Vous aimerez peut-être aussi
- 021.kinematics Inverse Kinematics ManipulationDocument107 pages021.kinematics Inverse Kinematics ManipulationGanesh MandpePas encore d'évaluation
- Middle East Technical University Department of Mechanical Engineering ME 310 Theory of Machines I - Planar MechanismsDocument27 pagesMiddle East Technical University Department of Mechanical Engineering ME 310 Theory of Machines I - Planar MechanismsMahmut KILIÇPas encore d'évaluation
- Kutzbach CriterionDocument7 pagesKutzbach CriterionTasnuva SharminPas encore d'évaluation
- Introduction to Robot Kinematics and ManipulationDocument107 pagesIntroduction to Robot Kinematics and ManipulationBrittaney Bato100% (1)
- Robotics 7Document17 pagesRobotics 7nadiaPas encore d'évaluation
- Lect. 3 - ActuationDocument15 pagesLect. 3 - ActuationDavid EkongPas encore d'évaluation
- MFA Mech Vib Sess 1 UpdatedDocument10 pagesMFA Mech Vib Sess 1 Updatedselenophile2719Pas encore d'évaluation
- Chapter 02 - Mechanism and Linkages - Part ADocument81 pagesChapter 02 - Mechanism and Linkages - Part ASyahrul Nizam AnuarPas encore d'évaluation
- EE-381 Robotics-1 Lecture Notes on Robotic ManipulatorsDocument34 pagesEE-381 Robotics-1 Lecture Notes on Robotic ManipulatorsWolf DragonnePas encore d'évaluation
- Chapter 4 Control Structures - RepetitionDocument27 pagesChapter 4 Control Structures - RepetitionElan JohnsonPas encore d'évaluation
- Paper With Cover and TOCDocument49 pagesPaper With Cover and TOCشتشوتPas encore d'évaluation
- CFX-FSI 120 Lect-05 6DOFDocument21 pagesCFX-FSI 120 Lect-05 6DOFĐạiChômChômPas encore d'évaluation
- Mechanism & DOFDocument33 pagesMechanism & DOFMostafa MahmoodPas encore d'évaluation
- CFX Fsi 6dofDocument26 pagesCFX Fsi 6dofCFDiran.irPas encore d'évaluation
- SimXpert R3.2 Motion Workspace GuideDocument262 pagesSimXpert R3.2 Motion Workspace GuidepaulkastlePas encore d'évaluation
- Cume213 L2Document80 pagesCume213 L2irvinvongiPas encore d'évaluation
- Degree of FreedomDocument26 pagesDegree of Freedomumair rasheedPas encore d'évaluation
- EE-381 Robotics KinematicsDocument34 pagesEE-381 Robotics KinematicsMuhammad Usama Bin TahirPas encore d'évaluation
- Loops in JavaDocument41 pagesLoops in JavaSANIDHYSINGH RAGHUWANSHIPas encore d'évaluation
- classVIII Coding Teacher PresentationDocument44 pagesclassVIII Coding Teacher PresentationP SrinivasPas encore d'évaluation
- RoboticsDocument60 pagesRoboticsKasun AnjanaPas encore d'évaluation
- Motion View Tutorial: Four Bar Mechanism: by Prakash PagadalaDocument7 pagesMotion View Tutorial: Four Bar Mechanism: by Prakash PagadalaRajesh NitharwalPas encore d'évaluation
- 5.robo Unit IIIDocument56 pages5.robo Unit IIIIndranil BhattacharyyaPas encore d'évaluation
- TM Lecture 1 PDFDocument12 pagesTM Lecture 1 PDFMohammed QuthahPas encore d'évaluation
- Chapter 2 - Complete PDFDocument62 pagesChapter 2 - Complete PDFNauman RiazPas encore d'évaluation
- Analytical Kinematics Models and Special Geometries of A Class of 4-DOF Parallel MechanismsDocument10 pagesAnalytical Kinematics Models and Special Geometries of A Class of 4-DOF Parallel Mechanismsvinoo13Pas encore d'évaluation
- ME 309 Mechanics of MachinesDocument56 pagesME 309 Mechanics of MachinesEMADPas encore d'évaluation
- Elements of Mechanical Design - Mechanisms (2D Kinematic Analysis)Document27 pagesElements of Mechanical Design - Mechanisms (2D Kinematic Analysis)jotageaPas encore d'évaluation
- Second RobotDocument5 pagesSecond RobotNasim MammadovPas encore d'évaluation
