Vous aimerez peut-être aussi
- Ardu5 para S4ADocument6 pagesArdu5 para S4AEDWARD ENRIQUE ROJAS BARBOSAPas encore d'évaluation
- How To Make An Arduino Radar - HowToMechatronicsDocument11 pagesHow To Make An Arduino Radar - HowToMechatronicsYsaías Samanez VeraPas encore d'évaluation
- Tutorial 8 Demo AssignmentDocument9 pagesTutorial 8 Demo Assignmentnawaz.ahmed.spnutra.comPas encore d'évaluation
- Chapter 7 and 8Document12 pagesChapter 7 and 8Amruta AvhalePas encore d'évaluation
- The Ultrasonic SensorDocument14 pagesThe Ultrasonic SensorAdalberto Sharpley100% (1)
- Controler PDFDocument15 pagesControler PDFKhoiril HudaPas encore d'évaluation
- Embedded Rev ThreeDocument12 pagesEmbedded Rev ThreeishmaelnjihiaPas encore d'évaluation
- How To Read Encoder Speed Through An Interrupt With An Arduino Based PLC's - Industrial ShieldsDocument5 pagesHow To Read Encoder Speed Through An Interrupt With An Arduino Based PLC's - Industrial ShieldsBruno CoutoPas encore d'évaluation
- EeDocument12 pagesEepriyaPas encore d'évaluation
- Flight ControllerDocument30 pagesFlight ControllerUsama FaisalPas encore d'évaluation
- Chapter 7,8,9,10Document16 pagesChapter 7,8,9,10Amruta AvhalePas encore d'évaluation
- PID Control ArdunioDocument8 pagesPID Control ArdunioSyed Abdul Haseeb AhmedPas encore d'évaluation
- EnergiaDocument15 pagesEnergiaDaniel V Sam100% (1)
- 4 - 1 Arduino Basic Functions - 1Document7 pages4 - 1 Arduino Basic Functions - 1ankita81123singhPas encore d'évaluation
- CPEN 100 Laboratory No. 4Document8 pagesCPEN 100 Laboratory No. 4Jiever AustriaPas encore d'évaluation
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Document7 pagesHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Presentation 1Document24 pagesPresentation 1Hazem Osman 2512Pas encore d'évaluation
- XSIM Telemetry Data To MotorsDocument10 pagesXSIM Telemetry Data To MotorsperrociegoPas encore d'évaluation
- Sensors and Sensing Lab 1: Arduino Motor Control and ROSDocument7 pagesSensors and Sensing Lab 1: Arduino Motor Control and ROSFebri Rizky PratamaPas encore d'évaluation
- 2 Axis Gimbal Brushless With l298nDocument9 pages2 Axis Gimbal Brushless With l298nMano OhanianPas encore d'évaluation
- Standard Firmata EthernetDocument34 pagesStandard Firmata Ethernetsoo chiPas encore d'évaluation
- Lab Assignment 10 Wheel Encoders-1Document5 pagesLab Assignment 10 Wheel Encoders-1api-519059218Pas encore d'évaluation
- Guia Motor EsDocument26 pagesGuia Motor EsrenatocuevasanchezPas encore d'évaluation
- Gyro Camera For Motorcycle Using ArduinoDocument8 pagesGyro Camera For Motorcycle Using ArduinoCUIDAITOPas encore d'évaluation
- Firmata WIFIDocument37 pagesFirmata WIFIsoo chiPas encore d'évaluation
- USB ThermometerDocument40 pagesUSB ThermometerTheodøros D' SpectrøømPas encore d'évaluation
- ROBOTICS Lab ManualDocument7 pagesROBOTICS Lab Manualparidhi kaushikPas encore d'évaluation
- DC Motor Control LabDocument10 pagesDC Motor Control LabShankarSridharPas encore d'évaluation
- Arduino Clinic 2Document24 pagesArduino Clinic 2Benjamin Dover100% (1)
- Basic Servo ControlDocument9 pagesBasic Servo ControlVinicius100% (1)
- EDM18B010 - Expt4-Embedded System Design PracticeDocument9 pagesEDM18B010 - Expt4-Embedded System Design PracticeCHIRAG C M CHIRAG C MPas encore d'évaluation
- Connect Motor Controller Pins To Arduino Digital PinsDocument5 pagesConnect Motor Controller Pins To Arduino Digital PinsMuhammadAkbarAsis100% (1)
- Include IncludeDocument8 pagesInclude IncludeAhmet TuncaPas encore d'évaluation
- This Lesson Will Teach You To Turn On and Off Leds Using WebpageDocument24 pagesThis Lesson Will Teach You To Turn On and Off Leds Using WebpageSedrex De Veas CastilloPas encore d'évaluation
- Lab 1Document9 pagesLab 1Malik YousafPas encore d'évaluation
- Assignment 3Document18 pagesAssignment 3Bhakti KalyankasturePas encore d'évaluation
- Arduino - Control ESC - Motor (Arduino Code)Document7 pagesArduino - Control ESC - Motor (Arduino Code)ordenador90Pas encore d'évaluation
