Vous aimerez peut-être aussi
- S16 PLLDocument44 pagesS16 PLLPakde ZoelfaPas encore d'évaluation
- PDF Abstrak Id Abstrak-20249278Document1 pagePDF Abstrak Id Abstrak-20249278Pakde ZoelfaPas encore d'évaluation
- Rechargeable Batteries and Battery Management Systems DesignDocument2 pagesRechargeable Batteries and Battery Management Systems DesignPakde ZoelfaPas encore d'évaluation
- LicenseDocument1 pageLicensePakde ZoelfaPas encore d'évaluation
- Pekanbaru Case StudyDocument4 pagesPekanbaru Case StudyPakde ZoelfaPas encore d'évaluation
- J Me STN 42350156Document5 pagesJ Me STN 42350156Pakde ZoelfaPas encore d'évaluation
- Energies: Energy-Regenerative Braking Control of Electric Vehicles Using Three-Phase Brushless Direct-Current MotorsDocument16 pagesEnergies: Energy-Regenerative Braking Control of Electric Vehicles Using Three-Phase Brushless Direct-Current MotorsAnonymous KhhapQJVYtPas encore d'évaluation
- Faucl1nin7oqvjq PDFDocument23 pagesFaucl1nin7oqvjq PDFPakde ZoelfaPas encore d'évaluation
- Weva4-4052 2Document12 pagesWeva4-4052 2Pakde ZoelfaPas encore d'évaluation
- Arduino - ATmega328 - PWM Signal.cDocument3 pagesArduino - ATmega328 - PWM Signal.cvackyvipin100% (1)
- Serial Komunicaion 16Document2 pagesSerial Komunicaion 16Pakde ZoelfaPas encore d'évaluation
- Atmega 128 AsliDocument4 pagesAtmega 128 AsliPakde ZoelfaPas encore d'évaluation
- 3 Phase InverterDocument8 pages3 Phase InverterMcAfee UrchePas encore d'évaluation
- Phase Locked Loop System For FACTS: Dragan Jovcic, Member, IEEEDocument8 pagesPhase Locked Loop System For FACTS: Dragan Jovcic, Member, IEEEPakde ZoelfaPas encore d'évaluation
- Lithium-Ion Battery: SpecificationDocument14 pagesLithium-Ion Battery: SpecificationPakde ZoelfaPas encore d'évaluation
- 2011 Juda Advanced BatteriesDocument7 pages2011 Juda Advanced BatteriesPakde ZoelfaPas encore d'évaluation
- Project Origin The ClientDocument12 pagesProject Origin The ClientPakde ZoelfaPas encore d'évaluation
- Rechargeable Batteries and Battery Management Systems DesignDocument2 pagesRechargeable Batteries and Battery Management Systems DesignPakde ZoelfaPas encore d'évaluation
- Voltage Regulation in A Microgid With Hybrid PV/Wind Energy: TELKOMNIKA Indonesian Journal of Electrical EngineeringDocument8 pagesVoltage Regulation in A Microgid With Hybrid PV/Wind Energy: TELKOMNIKA Indonesian Journal of Electrical EngineeringPakde ZoelfaPas encore d'évaluation
- Sanitary Landfill Siting and Design GuidanceDocument6 pagesSanitary Landfill Siting and Design GuidancehghgfhfgtetetertettteetePas encore d'évaluation
- Capacitance and ESR Temperature Characteristics GraphDocument1 pageCapacitance and ESR Temperature Characteristics GraphPakde ZoelfaPas encore d'évaluation
- DC Generator Characteristics Lab ManualDocument5 pagesDC Generator Characteristics Lab ManualVivek RoyPas encore d'évaluation
- Magic Sine WavesDocument6 pagesMagic Sine WavesAditya HartantoPas encore d'évaluation
- Hit Hs645mgDocument1 pageHit Hs645mgYudi Iduy WahyudiPas encore d'évaluation
- DS Diodo CatalogoDocument4 pagesDS Diodo CatalogoNando Junta PhdPas encore d'évaluation
- Economic Feasibility of Biogas Plant for Small TownDocument2 pagesEconomic Feasibility of Biogas Plant for Small TownPakde ZoelfaPas encore d'évaluation
- Power-Management Strategies For A Grid-Connected PV-FC Hybrid SystemDocument1 pagePower-Management Strategies For A Grid-Connected PV-FC Hybrid SystemPakde ZoelfaPas encore d'évaluation
- 2011 Juda Advanced BatteriesDocument7 pages2011 Juda Advanced BatteriesPakde ZoelfaPas encore d'évaluation
- BatteryDocument12 pagesBatteryRobert SavulescuPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- bc337 338Document2 pagesbc337 338Jose M PeresPas encore d'évaluation