- Lecture 4 - Control Structures II (Repetition)Document28 pagesLecture 4 - Control Structures II (Repetition)abdi565453Pas encore d'évaluation
- The Slope Deflection EquationDocument9 pagesThe Slope Deflection EquationrchiePas encore d'évaluation
- Lecture 9 MechanismDocument44 pagesLecture 9 Mechanismaku_la100% (8)
- RoboticsDocument10 pagesRoboticsNaga Vamsi KrishnaPas encore d'évaluation
- Working and Assembly Modes of The Agile Eye: Ilian - Bonev@etsmtl - CaDocument12 pagesWorking and Assembly Modes of The Agile Eye: Ilian - Bonev@etsmtl - CaJavier Andres EcheverriaPas encore d'évaluation
- Theory of Machines (ME313) : L1 IntroductionDocument82 pagesTheory of Machines (ME313) : L1 IntroductionMuneer AhmedPas encore d'évaluation
- PhysicsDocument162 pagesPhysicsRajat AnandPas encore d'évaluation
- CH 2Document85 pagesCH 2usamakhanPas encore d'évaluation
- Chapter 4 Lecture Notes (Joints & End-Effector) - 02 JunDocument57 pagesChapter 4 Lecture Notes (Joints & End-Effector) - 02 Junakash kahsyapPas encore d'évaluation
- MultiBodyDynamics Using ADAMSDocument8 pagesMultiBodyDynamics Using ADAMSHemanth KrishnaPas encore d'évaluation
- Denavit Hartenberg KinematicsDocument32 pagesDenavit Hartenberg KinematicshasdaPas encore d'évaluation
- ch2 PDFDocument10 pagesch2 PDFMuhammad AliPas encore d'évaluation
- L2-2 OdesDocument16 pagesL2-2 OdesDaniel LoboPas encore d'évaluation
- Dynamics of LinkagesDocument78 pagesDynamics of LinkageslataPas encore d'évaluation
- IOMAC'19: Basic Concepts of Modal ScalingDocument8 pagesIOMAC'19: Basic Concepts of Modal ScalingSAGI RATHNA PRASAD me14d210Pas encore d'évaluation
- Student Workbook: Quanser Robotics Package For Education For MATLAB /simulink UsersDocument33 pagesStudent Workbook: Quanser Robotics Package For Education For MATLAB /simulink UsersPruebaPas encore d'évaluation
- Kinematics of Machines ExplainedDocument86 pagesKinematics of Machines Explainedmuthucoumaren1429100% (1)
- Mechanics of Machine - Lecture 2Document15 pagesMechanics of Machine - Lecture 2Adil KhawajaPas encore d'évaluation
- Swarm Intelligent w6Document76 pagesSwarm Intelligent w6Khoa NguyenPas encore d'évaluation
- 05 IterationDocument46 pages05 IterationZHEN-HONG LEEPas encore d'évaluation
- Dependencies, Instruction Scheduling, Optimization, and ParallelismDocument49 pagesDependencies, Instruction Scheduling, Optimization, and ParallelismDUDEKULA VIDYASAGARPas encore d'évaluation
- Industrial RobotDocument32 pagesIndustrial RobotelkhawadPas encore d'évaluation
- Planning Agent Goal Sequences in 40 CharactersDocument21 pagesPlanning Agent Goal Sequences in 40 CharactersABCDEFG HOJKLMNOPPas encore d'évaluation
- Chapter 5 Part 2Document21 pagesChapter 5 Part 2ogata kiniPas encore d'évaluation
- Me'Scopeves Application Note #5: Impact Testing QuestionDocument7 pagesMe'Scopeves Application Note #5: Impact Testing Question植村拓朗Pas encore d'évaluation
- 04 Forward KinematicsDocument35 pages04 Forward Kinematicspham tamPas encore d'évaluation
- Module 8Document24 pagesModule 8augustus1189Pas encore d'évaluation
- Chapter 7 - Part 2Document28 pagesChapter 7 - Part 2Vinot EsanPas encore d'évaluation
- Robot Manipulators: Modeling, Performance Analysis and ControlD'EverandRobot Manipulators: Modeling, Performance Analysis and ControlPas encore d'évaluation
- Mountain Darryl R.. Disrupting Conventional Law0AFirm Business Models Using0ADocument AssemblyDocument22 pagesMountain Darryl R.. Disrupting Conventional Law0AFirm Business Models Using0ADocument AssemblyRodrigo BobPas encore d'évaluation
