Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Problems and Solutions For Complex AnalysisDocument259 pagesProblems and Solutions For Complex AnalysisMete Torun91% (34)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Mat495 Chapter 8Document18 pagesMat495 Chapter 8MuhamadSadiqPas encore d'évaluation
- Oops Level 1 Oops ElabDocument59 pagesOops Level 1 Oops ElabChellamuthu HaripriyaPas encore d'évaluation
- Ghana Building Code Part 5 - LoadsDocument83 pagesGhana Building Code Part 5 - LoadsRichard NarteyPas encore d'évaluation
- Software Environment For Online Simulation of Switched Reluctance MachinesDocument25 pagesSoftware Environment For Online Simulation of Switched Reluctance Machinesarnika33Pas encore d'évaluation
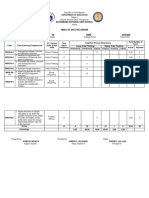
- Tos Math 8 3RD QuarterDocument2 pagesTos Math 8 3RD Quarterrmm041550% (2)
- Flanagan Industrial TestsDocument1 pageFlanagan Industrial TestsIsrael Alvarez100% (2)
- Design of A 43kW Switched Reluctance Machine For A High-Performance Hybrid Electric VehicleDocument6 pagesDesign of A 43kW Switched Reluctance Machine For A High-Performance Hybrid Electric Vehiclearnika33Pas encore d'évaluation
- Novel Permanent Magnet Tubular Linear Generator For Wave Energy ConvertersDocument5 pagesNovel Permanent Magnet Tubular Linear Generator For Wave Energy Convertersarnika33Pas encore d'évaluation
- Design and Fabrication of Magnetic Engine: Ganesh Bairavan.P, Anojan.TDocument5 pagesDesign and Fabrication of Magnetic Engine: Ganesh Bairavan.P, Anojan.Tarnika33Pas encore d'évaluation
- A Survey On Rotary-Linear Motors Used in Emerging ApplicationsDocument6 pagesA Survey On Rotary-Linear Motors Used in Emerging Applicationsarnika33Pas encore d'évaluation
- Control of Switched Reluctance Motor by Current Profiling Under Normal and Open Phase Operating ConditionDocument9 pagesControl of Switched Reluctance Motor by Current Profiling Under Normal and Open Phase Operating Conditionarnika33Pas encore d'évaluation
- Optimization of New Geometries of Switched Reluctances Motors Using FEM and Multi Objective Genetic AlgorithmDocument16 pagesOptimization of New Geometries of Switched Reluctances Motors Using FEM and Multi Objective Genetic Algorithmarnika33Pas encore d'évaluation
- On The Use of Rotary-Linear Generators in Floating Hybrid Wind and Wave Energy Conversion SystemsDocument6 pagesOn The Use of Rotary-Linear Generators in Floating Hybrid Wind and Wave Energy Conversion Systemsarnika33Pas encore d'évaluation
- Cannizzaro 2016 JEDocument7 pagesCannizzaro 2016 JEarnika33Pas encore d'évaluation
- Cannizzaro 2016 JEDocument7 pagesCannizzaro 2016 JEarnika33Pas encore d'évaluation
- Using Maximum Correlated Kurtosis Deconvolution Method in The Bearing Fault Detection of Wind Turbine GeneratorsDocument4 pagesUsing Maximum Correlated Kurtosis Deconvolution Method in The Bearing Fault Detection of Wind Turbine Generatorsarnika33Pas encore d'évaluation
- FEM Based Prototype of Moving-Coil Coreless Linear-Generator (MCCLG) For Wave Energy ExtractionDocument6 pagesFEM Based Prototype of Moving-Coil Coreless Linear-Generator (MCCLG) For Wave Energy Extractionarnika33Pas encore d'évaluation
- Design and Fabrication of Magnetic Engine: Ganesh Bairavan.P, Anojan.TDocument5 pagesDesign and Fabrication of Magnetic Engine: Ganesh Bairavan.P, Anojan.Tarnika33Pas encore d'évaluation
- Preliminary Comparative Study of Several Structures of Permanent-Magnet Synchronous Generator Used in Wind Energy System OptimizationDocument9 pagesPreliminary Comparative Study of Several Structures of Permanent-Magnet Synchronous Generator Used in Wind Energy System Optimizationarnika33Pas encore d'évaluation
- 03 Paper 1010 CepoiDocument6 pages03 Paper 1010 Cepoiarnika33Pas encore d'évaluation
- Developing Control Techniques For Two-Coordinate Planar Positioning Systems by Means of Coupled Advanced Simulation ToolsDocument6 pagesDeveloping Control Techniques For Two-Coordinate Planar Positioning Systems by Means of Coupled Advanced Simulation Toolsarnika33Pas encore d'évaluation
- The History of Using Solar EnergyDocument8 pagesThe History of Using Solar Energyarnika33Pas encore d'évaluation
- The Determination of Effects of Primary and Secondary Geometry of Tubular Linear GeneratorDocument6 pagesThe Determination of Effects of Primary and Secondary Geometry of Tubular Linear Generatorarnika33Pas encore d'évaluation
- Using Maximum Correlated Kurtosis Deconvolution Method in The Bearing Fault Detection of Wind Turbine GeneratorsDocument4 pagesUsing Maximum Correlated Kurtosis Deconvolution Method in The Bearing Fault Detection of Wind Turbine Generatorsarnika33Pas encore d'évaluation
