Vous aimerez peut-être aussi
- DP Physics Topic 5 Quiz1 AnswersDocument2 pagesDP Physics Topic 5 Quiz1 AnswersRiddhi Dixit100% (1)
- Physics-12-Ch 11 & 12 & 13-SolnsDocument134 pagesPhysics-12-Ch 11 & 12 & 13-SolnsASUSuserusb0% (2)
- Dynamics Unit TestDocument6 pagesDynamics Unit TestKeval DavePas encore d'évaluation
- Atomic PhysicsDocument18 pagesAtomic PhysicsAnonymous ffLrUFPas encore d'évaluation
- Moments of Inertia Lab ReportDocument4 pagesMoments of Inertia Lab ReportAmiruddinMohktarPas encore d'évaluation
- Waves On A String LabDocument6 pagesWaves On A String LabBria' MurrayPas encore d'évaluation
- Student Exploration: Temperature and Particle MotionDocument4 pagesStudent Exploration: Temperature and Particle MotionKimberly TaboraPas encore d'évaluation
- Transport Properties of The Gas (Physical Chemistry 2)Document29 pagesTransport Properties of The Gas (Physical Chemistry 2)Adilla Rizka YonitaPas encore d'évaluation
- Standing Waves WorksheetDocument2 pagesStanding Waves WorksheetAdib HassanPas encore d'évaluation
- Experiment 5 Title: Acceleration of Free Fall by Means of The Simple Pendulum. ObjectiveDocument2 pagesExperiment 5 Title: Acceleration of Free Fall by Means of The Simple Pendulum. ObjectiveReam MairPas encore d'évaluation
- Activities For ReportsDocument7 pagesActivities For ReportsHungry Versatile GamerPas encore d'évaluation
- E.over.m RatioDocument8 pagesE.over.m Ratiobrain221304Pas encore d'évaluation
- Experiment of Ohm's LawDocument8 pagesExperiment of Ohm's LawIstiak AhmedPas encore d'évaluation
- Electromagnetic FieldsDocument4 pagesElectromagnetic FieldsKrishna Reddy SvvsPas encore d'évaluation
- Maxwell's EquationsDocument19 pagesMaxwell's EquationsEr Ashish Baheti100% (1)
- Photoelectric Effect PDFDocument7 pagesPhotoelectric Effect PDFVenu GopalPas encore d'évaluation
- Experiment. 4 AIM:To Find Refractive Index of The Given Liquid Samples and Find MolarDocument3 pagesExperiment. 4 AIM:To Find Refractive Index of The Given Liquid Samples and Find Molarrida fatimaPas encore d'évaluation
- 11 Chemistry Notes Ch02 Structure of AtomDocument18 pages11 Chemistry Notes Ch02 Structure of AtomSayantanBanerjee0% (1)
- Radioactivity - PDFDocument8 pagesRadioactivity - PDFWhite Heart100% (2)
- AC Bridge CircuitsDocument25 pagesAC Bridge CircuitsabcedePas encore d'évaluation
- Nitrogen Phosphorus Detector TheoryDocument3 pagesNitrogen Phosphorus Detector TheoryVarun Kumar100% (1)
- Ferro Dia para Magnetism PDFDocument11 pagesFerro Dia para Magnetism PDFShanna-Kay Wood-Davidson100% (1)
- EEN2056 Tutorial 2Document2 pagesEEN2056 Tutorial 2Paramesvaran Veerasingam100% (1)
- Lee's Disc Method: Thermal Conductivity: Aim of The ExperimentDocument6 pagesLee's Disc Method: Thermal Conductivity: Aim of The ExperimentAryan VermaPas encore d'évaluation
- Spontaneous Change Entropy and Free EnergyDocument46 pagesSpontaneous Change Entropy and Free EnergyStephanie MejiaPas encore d'évaluation
- Chapter 12 - Kinematics of Particles Sample ProblemsDocument82 pagesChapter 12 - Kinematics of Particles Sample ProblemsZizhen JiPas encore d'évaluation
- Magnetic FieldDocument12 pagesMagnetic FieldJai Hui100% (1)
