Vous aimerez peut-être aussi
- Fundamentos de Programacion Piensa en C - Osvaldo Cairó BattistuttiDocument394 pagesFundamentos de Programacion Piensa en C - Osvaldo Cairó BattistuttiKuroNeko Canuto100% (7)
- Lab 04 - Sistemas Secuenciales AutomáticosDocument15 pagesLab 04 - Sistemas Secuenciales AutomáticosJhordam Maxwell Gómez Torres100% (1)
- Taller N°1Document4 pagesTaller N°1Aileen AllenPas encore d'évaluation
- Formulario 2 Solicitud de Beca 21Document1 pageFormulario 2 Solicitud de Beca 21Ka VargasPas encore d'évaluation
- FODA de Uribe&SchwarzkopfDocument1 pageFODA de Uribe&SchwarzkopfKa VargasPas encore d'évaluation
- TICS Sector SaludDocument80 pagesTICS Sector SaludNayuth Luissela CassiopeiaPas encore d'évaluation
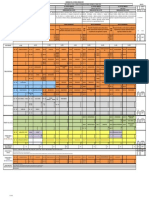
- mallaCurricularSistemas 0Document1 pagemallaCurricularSistemas 0Esteban MonteroPas encore d'évaluation
- Ingenieria RequisitosDocument220 pagesIngenieria RequisitosKa VargasPas encore d'évaluation
- Formulario 2 Solicitud de Beca 21Document1 pageFormulario 2 Solicitud de Beca 21Ka VargasPas encore d'évaluation
- Terminal Terrestre Quitumbe - Destinos y FrecuenciasDocument30 pagesTerminal Terrestre Quitumbe - Destinos y FrecuenciasivimayaPas encore d'évaluation
- Funcionesrecursivas 160613150854Document31 pagesFuncionesrecursivas 160613150854Ka VargasPas encore d'évaluation
- PunterosDocument55 pagesPunterosKa VargasPas encore d'évaluation
- Terminal Terrestre Quitumbe - Destinos y FrecuenciasDocument30 pagesTerminal Terrestre Quitumbe - Destinos y FrecuenciasivimayaPas encore d'évaluation
- SimulacionDocument1 pageSimulacionKa VargasPas encore d'évaluation
- Matilde Hidalgo NavarroDocument4 pagesMatilde Hidalgo NavarroKa Vargas67% (3)
- Funcionesrecursivas 160613150854Document31 pagesFuncionesrecursivas 160613150854Ka VargasPas encore d'évaluation
- Ordenamiento y BusquedaDocument30 pagesOrdenamiento y BusquedaKa VargasPas encore d'évaluation
- El Algoritmo CORDICDocument13 pagesEl Algoritmo CORDICmiteratosPas encore d'évaluation
- Manual de Montaje, Armado y Reparacion de PCDocument153 pagesManual de Montaje, Armado y Reparacion de PCRoberto CuevaPas encore d'évaluation
- CIFADOSDocument46 pagesCIFADOSLizzie LCPas encore d'évaluation
- IEC101Document79 pagesIEC101Jairon QuiroaPas encore d'évaluation
- Manual de Uso Cortadora LaserDocument19 pagesManual de Uso Cortadora LasergescobarPas encore d'évaluation
- Uso de Comparador en El Pic 12f675 FerreroDocument5 pagesUso de Comparador en El Pic 12f675 FerreroZeroPas encore d'évaluation
- Guia OctavoDocument47 pagesGuia OctavoLuis Alfredo Arias HernandezPas encore d'évaluation
- Mapa Conceptual Del MicroprocesadorDocument16 pagesMapa Conceptual Del Microprocesadorpqzm50% (2)
- Manual de APIDocument47 pagesManual de APIHardy Fernandez BecerraPas encore d'évaluation
- Arquitectura de Von NeumannDocument14 pagesArquitectura de Von NeumannGuadalupe AlcaláPas encore d'évaluation
- Manual Vag ComDocument4 pagesManual Vag ComÁngel Gallegos SienesPas encore d'évaluation
- Actividad 1 en Clase Segundo ParcialDocument5 pagesActividad 1 en Clase Segundo Parcialarturo cabelloPas encore d'évaluation
- Examen InglesDocument5 pagesExamen InglesDennis Perez ortizPas encore d'évaluation
- Manual Informatica Basica-1Document47 pagesManual Informatica Basica-1Juliana SalaPas encore d'évaluation
- Estructura CPUDocument8 pagesEstructura CPUHumberto Boone AbdoPas encore d'évaluation
- Aprendiendo Aprogramar PIC Con CCSDocument58 pagesAprendiendo Aprogramar PIC Con CCSAndres Raul Bruno SaraviaPas encore d'évaluation
- Actividad 2.1 PDFDocument5 pagesActividad 2.1 PDFYukiAsunaPas encore d'évaluation
- Octavo Cuadernillo 01 2021 VR Final - RemovedDocument15 pagesOctavo Cuadernillo 01 2021 VR Final - RemovedHelmer Hernández RosalesPas encore d'évaluation
- Step 7 - Awl para s7-300 y s7-400Document268 pagesStep 7 - Awl para s7-300 y s7-400gianperoza100% (1)
- Memoria CacheDocument22 pagesMemoria CacheMauricioPas encore d'évaluation
- Programación de MCUDocument28 pagesProgramación de MCUapi-27535945100% (2)
- Tema 1. Introduccion A Los SODocument27 pagesTema 1. Introduccion A Los SODaniel PascualPas encore d'évaluation
- Reporte #1 Lab de AutomatizacionDocument14 pagesReporte #1 Lab de AutomatizacionJorge FloresPas encore d'évaluation
- Unidad 07 Micro20I EPIET PDFDocument89 pagesUnidad 07 Micro20I EPIET PDFCésar GuerreroPas encore d'évaluation
- Foro Microcontroladores PDFDocument5 pagesForo Microcontroladores PDFMarielSanchezRuizPas encore d'évaluation
- CLASE 1 Iniciación A La Programación de SIMATIC S7-1200 SCE ES 010-010 R1209 Startup S7-1200Document63 pagesCLASE 1 Iniciación A La Programación de SIMATIC S7-1200 SCE ES 010-010 R1209 Startup S7-1200ZanesLTPas encore d'évaluation