Vous aimerez peut-être aussi
- Pruebas A Cables de PotenciaDocument8 pagesPruebas A Cables de Potenciaalex409091010Pas encore d'évaluation
- Instalacion de Cables de Media TensionDocument68 pagesInstalacion de Cables de Media TensionVictor C. CcariPas encore d'évaluation
- Integracion Por Sustitución TrigonometricaDocument20 pagesIntegracion Por Sustitución TrigonometricaANALY DEL CARMEN MELENDRES BERMEO100% (1)
- Maquina Whimshurst Carga DistribuciónDocument4 pagesMaquina Whimshurst Carga DistribuciónMarcus FigueroaPas encore d'évaluation
- Practica No. 1unoDocument6 pagesPractica No. 1unoMarcus FigueroaPas encore d'évaluation
- Resumen Capitulo XIII-XIVDocument3 pagesResumen Capitulo XIII-XIVMarcus FigueroaPas encore d'évaluation
- Resumen Capitulo XIII-XIVDocument3 pagesResumen Capitulo XIII-XIVMarcus FigueroaPas encore d'évaluation
- Resumen Capitulo XV-XVIIDocument4 pagesResumen Capitulo XV-XVIIMarcus FigueroaPas encore d'évaluation
- Etica Ensayo 1Document4 pagesEtica Ensayo 1Marcus FigueroaPas encore d'évaluation
- Resumen Capitulo XV-XVIIDocument4 pagesResumen Capitulo XV-XVIIMarcus FigueroaPas encore d'évaluation
- Resumen Capitulo XXI-XXVDocument3 pagesResumen Capitulo XXI-XXVMarcus FigueroaPas encore d'évaluation
- Portada Creativa FlashDocument1 pagePortada Creativa FlashMarcus FigueroaPas encore d'évaluation
- Resumen Capitulo XVIII-XXDocument4 pagesResumen Capitulo XVIII-XXMarcus FigueroaPas encore d'évaluation
- Ensayo 1Document4 pagesEnsayo 1Marcus FigueroaPas encore d'évaluation
- Etica Ensayo 2Document3 pagesEtica Ensayo 2Marcus FigueroaPas encore d'évaluation
- TAREA#1Document3 pagesTAREA#1Marcus Figueroa100% (1)
- Etica Ensayo 2Document3 pagesEtica Ensayo 2Marcus FigueroaPas encore d'évaluation
- A10 PDFDocument10 pagesA10 PDFJapPerPas encore d'évaluation
- Glosario: Página 190Document4 pagesGlosario: Página 190Fernando Gamboa GonzálesPas encore d'évaluation
- Bibliografía: LibrosDocument3 pagesBibliografía: LibrosMarcus FigueroaPas encore d'évaluation
- Criterios para La Selección de Conductores de Media TensiónDocument14 pagesCriterios para La Selección de Conductores de Media Tensiónnetrakid0% (1)
- Guía para instalación segura de cables eléctricos MTDocument2 pagesGuía para instalación segura de cables eléctricos MTMarcus FigueroaPas encore d'évaluation
- Cables de Media Tension - Parametros ElectricosDocument22 pagesCables de Media Tension - Parametros ElectricosJUAN PABLOPas encore d'évaluation
- Cuatro regiones en riesgo extremo y otras cuatro rozan el límite por COVIDDocument4 pagesCuatro regiones en riesgo extremo y otras cuatro rozan el límite por COVIDMarcus FigueroaPas encore d'évaluation
- A5Document16 pagesA5mapasabcPas encore d'évaluation
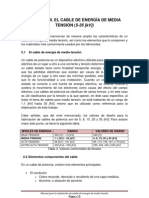
- Manual para La Instalación de Cables de Energía de Media Tensión Índice Introducción Capítulo I. AntecedentesDocument6 pagesManual para La Instalación de Cables de Energía de Media Tensión Índice Introducción Capítulo I. AntecedentesMarcus FigueroaPas encore d'évaluation
- Modelado y Simulación de Autos Eléctricos Con MotoresDocument6 pagesModelado y Simulación de Autos Eléctricos Con MotoresMarcus FigueroaPas encore d'évaluation
- Media Tension Cap 1Document8 pagesMedia Tension Cap 1marioz25Pas encore d'évaluation
- A1 PDFDocument6 pagesA1 PDFLuis GarciaPas encore d'évaluation
- TAREA#4Document4 pagesTAREA#4Marcus FigueroaPas encore d'évaluation
- TAREA#1Document3 pagesTAREA#1Marcus Figueroa100% (1)
- Problema de MuñozDocument44 pagesProblema de MuñozZteven GonzalezPas encore d'évaluation
