático GalvanoplastiadricardocanPas encore d'évaluation
- Tesis Generador AxialDocument123 pagesTesis Generador AxialdricardocanPas encore d'évaluation
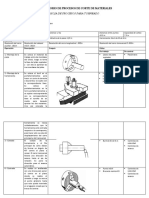
- Hoja de Procesos de TorneadoDocument5 pagesHoja de Procesos de TorneadodricardocanPas encore d'évaluation
- Planos de Generador AxialDocument32 pagesPlanos de Generador AxialdricardocanPas encore d'évaluation
- Calculos GalvanoplastiaDocument4 pagesCalculos Galvanoplastiadricardocan100% (2)
- Expo Eq. de SeparacionDocument47 pagesExpo Eq. de SeparaciondricardocanPas encore d'évaluation
- Analisis QFD GalvanoplastiaDocument11 pagesAnalisis QFD GalvanoplastiadricardocanPas encore d'évaluation
- Plan de Trabajo - GalvanoplastiaDocument14 pagesPlan de Trabajo - GalvanoplastiadricardocanPas encore d'évaluation
- Practica MetrologiaDocument8 pagesPractica MetrologiadricardocanPas encore d'évaluation
- Calculo de Eficiencia de CalderaDocument8 pagesCalculo de Eficiencia de CalderadricardocanPas encore d'évaluation
- Proceso de GalvanoplastiaDocument6 pagesProceso de GalvanoplastiadricardocanPas encore d'évaluation
- Reingenieria de Manufactura MecanicaDocument19 pagesReingenieria de Manufactura MecanicadricardocanPas encore d'évaluation
- Gestion de EnergiaDocument34 pagesGestion de EnergiadricardocanPas encore d'évaluation
- Proyecto - Celdas SolaresDocument6 pagesProyecto - Celdas SolaresdricardocanPas encore d'évaluation
- Expo - Normas de SeparacionDocument10 pagesExpo - Normas de SeparaciondricardocanPas encore d'évaluation
- Normas ISO VibracionesDocument11 pagesNormas ISO Vibracionesdricardocan100% (2)
- Apuntes de Diseño Por ComputadoraDocument21 pagesApuntes de Diseño Por ComputadoradricardocanPas encore d'évaluation
- Apuntes - Evaluacion de ProyectosDocument53 pagesApuntes - Evaluacion de ProyectosdricardocanPas encore d'évaluation
- Transferencia de Calor de Dos FasesDocument8 pagesTransferencia de Calor de Dos FasesdricardocanPas encore d'évaluation
- Instrumentacion en Medicion de VibracionesDocument6 pagesInstrumentacion en Medicion de VibracionesdricardocanPas encore d'évaluation
- Diseño de Una CalderaDocument6 pagesDiseño de Una CalderadricardocanPas encore d'évaluation
- Empresa de CitricosDocument14 pagesEmpresa de CitricosdricardocanPas encore d'évaluation
- Expo Mejora ContinuaDocument19 pagesExpo Mejora Continuadricardocan100% (1)
- Vibraciones en TuberiasDocument5 pagesVibraciones en TuberiasdricardocanPas encore d'évaluation
- Practica6 - Motor de VaporDocument8 pagesPractica6 - Motor de Vapordricardocan100% (1)
- Trabajo Final Torre de EnfriamientoDocument17 pagesTrabajo Final Torre de Enfriamientodricardocan100% (1)
- Reglamento Tecnico 2017 Categoria - 150CC 4T VarilleroDocument8 pagesReglamento Tecnico 2017 Categoria - 150CC 4T VarillerocarrizofPas encore d'évaluation
- Fluidos, presión y circuitos neumáticos e hidráulicosDocument25 pagesFluidos, presión y circuitos neumáticos e hidráulicosClaudia ValenciaPas encore d'évaluation
- Brochure Ecr58 Stagev Es 33 20059173 BDocument16 pagesBrochure Ecr58 Stagev Es 33 20059173 BSebastian MolinaPas encore d'évaluation