- MCQ From Sound & WaveDocument3 pagesMCQ From Sound & WaveRaktimPas encore d'évaluation
- 02 Carrier Transport PhenomenaDocument28 pages02 Carrier Transport PhenomenaVikas PsPas encore d'évaluation
- Chapter 04 Radiation Characteristics of Opaque MaterialsDocument34 pagesChapter 04 Radiation Characteristics of Opaque Materialssaad alotaibiPas encore d'évaluation
- The Schrödinger Equation in One DimensionDocument23 pagesThe Schrödinger Equation in One DimensionjunaidPas encore d'évaluation
- Lab 12 - Total Internal ReflectionDocument2 pagesLab 12 - Total Internal Reflectionapi-408463795Pas encore d'évaluation
- Vibrating Strings Sample Lab ReportDocument6 pagesVibrating Strings Sample Lab Reportlam10440% (5)
- PHYS 102 - Exam 1 - Spring 2015: Identify The Choice That Best Completes The Statement or Answers The QuestionDocument6 pagesPHYS 102 - Exam 1 - Spring 2015: Identify The Choice That Best Completes The Statement or Answers The QuestionKeilla Romabiles LeopandoPas encore d'évaluation
- Millikan Oil Drop ExperimentDocument6 pagesMillikan Oil Drop ExperimenthammadhussainPas encore d'évaluation
- Question Bank On Atomic Structure-2Document7 pagesQuestion Bank On Atomic Structure-2Raju SinghPas encore d'évaluation
- Lab Report MarchDocument4 pagesLab Report MarchTom EnglishPas encore d'évaluation
- To Investigate The Characteristics of A Parallel DC Circuit and To Verify Kirchhoff's Current Law (KCL)Document4 pagesTo Investigate The Characteristics of A Parallel DC Circuit and To Verify Kirchhoff's Current Law (KCL)Apu Sarkar0% (2)
- Electric Fields and Electric PotentialsDocument4 pagesElectric Fields and Electric PotentialsVellie Johnson100% (1)
- Variation of Magnetic FieldDocument2 pagesVariation of Magnetic FieldVinit Kumar50% (2)
- Absorption of Gamma Rays BZ 20151123Document8 pagesAbsorption of Gamma Rays BZ 20151123salmanPas encore d'évaluation
- Theory of Ballastic GalvanometerDocument4 pagesTheory of Ballastic GalvanometerAniket Patel (Annu)Pas encore d'évaluation
- Mind Map Physical ChemDocument1 pageMind Map Physical ChemhusnaPas encore d'évaluation
- Kinetic Vs Thermodynamic ControlDocument20 pagesKinetic Vs Thermodynamic ControlNgua GiaPas encore d'évaluation
- Ib Magnetism - AllDocument14 pagesIb Magnetism - AllAarav VermaPas encore d'évaluation
- Williamson 2007 (I2)Document5 pagesWilliamson 2007 (I2)hongluc1991Pas encore d'évaluation
- Physics Notes - TransistorsDocument11 pagesPhysics Notes - TransistorsJoseph ZhuangPas encore d'évaluation
- Chapter # 21 Nuclear PhysicsDocument7 pagesChapter # 21 Nuclear PhysicsAsif Rasheed RajputPas encore d'évaluation
- First Order Active Filters (LPF, HPF) : (A) Low Pass FilterDocument12 pagesFirst Order Active Filters (LPF, HPF) : (A) Low Pass FilterVRPas encore d'évaluation
- Human Eye and Colourful WorldDocument1 pageHuman Eye and Colourful Worldcarl8chocoPas encore d'évaluation
- Problem Set 5 Work and Kinetic Energy SolutionsDocument14 pagesProblem Set 5 Work and Kinetic Energy SolutionsRohitPas encore d'évaluation
- Mechanics of Materials Torsion TestDocument18 pagesMechanics of Materials Torsion Testjrkling100% (1)