- Wavelet Transform Approach To Rotor Faults Detection in Induction MotorsDocument6 pagesWavelet Transform Approach To Rotor Faults Detection in Induction Motorsarnika33Pas encore d'évaluation
- Ferkova 2017 EDPEDocument4 pagesFerkova 2017 EDPEarnika33Pas encore d'évaluation
- The History of Using Solar EnergyDocument8 pagesThe History of Using Solar Energyarnika33Pas encore d'évaluation
- Direct Drive System With Two Phase Transverse Flux Disc-Type MotorDocument6 pagesDirect Drive System With Two Phase Transverse Flux Disc-Type Motorarnika33Pas encore d'évaluation
- Computer Aided Modeling and Simulation of Bio-Inspired Hardware SystemsDocument6 pagesComputer Aided Modeling and Simulation of Bio-Inspired Hardware Systemsarnika33Pas encore d'évaluation
- Transverse Flux Motor Drive DynamicsDocument4 pagesTransverse Flux Motor Drive Dynamicsarnika33Pas encore d'évaluation
- Modular Stator Switched Reluctance Motor For Fault Tolerant Drive SystemsDocument11 pagesModular Stator Switched Reluctance Motor For Fault Tolerant Drive Systemsarnika33Pas encore d'évaluation
- Comparative Study of Switched and Synchronous Reluctance Machines For Electric PropulsionDocument4 pagesComparative Study of Switched and Synchronous Reluctance Machines For Electric Propulsionarnika33Pas encore d'évaluation
- The Evolution of CapacitorsDocument5 pagesThe Evolution of Capacitorsarnika33Pas encore d'évaluation
- Torque Smoothing of A Fault Tolerant Segmental Stator Switched Reluctance MotorDocument7 pagesTorque Smoothing of A Fault Tolerant Segmental Stator Switched Reluctance Motorarnika33Pas encore d'évaluation
- Friends Global 10 - Unit 6 - Grammar TestDocument3 pagesFriends Global 10 - Unit 6 - Grammar TestThảo NgôPas encore d'évaluation
- Splay TreeDocument7 pagesSplay TreePraveen YadavPas encore d'évaluation
- Chapter 3 - Multiple Random Variables-UpdatedDocument25 pagesChapter 3 - Multiple Random Variables-Updatedfarouq_razzaz2574Pas encore d'évaluation
- All Cases of HCF & LCMDocument10 pagesAll Cases of HCF & LCMmail.kaivalyasharma14Pas encore d'évaluation
- Classification Algorithms IIDocument9 pagesClassification Algorithms IIJayod RajapakshaPas encore d'évaluation
- Propensity Toward Indebtednes - Evidence From MalaysiaDocument13 pagesPropensity Toward Indebtednes - Evidence From MalaysiaWihelmina DeaPas encore d'évaluation
- M&SCE NotesPart IDocument65 pagesM&SCE NotesPart IHassane AmadouPas encore d'évaluation
- Probability DistributionDocument8 pagesProbability DistributionDaizy May U. NovesterasPas encore d'évaluation
- Concept of StrategyDocument3 pagesConcept of StrategyvikasmishraelexPas encore d'évaluation
- VHDL CodesDocument9 pagesVHDL CodesSaneesh KarayilPas encore d'évaluation
- Calculus 2 - Chapter 5 PDFDocument14 pagesCalculus 2 - Chapter 5 PDFSilverwolf CerberusPas encore d'évaluation
- Colegio de San Gabriel Arcangel of Caloocan, Inc. Escuela San Gabriel de Arcangel FoundationDocument8 pagesColegio de San Gabriel Arcangel of Caloocan, Inc. Escuela San Gabriel de Arcangel FoundationJasmine BalbinPas encore d'évaluation
- ABACUS Features USDocument2 pagesABACUS Features USSuzanne StewartPas encore d'évaluation
- Pengaruh Media Sosial Instagram Dan Whatsapp Terhadap Pembentukan Budaya "Alone Together"Document12 pagesPengaruh Media Sosial Instagram Dan Whatsapp Terhadap Pembentukan Budaya "Alone Together"Muhammad Farhan SyahPas encore d'évaluation
- 0580 s17 QP 22Document12 pages0580 s17 QP 22yuke kristinaPas encore d'évaluation
- GplayDocument9 pagesGplayΣατανάς ΣατανάςPas encore d'évaluation
- Trust-In Machine Learning ModelsDocument11 pagesTrust-In Machine Learning Modelssmartin1970Pas encore d'évaluation
- Pyramid Development Tutorial 1 PDFDocument9 pagesPyramid Development Tutorial 1 PDFapi-230614113Pas encore d'évaluation
- Visual VocabDocument10 pagesVisual Vocabnellie_74023951Pas encore d'évaluation
- Dataforth Elit PDFDocument310 pagesDataforth Elit PDFDougie ChanPas encore d'évaluation
- A Shortcoming in The Geometrically Non-Linear Shakedown TheoremDocument2 pagesA Shortcoming in The Geometrically Non-Linear Shakedown TheoremRui CbPas encore d'évaluation
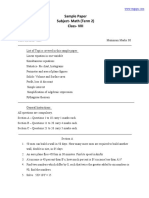
- Sample Paper Subject-Math (Term 2) Class - VIIIDocument3 pagesSample Paper Subject-Math (Term 2) Class - VIIIGayathiri BalajiPas encore d'évaluation
- Sample Solution Midterm 2Document9 pagesSample Solution Midterm 2Ferdinand MangaoangPas encore d'évaluation