- 140 HDocument7 pages140 HAlex CastilloPas encore d'évaluation
- High Speed SignalDocument1 pageHigh Speed SignalRohit KumarPas encore d'évaluation
- QR Flyback ConverterDocument27 pagesQR Flyback ConverterAndrea SanninoPas encore d'évaluation
- Electrical SORDocument70 pagesElectrical SORsanjaysonerPas encore d'évaluation
- Trident FUSED OIL RMU up to 15.5kVDocument4 pagesTrident FUSED OIL RMU up to 15.5kVmealysrPas encore d'évaluation
- ♤ Spare Part List (베트남) : No. Item Item (1) Item Code Model Name SpecDocument108 pages♤ Spare Part List (베트남) : No. Item Item (1) Item Code Model Name SpecXuân DuyPas encore d'évaluation
- List of Components: Components Working or FunctionDocument6 pagesList of Components: Components Working or FunctionDiyha ChoudhuryPas encore d'évaluation
- Introduction To Logic Gates and Circuit Design: Hernandez, John Patrick A. EE-3104 Intended Learning OutcomesDocument17 pagesIntroduction To Logic Gates and Circuit Design: Hernandez, John Patrick A. EE-3104 Intended Learning OutcomesJohn Patrick HernandezPas encore d'évaluation
- Mush Winding2Document18 pagesMush Winding2amanuel girmaPas encore d'évaluation
- PD InterviewDocument5 pagesPD Interviewjayanthi_kondaPas encore d'évaluation
- Actuador Honeywell 103 PDFDocument2 pagesActuador Honeywell 103 PDFManuel AlcudiaPas encore d'évaluation
- FC4 - : Name Data Type Address CommentDocument7 pagesFC4 - : Name Data Type Address Commentpk cfctkPas encore d'évaluation
- HPS2D Operation ManualDocument33 pagesHPS2D Operation Manualsanjeewa12Pas encore d'évaluation
- Thermal Overload Relays GuideDocument20 pagesThermal Overload Relays Guidejorge garciaPas encore d'évaluation
- EU-001 Engineering Utilities ReportDocument2 pagesEU-001 Engineering Utilities ReportCOOLOTS kiPas encore d'évaluation
- Masterpact MTZ - Acb - lv833685spDocument2 pagesMasterpact MTZ - Acb - lv833685spGoran MladenovicPas encore d'évaluation
- 1KW Project in On GrideDocument5 pages1KW Project in On GrideRAKESH PRADHANPas encore d'évaluation
- Releasing Control Panel: FeaturesDocument2 pagesReleasing Control Panel: FeaturesTanveer AzizPas encore d'évaluation
- Electronic switchgear and accessories BEG rectifiers setting the standardDocument48 pagesElectronic switchgear and accessories BEG rectifiers setting the standardGENTA NUSA ATLANTISPas encore d'évaluation
- And Gate Based ProjectsDocument5 pagesAnd Gate Based ProjectsKade BenPas encore d'évaluation
- Load-Break Switch With Vacuum Interrupter VI in Auxiliary-Path SiemensDocument5 pagesLoad-Break Switch With Vacuum Interrupter VI in Auxiliary-Path SiemensAbdul MoizPas encore d'évaluation
- 4.2 Low Voltage Directive AssessmentDocument11 pages4.2 Low Voltage Directive AssessmentmpendletonPas encore d'évaluation
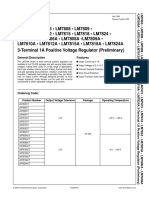
- LM2930 3-Terminal Positive Regulator: General Description FeaturesDocument8 pagesLM2930 3-Terminal Positive Regulator: General Description FeaturesAnkitPas encore d'évaluation
- Chapter 6: Digital Components: ObjectivesDocument17 pagesChapter 6: Digital Components: ObjectivesSteffany RoquePas encore d'évaluation
- MERLIN GERIN LVCircuitBreakers11to3200A PDFDocument169 pagesMERLIN GERIN LVCircuitBreakers11to3200A PDFvj100% (2)
- Special-Purpose Diodes: Zener, Varactor and Optical DiodesDocument45 pagesSpecial-Purpose Diodes: Zener, Varactor and Optical DiodesAbdullahPas encore d'évaluation
- Datasheet F12C20CDocument2 pagesDatasheet F12C20Cfabian orozPas encore d'évaluation
- Advances in Vector Control Ofac Motor Drives A Review PDFDocument24 pagesAdvances in Vector Control Ofac Motor Drives A Review PDFBook4AllPas encore d'évaluation
- 50 Watt Mono Amplifier TDA1514A Technical MrigankaDocument2 pages50 Watt Mono Amplifier TDA1514A Technical MrigankaNataly DavalosPas encore d'évaluation