- Basic ConceptsDocument5 pagesBasic ConceptsRodrigo BobPas encore d'évaluation
- iRacing Race Schedule with OVAL and ROAD SeriesDocument117 pagesiRacing Race Schedule with OVAL and ROAD SeriesRodrigo BobPas encore d'évaluation
- Assignment 1Document5 pagesAssignment 1Rodrigo BobPas encore d'évaluation
- Manual Powerbank PB-6KDocument2 pagesManual Powerbank PB-6KRodrigo BobPas encore d'évaluation
- UCEM Accumulator Final ReportDocument40 pagesUCEM Accumulator Final ReportRodrigo BobPas encore d'évaluation
- Aerodynamics of Gurney Flaps On A Single-Element High-Lift Wing PDFDocument7 pagesAerodynamics of Gurney Flaps On A Single-Element High-Lift Wing PDFRodrigo Bob100% (1)
- University of Southampton Undergraduate Prospectus 2016 PDFDocument99 pagesUniversity of Southampton Undergraduate Prospectus 2016 PDFRodrigo BobPas encore d'évaluation
- A Tool For Lap Time SimulationDocument5 pagesA Tool For Lap Time SimulationRodrigo BobPas encore d'évaluation
- CL Vs AlphaDocument22 pagesCL Vs Alpharahultri333Pas encore d'évaluation
- Advanced Dynamics - TU Delft OnlineDocument1 pageAdvanced Dynamics - TU Delft OnlineRodrigo BobPas encore d'évaluation
- Data Acquisition System For A Formula SAE Race CarDocument43 pagesData Acquisition System For A Formula SAE Race CarRodrigo Bob100% (1)
- A Tool For Lap Time Simulation PDFDocument5 pagesA Tool For Lap Time Simulation PDFRodrigo BobPas encore d'évaluation
- Developments of A Method For Lap Time SimulationDocument7 pagesDevelopments of A Method For Lap Time SimulationRodrigo Bob100% (1)
- Eita GiovannaDocument40 pagesEita GiovannaRodrigo Bob100% (1)
- Projeto de Pontes de Macarrão PDFDocument8 pagesProjeto de Pontes de Macarrão PDFRodrigo BobPas encore d'évaluation
- Racing Simulation of A Formula 1 Vehicle With Kinetic Energy Recovery SystemDocument15 pagesRacing Simulation of A Formula 1 Vehicle With Kinetic Energy Recovery SystemRodrigo Bob100% (1)
- Stress Analysis of Piping SystemsDocument108 pagesStress Analysis of Piping SystemsShijumon KpPas encore d'évaluation
- Vibration Based Monitoring Applied To The Identification of DefectsDocument10 pagesVibration Based Monitoring Applied To The Identification of DefectsRodrigo BobPas encore d'évaluation
- USER MANUAL CHASSIS SETUP GUIDEREARmmdegdegdegLb/inmmmmnotchesmm25-2.5°20’ IN13000 turn11B8 R10B10 R6STD<<<<>>>>2Document61 pagesUSER MANUAL CHASSIS SETUP GUIDEREARmmdegdegdegLb/inmmmmnotchesmm25-2.5°20’ IN13000 turn11B8 R10B10 R6STD<<<<>>>>2Rodrigo Bob100% (2)
- Politecnica - Di - Torino - Specific Qualification PDFDocument3 pagesPolitecnica - Di - Torino - Specific Qualification PDFRodrigo BobPas encore d'évaluation
- Response Surface Methodology (RSM) and Design of Experiments (Doe) Applied To Racecar Vehicle Dynamics Simulation and DevelopmentDocument20 pagesResponse Surface Methodology (RSM) and Design of Experiments (Doe) Applied To Racecar Vehicle Dynamics Simulation and DevelopmentRodrigo BobPas encore d'évaluation
- Vehicle DynamicsDocument24 pagesVehicle Dynamicssviggnesh_hpPas encore d'évaluation
- NAS120 WS14 Parasolid ModelingDocument34 pagesNAS120 WS14 Parasolid ModelingPieter Van AschPas encore d'évaluation
- Patran 2010 Reference Manual Part 1: Basic FunctionsDocument798 pagesPatran 2010 Reference Manual Part 1: Basic FunctionsDon100% (1)
- Application of Computers To Automobile AerodynamicsDocument10 pagesApplication of Computers To Automobile AerodynamicsRodrigo BobPas encore d'évaluation
- Using Modelica Models For Driver-In-The-loop SimulatorsDocument8 pagesUsing Modelica Models For Driver-In-The-loop SimulatorsRodrigo BobPas encore d'évaluation