- Controlling NEMA-17 Stepper Motor Speed With Trimpot Without Using DelayDocument2 pagesControlling NEMA-17 Stepper Motor Speed With Trimpot Without Using DelaySandeep KumarPas encore d'évaluation
- AK SeriesDocument10 pagesAK Series徐義勝Pas encore d'évaluation
- S4AFirmware16 InoDocument5 pagesS4AFirmware16 InoribazetaPas encore d'évaluation
- Arduino Workshoop LoeDocument8 pagesArduino Workshoop Loetalha.k.rajpootPas encore d'évaluation
- 04 SpeedControlDocument5 pages04 SpeedControlAngel ChicchonPas encore d'évaluation
- Arduino - CalibrationDocument5 pagesArduino - CalibrationJose Maria Silva PimentaPas encore d'évaluation
- Arduino Basic SoftwareDocument12 pagesArduino Basic Software21bee141Pas encore d'évaluation
- Kuka Youbot Hardware Interfaces: Jan Paulus Bonn-Rhein-Sieg UniversityDocument36 pagesKuka Youbot Hardware Interfaces: Jan Paulus Bonn-Rhein-Sieg UniversityLuan MoraisPas encore d'évaluation
- Proiecte ArduinoDocument46 pagesProiecte ArduinoSyad AlyPas encore d'évaluation
- Interface RF ModuleDocument22 pagesInterface RF ModulesaranyaammuPas encore d'évaluation
- Chapter 05 How To Control Servo Motor Using PythonDocument5 pagesChapter 05 How To Control Servo Motor Using Python0xbitPas encore d'évaluation
- Microcontrollers LabDocument19 pagesMicrocontrollers LabAMARNATHNAIDU77Pas encore d'évaluation
- Arduino Irf520 Mosfet Driver ModuleDocument11 pagesArduino Irf520 Mosfet Driver ModuleSisil BandaraPas encore d'évaluation
- Ecen90 Robot Arle HernandezDocument12 pagesEcen90 Robot Arle HernandezCenon Lumabad IIIPas encore d'évaluation
- Chap 05Document5 pagesChap 05Asif Ullah KhanPas encore d'évaluation
- Chapter 1 Challenges: The Arduino ModuleDocument7 pagesChapter 1 Challenges: The Arduino Moduleapi-357698220Pas encore d'évaluation
- SoC - Lab ReportDocument19 pagesSoC - Lab ReportJuan VALVERDEPas encore d'évaluation
- Truong Van DatDocument6 pagesTruong Van Datlequocthai180qPas encore d'évaluation
- Arduino Pid Motor ControlDocument18 pagesArduino Pid Motor ControlwinkyiPas encore d'évaluation
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkD'EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkPas encore d'évaluation
- Projects With Microcontrollers And PICCD'EverandProjects With Microcontrollers And PICCÉvaluation : 5 sur 5 étoiles5/5 (1)
- Absen TkendaliDocument4 pagesAbsen TkendaliAl MtdrsPas encore d'évaluation
- 1.listing Program Ardino (Pitct Terbang Keatas)Document7 pages1.listing Program Ardino (Pitct Terbang Keatas)Al MtdrsPas encore d'évaluation
- Cover TMC 2 2024Document1 pageCover TMC 2 2024Al MtdrsPas encore d'évaluation
- Quadcopter Capability Development For Additional Low Voltage DistributionDocument8 pagesQuadcopter Capability Development For Additional Low Voltage DistributionAl MtdrsPas encore d'évaluation
- Effective Power Output Single Phase Inverter Design in Home Scale Application With Arduino Microcontroller As Control PulseDocument5 pagesEffective Power Output Single Phase Inverter Design in Home Scale Application With Arduino Microcontroller As Control PulseAl MtdrsPas encore d'évaluation
- 1kw InverterDocument13 pages1kw InverterAl MtdrsPas encore d'évaluation
- An Improved Single Phase Full Bridge Inverter Using Sequential Triggering For Achieving Zero Voltage Without InductorDocument9 pagesAn Improved Single Phase Full Bridge Inverter Using Sequential Triggering For Achieving Zero Voltage Without InductorAl MtdrsPas encore d'évaluation
- Yoo ThesisDocument166 pagesYoo ThesisAl MtdrsPas encore d'évaluation
- 4 Areen Shankar PDFDocument5 pages4 Areen Shankar PDFAl MtdrsPas encore d'évaluation
- Data Sheet: Sales: 01206 751166 Technical: 01206 835555 Fax: 01206 751188 Sales@rapidelec - Co.uk Tech@rapidelec - Co.ukDocument2 pagesData Sheet: Sales: 01206 751166 Technical: 01206 835555 Fax: 01206 751188 Sales@rapidelec - Co.uk Tech@rapidelec - Co.ukAl MtdrsPas encore d'évaluation
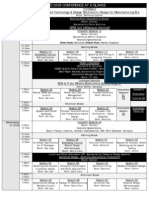
- ISQED08 Program v3Document48 pagesISQED08 Program v3Al MtdrsPas encore d'évaluation