- Half Life CalculationsDocument6 pagesHalf Life CalculationsHelen NgPas encore d'évaluation
- 13.kinetic Theory PDFDocument30 pages13.kinetic Theory PDFNaliniPas encore d'évaluation
- ch25 PDFDocument21 pagesch25 PDFRodrigo S QuirinoPas encore d'évaluation
- Free VibrationDocument5 pagesFree VibrationLokesh DandgavalPas encore d'évaluation
- Rec3 SolutionsDocument6 pagesRec3 SolutionsOscar Martinez0% (1)
- Fiz3 FoyDocument62 pagesFiz3 FoyCeren DENİZPas encore d'évaluation
- Phy Lecture 1Document22 pagesPhy Lecture 1TikTok vs AnimePas encore d'évaluation
- Vibrations of A Free-Free BeamDocument6 pagesVibrations of A Free-Free BeamCaresmaPas encore d'évaluation
- This Is The Standard Lorentz Transformation Applied To The 4-Vector Differential DV, With DV The Space Conponent and DV The Time PartDocument9 pagesThis Is The Standard Lorentz Transformation Applied To The 4-Vector Differential DV, With DV The Space Conponent and DV The Time PartPraveen Dennis XavierPas encore d'évaluation
- Component Maintenance Manual 3505788Document1 pageComponent Maintenance Manual 3505788Praveen Dennis XavierPas encore d'évaluation
- Zin, Justin, Finite Temperature QFTDocument65 pagesZin, Justin, Finite Temperature QFTPraveen Dennis XavierPas encore d'évaluation
- Derivation of Schrodinger Equation From Newtonian Mechanics, E NelsonDocument7 pagesDerivation of Schrodinger Equation From Newtonian Mechanics, E NelsonPraveen Dennis XavierPas encore d'évaluation
- EffPotential SeminarDocument25 pagesEffPotential SeminarPraveen Dennis XavierPas encore d'évaluation
- Masters Sim RunDocument29 pagesMasters Sim RunPraveen Dennis XavierPas encore d'évaluation
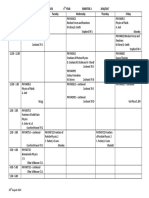
- TimetableDocument1 pageTimetablePraveen Dennis XavierPas encore d'évaluation
- Title First Word Starts With A Capital: Your Name and (If Joint) Partner Name Your Student NumberDocument15 pagesTitle First Word Starts With A Capital: Your Name and (If Joint) Partner Name Your Student NumberPraveen Dennis XavierPas encore d'évaluation
- CP Violation and D Physics: Chris ParkesDocument23 pagesCP Violation and D Physics: Chris ParkesPraveen Dennis XavierPas encore d'évaluation
- Calculating SigmaDocument5 pagesCalculating SigmaPraveen Dennis XavierPas encore d'évaluation
- TimetableDocument1 pageTimetablePraveen Dennis XavierPas encore d'évaluation
- 9HW Acids Bases QuestionsDocument3 pages9HW Acids Bases QuestionsPraveen Dennis XavierPas encore d'évaluation
- Phi 4 FieldDocument1 pagePhi 4 FieldPraveen Dennis XavierPas encore d'évaluation
- Case Study 011Document1 pageCase Study 011Praveen Dennis XavierPas encore d'évaluation
- Profile of AuditsDocument12 pagesProfile of AuditsDr. Shantanu PaulPas encore d'évaluation
- KL3112 - 2-Channel Analog Input Terminal 0 20 MaDocument1 pageKL3112 - 2-Channel Analog Input Terminal 0 20 MaMahmoud Abd-Elhamid Abu EyadPas encore d'évaluation
- Notes On DC Track CircuitDocument50 pagesNotes On DC Track CircuitVikas Srivastav94% (16)
- Sample Paper 7: Class XII 2023-24 PhysicsDocument6 pagesSample Paper 7: Class XII 2023-24 PhysicsBhaviniPas encore d'évaluation