- Apuntes de Variable ComplejaDocument11 pagesApuntes de Variable ComplejaCristina VazquezPas encore d'évaluation
- Puentes IntegralesDocument21 pagesPuentes IntegralesJorge Hernan BTPas encore d'évaluation
- Longitud de Una Curva PlanaDocument41 pagesLongitud de Una Curva Planamartin hamiltonPas encore d'évaluation
- SIlabo Matematica Negocios UPN ChessDocument9 pagesSIlabo Matematica Negocios UPN ChessFERRELINPas encore d'évaluation
- Cálculo del centroide y volumen de una botella plásticaDocument3 pagesCálculo del centroide y volumen de una botella plásticaFernando FigueroaPas encore d'évaluation
- GRUPO 10 - Distribución Normal y ExponencialDocument16 pagesGRUPO 10 - Distribución Normal y ExponencialAndrés PaidaPas encore d'évaluation
- Prerrequisitos Aeronautica UPBDocument3 pagesPrerrequisitos Aeronautica UPBGoodLockPas encore d'évaluation
- Guía para La Concepción de Puentes Integrales en CarreterasDocument103 pagesGuía para La Concepción de Puentes Integrales en CarreterasJorge SuárezPas encore d'évaluation
- Plan de InvestigaciónDocument26 pagesPlan de InvestigaciónJamil Cristian Chalco QuentaPas encore d'évaluation
- Evaluacion Final - Escenario 8: Historial de IntentosDocument7 pagesEvaluacion Final - Escenario 8: Historial de IntentosLeonardo EcheverriPas encore d'évaluation
- Planteamiento Del Problema (Area Bajo La Curva)Document4 pagesPlanteamiento Del Problema (Area Bajo La Curva)Jennifer GuerreroPas encore d'évaluation
- Mecanica de Fluidos EjerciciosDocument414 pagesMecanica de Fluidos Ejerciciosalex100% (1)
- Seminario 8 MAIADocument4 pagesSeminario 8 MAIAAmy Lisset Alvarez -Pas encore d'évaluation
- Notas E. D.Document155 pagesNotas E. D.Daniel Esteban Ruales ZambranoPas encore d'évaluation
- Guia 8 Derivacion e Integracion NumericaDocument10 pagesGuia 8 Derivacion e Integracion NumericaCheko KillesPas encore d'évaluation
- Diseño de Los Canales de Distribuciòn PDFDocument15 pagesDiseño de Los Canales de Distribuciòn PDFAndrés Abraham Soto RamosPas encore d'évaluation
- Capitulo 07 Respuesta EspectralDocument30 pagesCapitulo 07 Respuesta EspectralDonny Huerta RojasPas encore d'évaluation
- Examen Final - Semana 8Document5 pagesExamen Final - Semana 8famitolo100% (2)
- Tarea Semana 6Document1 pageTarea Semana 6lmzavaletagoPas encore d'évaluation
- Tarea 03Document2 pagesTarea 03David ZapataPas encore d'évaluation
- 02 - GFPI-F-019 Guia de Aprendizaje - ELECTRICIDAD BASICADocument11 pages02 - GFPI-F-019 Guia de Aprendizaje - ELECTRICIDAD BASICAJOSE CARVAJALPas encore d'évaluation
- S06 PPT Calculo2 Volumenes Disco ArandelasDocument16 pagesS06 PPT Calculo2 Volumenes Disco ArandelasCesar Lescano rodriguezPas encore d'évaluation
- Eedi U1 Ea XxyzDocument10 pagesEedi U1 Ea Xxyzperla15Pas encore d'évaluation
- Cálculo vectorial: campos, integrales y teoremasDocument68 pagesCálculo vectorial: campos, integrales y teoremasJeanmarco Felipe Manrique PurizacaPas encore d'évaluation
- Copia de Curso Taller Habilitaciones Urbanas HuancayoDocument112 pagesCopia de Curso Taller Habilitaciones Urbanas HuancayoDiana Cerron Quispe100% (4)
- Historia y Aplicaciones de La Derivada en Las Ciencias Económicas - Consideraciones DidácticasDocument36 pagesHistoria y Aplicaciones de La Derivada en Las Ciencias Económicas - Consideraciones DidácticasPedro PabloPas encore d'évaluation
- Átomos y MoléculasDocument16 pagesÁtomos y MoléculasFabián CruzPas encore d'évaluation
- Trabajo de Estadistica (Calculos)Document20 pagesTrabajo de Estadistica (Calculos)Albi CarrilloPas encore d'évaluation