- CLP 3 MC ProblemsDocument521 pagesCLP 3 MC ProblemsclaudiaPas encore d'évaluation
- Electromagnetic RadiationDocument22 pagesElectromagnetic RadiationpriyaPas encore d'évaluation
- Detection of Neutrons: Part I: Ralf NolteDocument63 pagesDetection of Neutrons: Part I: Ralf Nolteusama tariqPas encore d'évaluation
- Questions & Answers On Efficiency and TestingDocument22 pagesQuestions & Answers On Efficiency and Testingkibrom atsbha100% (1)
- End EffectersDocument4 pagesEnd EffectersSindhu BhaskarPas encore d'évaluation
- PHYS 122 (Electrostatics)Document14 pagesPHYS 122 (Electrostatics)Yusuf ZaynabPas encore d'évaluation
- Chapter 11 Thermal MeasurementsDocument22 pagesChapter 11 Thermal MeasurementsGiovanni SlackPas encore d'évaluation
- Review Critical PlaneDocument38 pagesReview Critical PlaneJay SrivastavaPas encore d'évaluation
- Structural steel design module on welded connectionsDocument9 pagesStructural steel design module on welded connectionsdash1991Pas encore d'évaluation
- Binding EnergyDocument12 pagesBinding Energyanne dominique quintanaPas encore d'évaluation
- 00092929Document14 pages00092929Sunandan KumarPas encore d'évaluation
- Physics Answers From Book EsqsDocument82 pagesPhysics Answers From Book EsqsDewjan KadupitiyaPas encore d'évaluation
- Adaptive Control Theory: Model Reference Adaptive SystemsDocument16 pagesAdaptive Control Theory: Model Reference Adaptive SystemsThanh NguyenPas encore d'évaluation
- 30 IChO PP SolDocument113 pages30 IChO PP SolWahyuda Nuzul FahmiPas encore d'évaluation
- Lab Report 3 Calorimetry IntroductionDocument3 pagesLab Report 3 Calorimetry IntroductionJullifer TubaPas encore d'évaluation
- Cs ProjectDocument32 pagesCs ProjectAditya TenguriaPas encore d'évaluation
- How Good in Math Was Paul DiracDocument2 pagesHow Good in Math Was Paul DiracAnonymous j6r5KRtrH2Pas encore d'évaluation
- HS PS1 1Document2 pagesHS PS1 1Mokona NguyễnPas encore d'évaluation
- ESS101-Modeling and Simulation: Paolo FalconeDocument28 pagesESS101-Modeling and Simulation: Paolo FalconeElvir PecoPas encore d'évaluation
- ESD Design PDFDocument39 pagesESD Design PDFarammart100% (2)
- Table of Specification: Obrero Elementary School First Grading Summative Test No. 1Document10 pagesTable of Specification: Obrero Elementary School First Grading Summative Test No. 1aldwinamistaPas encore d'évaluation
- Manonmaniam Sundaranar University: M.Sc. Physics - I YearDocument130 pagesManonmaniam Sundaranar University: M.Sc. Physics - I YearDr. Pratap Kumar SwainPas encore d'évaluation
- Module 2: Electrostatics Lecture 10: Poisson Equations: ObjectivesDocument9 pagesModule 2: Electrostatics Lecture 10: Poisson Equations: ObjectivesEviVardakiPas encore d'évaluation
- MCQ On SurveyingDocument11 pagesMCQ On SurveyingShashikant Gaur71% (7)
- Nuclear Reactors (7.3.3) - Edexcel IGCSE Physics Revision Notes 2019 - Save My Exams PDFDocument4 pagesNuclear Reactors (7.3.3) - Edexcel IGCSE Physics Revision Notes 2019 - Save My Exams PDFAli LakhwairaPas encore d'évaluation
- MAT 217 Lecture 4 PDFDocument3 pagesMAT 217 Lecture 4 PDFCarlo KaramPas encore d'évaluation
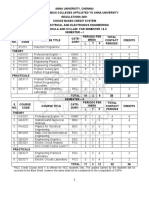
- Anna University Affiliated Colleges RegulationsDocument32 pagesAnna University Affiliated Colleges RegulationsKRAJ315Pas encore d'évaluation
- Surveying Lesson 6 To 10 PDFDocument68 pagesSurveying Lesson 6 To 10 PDFNadane AldoverPas encore d'évaluation
- Functional Analysis Lecture NotesDocument52 pagesFunctional Analysis Lecture NotesTianyu TaoPas encore d'évaluation