- Development of Rfid Tag For Elctrical Equipment ConditionDocument25 pagesDevelopment of Rfid Tag For Elctrical Equipment ConditionAl MtdrsPas encore d'évaluation
- Successive Approximation ADC: For Behaviorist B.F. Skinner's Method of Guiding Learned Behavior, SeeDocument6 pagesSuccessive Approximation ADC: For Behaviorist B.F. Skinner's Method of Guiding Learned Behavior, SeeAl MtdrsPas encore d'évaluation
- Theoretical Optics: Pre Pared By: Je Nno S - La Ntaya, OdDocument27 pagesTheoretical Optics: Pre Pared By: Je Nno S - La Ntaya, OdDyra Kim QuintanaPas encore d'évaluation
- Astm D 3612 - 01Document24 pagesAstm D 3612 - 01mtuankctPas encore d'évaluation
- Superstructure For Wheel-Rail-Traffic: Interaction Between Rail and BridgeDocument20 pagesSuperstructure For Wheel-Rail-Traffic: Interaction Between Rail and BridgeMadhurimaMitraPas encore d'évaluation
- Advanced Welding TechologyDocument6 pagesAdvanced Welding TechologydearsaswatPas encore d'évaluation
- Design of An Energy Efficient High Performance Drive Train: Loek MarquenieDocument116 pagesDesign of An Energy Efficient High Performance Drive Train: Loek MarqueniePratik PrakashPas encore d'évaluation
- CBSE Class 5 Mathematics Worksheet - RevisionDocument2 pagesCBSE Class 5 Mathematics Worksheet - RevisionzubairPas encore d'évaluation
- Density of Rocks Lab WorksheetDocument6 pagesDensity of Rocks Lab Worksheetadaglio001100% (1)
- Introduction To Magnetism and Magnetic Materials: David JilesDocument5 pagesIntroduction To Magnetism and Magnetic Materials: David JilesAmreshAman0% (1)
- 2.mean Value TheoremsDocument29 pages2.mean Value TheoremsPratyush SrivastavaPas encore d'évaluation
- Failure Analysis of Storage TankDocument13 pagesFailure Analysis of Storage TankDavid Rodrigues100% (1)
- Lab Activity No. 3Document2 pagesLab Activity No. 3Vannareneal SalesaPas encore d'évaluation
- Chapter 2Document34 pagesChapter 2aberamamo15Pas encore d'évaluation
- Uniform Open Channel Flow-R1Document25 pagesUniform Open Channel Flow-R1Kenn Wahh100% (1)
- LEKX6306 Torque CurvesDocument11 pagesLEKX6306 Torque Curvesmijael1393100% (1)
- Phase Test 3 Result Ity XiDocument4 pagesPhase Test 3 Result Ity Xijanob63114Pas encore d'évaluation
- United State Pharmacopoea 1st EditionDocument294 pagesUnited State Pharmacopoea 1st EditionNehruRogerPas encore d'évaluation
- Lesson 1 Measuring DistanceDocument20 pagesLesson 1 Measuring DistanceKarl EliezerPas encore d'évaluation
- Thin Walled Pressure Vessels: ASEN 3112 - StructuresDocument11 pagesThin Walled Pressure Vessels: ASEN 3112 - Structuresaap1Pas encore d'évaluation
- Sample Design of TroughDocument18 pagesSample Design of TroughAsela UdayangaPas encore d'évaluation
- Chapter 1. Introduction: 1. Generation of X-RayDocument127 pagesChapter 1. Introduction: 1. Generation of X-Raynirmal_phyPas encore d'évaluation
- Levelling InstrumentsDocument5 pagesLevelling Instrumentsartjill printingPas encore d'évaluation
- Three Branches of Fluid MechanicsDocument47 pagesThree Branches of Fluid MechanicsJemuel FloresPas encore d'évaluation
- 1.7 Periodic Trends in Atomic PropertiesDocument5 pages1.7 Periodic Trends in Atomic PropertiesSilver AbdulahiPas encore d'évaluation
- Prof. RUCHI DASDocument4 pagesProf. RUCHI DASGrace HoagnPas encore d'évaluation
- Project and Construction of Underground Stations and Tunnels (TBM and NATM) in Heterogeneous Masses For Metro Do PortoDocument46 pagesProject and Construction of Underground Stations and Tunnels (TBM and NATM) in Heterogeneous Masses For Metro Do PortoSiva RajPas encore d'évaluation
- Manual Daikin VRVDocument20 pagesManual Daikin VRVErnesto BonillaPas encore d'évaluation
- Waves Brain MapDocument1 pageWaves Brain MapBala MuruganPas encore d'évaluation
- JgyugufDocument47 pagesJgyugufMarcoPas encore d'évaluation
- Microfiltration (MF), Ultrafiltration (UF)Document52 pagesMicrofiltration (MF), Ultrafiltration (UF)WONG TS80% (5)
- 9ABS301 Mathematics - IIDocument8 pages9ABS301 Mathematics - IIsivabharathamurthyPas encore d'évaluation