- 9 - Sistema AutomotrizDocument14 pages9 - Sistema AutomotrizJuan Carlos Inga VasquezPas encore d'évaluation
- ColumnaDocument11 pagesColumnaharoldPas encore d'évaluation
- Cap - 02 Elementos de Circuitos Electricos AutomóvilDocument44 pagesCap - 02 Elementos de Circuitos Electricos AutomóvilDARWIN CHELEPas encore d'évaluation
- Formulario MifDocument5 pagesFormulario MifMarioPas encore d'évaluation
- Desmontar y montar la bomba de líquido refrigeranteDocument5 pagesDesmontar y montar la bomba de líquido refrigeranteInerPas encore d'évaluation
- Texto de Cap 6 Thermo 8va Edicion para Entregar PDFDocument12 pagesTexto de Cap 6 Thermo 8va Edicion para Entregar PDFSERGIO DARIO QUINTERO MENESESPas encore d'évaluation
- Resumen Capacidad de CargaDocument3 pagesResumen Capacidad de Cargamasster123Pas encore d'évaluation
- Diseño Estación de BombeoDocument39 pagesDiseño Estación de BombeoHenry100% (6)
- 3-Presentacion Modulo 03 Modificado DEQF PDFDocument170 pages3-Presentacion Modulo 03 Modificado DEQF PDFJohnPortugalAlmeida100% (3)
- Diapositivas MantenimientoDocument40 pagesDiapositivas MantenimientoFelipe AcevedoPas encore d'évaluation
- Analisis Estatico - Brazo de ExcavadoraDocument32 pagesAnalisis Estatico - Brazo de ExcavadoraRoger Urquiaga Sandoval50% (2)
- Informe Scania PDFDocument16 pagesInforme Scania PDFelbandolero789Pas encore d'évaluation
- TP Volcador de Bins 2021 Rev00Document6 pagesTP Volcador de Bins 2021 Rev00Pablo Alexis NavarroPas encore d'évaluation
- Planta de Beneficio Oroconcent S.ADocument1 pagePlanta de Beneficio Oroconcent S.AJoseph ManuelPas encore d'évaluation
- Llantas StarfireDocument22 pagesLlantas Starfireverlo800502Pas encore d'évaluation
- Operaciones de maquinado y máquinas herramientaDocument1 pageOperaciones de maquinado y máquinas herramientadanielaPas encore d'évaluation
- Control de Deflexiones y FisurasDocument31 pagesControl de Deflexiones y FisurasMAYCOL DANY ALBERTO PIZARROPas encore d'évaluation
- TP Termodinamica Parte 3Document2 pagesTP Termodinamica Parte 3Verónica Elina RubelPas encore d'évaluation
- T1 Psicrometria ComplementosDocument8 pagesT1 Psicrometria ComplementosLucasPas encore d'évaluation
- Generador Corriente DirectaDocument6 pagesGenerador Corriente DirectaJONATHAN ISRAEL AGUILAR CONTRERASPas encore d'évaluation
- Cambio de válvulas y reempaque en subestaciónDocument64 pagesCambio de válvulas y reempaque en subestacióndarkzero20Pas encore d'évaluation
- Modelado de Sistemas FísicosDocument8 pagesModelado de Sistemas FísicosJosé Carlos Gil PrietoPas encore d'évaluation
- Sostenimiento Con Madera PDFDocument81 pagesSostenimiento Con Madera PDFWester Felix Huarcaya86% (7)
- Pet-Osermin-Proy-014 - Soldadura ElectricaDocument2 pagesPet-Osermin-Proy-014 - Soldadura ElectricaGerson Santiago EspinozaPas encore d'évaluation
- Plan de EstudioDocument5 pagesPlan de EstudioCristhian Sonco CruzPas encore d'évaluation
- Calculo de Engranajes de Dientes Inclinados o HelicoidalesDocument5 pagesCalculo de Engranajes de Dientes Inclinados o HelicoidalesElsa MoralesPas encore d'évaluation
- I.21 SOLDADURA WPS-PQR Rev.01Document14 pagesI.21 SOLDADURA WPS-PQR Rev.01LISSETTE ALARCONPas encore d'évaluation