Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Diagnostic Communication Manager Module in AUTOSARDocument7 pagesDiagnostic Communication Manager Module in AUTOSARShyam Bhat100% (1)
- Help Document For TicTacToeDocument5 pagesHelp Document For TicTacToeShyam BhatPas encore d'évaluation
- Krupa MahaleDocument2 pagesKrupa MahaleShyam BhatPas encore d'évaluation
- Algorithm To Find Dasamsha Chart From Birth ChartDocument3 pagesAlgorithm To Find Dasamsha Chart From Birth ChartShyam BhatPas encore d'évaluation
- Yoga COmputation Code in VbaDocument162 pagesYoga COmputation Code in VbaShyam BhatPas encore d'évaluation
- Algorithm to find navamsha chart from birth chartDocument3 pagesAlgorithm to find navamsha chart from birth chartShyam BhatPas encore d'évaluation
- Lord Kalki Meets PadmavatiDocument5 pagesLord Kalki Meets PadmavatiShyam BhatPas encore d'évaluation
- Gaius SMW Incest Sister BrotherDocument5 pagesGaius SMW Incest Sister BrotherShyam BhatPas encore d'évaluation
- A Toy To Be LovedDocument28 pagesA Toy To Be LovedShyam BhatPas encore d'évaluation
- NSRDocument4 pagesNSRShyam BhatPas encore d'évaluation
- Cast A HoroscopeDocument4 pagesCast A HoroscopeavisanPas encore d'évaluation
- Cast A HoroscopeDocument4 pagesCast A HoroscopeavisanPas encore d'évaluation
- Wikipedia ContentsDocument7 pagesWikipedia ContentsShyam BhatPas encore d'évaluation
- Algorithm to find navamsha chart from birth chartDocument3 pagesAlgorithm to find navamsha chart from birth chartShyam BhatPas encore d'évaluation
- CAN Specification Version 2 BOSCHDocument73 pagesCAN Specification Version 2 BOSCHdigitales100% (4)
- Wa0005 PDFDocument2 pagesWa0005 PDFsrinivasanPas encore d'évaluation
- Assignment EvsDocument21 pagesAssignment EvsShyam BhatPas encore d'évaluation
- Serial Bus Communication Protocols - CAN: Lesson - 19Document22 pagesSerial Bus Communication Protocols - CAN: Lesson - 19jasonPas encore d'évaluation
- Assignment 2Document6 pagesAssignment 2Shyam BhatPas encore d'évaluation
- Assignment - 2 2016 - FinalDocument5 pagesAssignment - 2 2016 - FinalShyam BhatPas encore d'évaluation
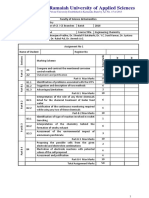
- M. S. Ramaiah University of Applied Sciences: Faculty of Engineering & TechnologyDocument5 pagesM. S. Ramaiah University of Applied Sciences: Faculty of Engineering & TechnologyShyam BhatPas encore d'évaluation
- ESC106A Assignment 1Document6 pagesESC106A Assignment 1Shyam BhatPas encore d'évaluation
- ESC106A Assignment 2Document6 pagesESC106A Assignment 2Shyam BhatPas encore d'évaluation
- Faculty of Engineering and Technology M. S. Ramaiah University of Applied SciencesDocument7 pagesFaculty of Engineering and Technology M. S. Ramaiah University of Applied SciencesShyam BhatPas encore d'évaluation
- Nutrilite Pvt. LTD.: Founder: Dr. Narayan PrasadDocument26 pagesNutrilite Pvt. LTD.: Founder: Dr. Narayan PrasadShyam BhatPas encore d'évaluation
- BSC105A Assignment 2 - 21st Nov 2016Document4 pagesBSC105A Assignment 2 - 21st Nov 2016Shyam BhatPas encore d'évaluation
- FET Assingnment1 QuestionsDocument6 pagesFET Assingnment1 QuestionsShyam BhatPas encore d'évaluation
- BSC105A Assignment 1 - 12th October 2016Document4 pagesBSC105A Assignment 1 - 12th October 2016Shyam BhatPas encore d'évaluation