- Aravindh PPTDocument12 pagesAravindh PPTpandiarajkgPas encore d'évaluation
- Application of Low Frequency Dielectric Spectroscopy To EstimateDocument4 pagesApplication of Low Frequency Dielectric Spectroscopy To EstimateAnggiPas encore d'évaluation
- Intensity ModulationDocument3 pagesIntensity Modulationanon-323096100% (1)
- 28 The Electric Field Version 1Document13 pages28 The Electric Field Version 1Abdul Munim100% (1)
- VANGUARD ct8000Document6 pagesVANGUARD ct8000juan primoPas encore d'évaluation
- Wire Current RatingsDocument1 pageWire Current Ratingszul5107Pas encore d'évaluation
- Power Thyristors - MDT760Document2 pagesPower Thyristors - MDT760Srinivas K VamanamurthyPas encore d'évaluation
- TMP 2 C17Document18 pagesTMP 2 C17FrontiersPas encore d'évaluation
- LM3875TDocument19 pagesLM3875TJasten S DeleñaPas encore d'évaluation
- 3TL Certificates OverviewDocument2 pages3TL Certificates OverviewHilal HazaaPas encore d'évaluation
- 330C EXCAVADORA Sistema ImplementoDocument8 pages330C EXCAVADORA Sistema Implementoy2npbp6fgsPas encore d'évaluation
- SUN2000-215KTL-H0 Smart String Inverter: Circuit Diagram Efficiency CurveDocument2 pagesSUN2000-215KTL-H0 Smart String Inverter: Circuit Diagram Efficiency CurveOmar TorresPas encore d'évaluation
- RCD Type F: Residual Current Protection For Single Phase Inverters ApplicationsDocument28 pagesRCD Type F: Residual Current Protection For Single Phase Inverters ApplicationsAndy FarleyPas encore d'évaluation
- Optical Instruments Theory and ExamplesDocument14 pagesOptical Instruments Theory and ExamplesCrewdex ProPas encore d'évaluation
- Four-Position Sectionalizing Loadbreak SwitchesDocument8 pagesFour-Position Sectionalizing Loadbreak SwitchesGustavo PérezPas encore d'évaluation
- Soldering Iron NetworkingDocument13 pagesSoldering Iron NetworkingMae Jane AguilarPas encore d'évaluation
- STK416-090-E: 3-Channel Power Switching Audio Power IC, 80W+80W+80WDocument12 pagesSTK416-090-E: 3-Channel Power Switching Audio Power IC, 80W+80W+80WChristopher Ulices Mendieta VasquezPas encore d'évaluation
- Experion MXDocument170 pagesExperion MXLuiz PipinoPas encore d'évaluation
- HA17431GPATZ-E: EOS PowerDocument15 pagesHA17431GPATZ-E: EOS Powerserrano.flia.coPas encore d'évaluation
- Magnetism in SolidsDocument11 pagesMagnetism in SolidsNeelam KapoorPas encore d'évaluation
- E976-10 Standard Guide For Determining The Reproducibility of Acoustic ...Document7 pagesE976-10 Standard Guide For Determining The Reproducibility of Acoustic ...MULTISERVICE CHSPas encore d'évaluation
- Iso 6Document2 pagesIso 6Tanesan WyotPas encore d'évaluation
- 220kv Phu Tho v6Document712 pages220kv Phu Tho v6Thanh Tâm100% (1)
- AC Current Sensing DesignDocument23 pagesAC Current Sensing Designsriyer212Pas encore d'évaluation
- Grade 10 Physics Chapter 3 Revision Problems - Answer Key: Multiple Choice Questions. Q1Document6 pagesGrade 10 Physics Chapter 3 Revision Problems - Answer Key: Multiple Choice Questions. Q1NONO0% (1)
- Photovoltaic Module Monocrystalline 60: Certificates WarrantiesDocument2 pagesPhotovoltaic Module Monocrystalline 60: Certificates WarrantiesAlmiro Boavida NhancalePas encore d'évaluation