- Assignment TemplateDocument15 pagesAssignment TemplateShyam BhatPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Mod 1 1 Concepts of Everyday LeadershipDocument26 pagesMod 1 1 Concepts of Everyday LeadershipSaifuzzaman AntorPas encore d'évaluation
- ĐỀ CHUẨN MINH HỌA SỐ 03Document17 pagesĐỀ CHUẨN MINH HỌA SỐ 03Lê Thị Ngọc ÁnhPas encore d'évaluation
- Fathers House MansionsDocument3 pagesFathers House Mansionswilf12100% (1)
- Semaphore Twinsoft Manual PDFDocument101 pagesSemaphore Twinsoft Manual PDFReza AnantoPas encore d'évaluation
- Fraud under Indian Contract Act - Essentials and Exceptions to Mere SilenceDocument6 pagesFraud under Indian Contract Act - Essentials and Exceptions to Mere SilenceabhilashPas encore d'évaluation
- Vegetation of PakistanDocument10 pagesVegetation of PakistanAhmad sadiqPas encore d'évaluation
- Tiger Rising Teachers' GuideDocument6 pagesTiger Rising Teachers' GuideCandlewick Press50% (2)
- Impact On Modern TechnologyDocument2 pagesImpact On Modern TechnologyNasrullah Khan AbidPas encore d'évaluation
- 9851 BCG Vaccine Professional HCWDocument4 pages9851 BCG Vaccine Professional HCWIuliana PanaitPas encore d'évaluation
- Magnolia Residences Tower D Promo - 20% Downpayment OptionDocument1 pageMagnolia Residences Tower D Promo - 20% Downpayment OptionLiv ValdezPas encore d'évaluation
- Tugas BHS InggrisDocument2 pagesTugas BHS InggrisJust NestPas encore d'évaluation
- De Sagun, Leila Camille A. BSN3Y1-1B NCMB312-LEC Course Task #4 Burn InjuriesDocument2 pagesDe Sagun, Leila Camille A. BSN3Y1-1B NCMB312-LEC Course Task #4 Burn InjuriesCarl Santos50% (2)
- ECO 201 Sample Midterm Exam (Paulo GuimaraesDocument14 pagesECO 201 Sample Midterm Exam (Paulo GuimaraesAhmed NegmPas encore d'évaluation
- Important Tips On The Law On SalesDocument34 pagesImportant Tips On The Law On SalesJanetGraceDalisayFabreroPas encore d'évaluation
- Minutes: Motion Was Submitted For ResolutionDocument29 pagesMinutes: Motion Was Submitted For Resolutionayen cusiPas encore d'évaluation
- Almeda v. CaDocument10 pagesAlmeda v. CaRuss TuazonPas encore d'évaluation
- All Glory Book-1Document187 pagesAll Glory Book-1fredkayf100% (1)
- Ethics Module 1-7Document57 pagesEthics Module 1-7Maey RoledaPas encore d'évaluation
- Florence NightingaleDocument11 pagesFlorence NightingaleSharmaine Palattao LappayPas encore d'évaluation
- Corruption PDFDocument11 pagesCorruption PDFkaleemullahPas encore d'évaluation
- Sources of Coherent RadiationDocument7 pagesSources of Coherent RadiationSubhash DhungelPas encore d'évaluation
- Bio 140 Exam 4 ReviewDocument7 pagesBio 140 Exam 4 Reviewlp_blackoutPas encore d'évaluation
- SDSDDocument114 pagesSDSDbhatiasabPas encore d'évaluation
- Business English Syllabus GuideDocument48 pagesBusiness English Syllabus Guidenicoler1110% (1)
- Belief MatrixDocument1 pageBelief Matrixapi-384108912Pas encore d'évaluation
- 7 Basic Control ActionsDocument27 pages7 Basic Control ActionsAhmad ElsheemyPas encore d'évaluation
- (13-14) - Modeling of Thermal SystemsDocument33 pages(13-14) - Modeling of Thermal SystemsmawooaPas encore d'évaluation
- The Septuagint A Critical AnalysisDocument76 pagesThe Septuagint A Critical AnalysisscaunasPas encore d'évaluation
- November 2008Document14 pagesNovember 2008Aldrin ThomasPas encore d'évaluation
- Anatomy One LinersDocument10 pagesAnatomy One Linersridin007100% (2)