Vous aimerez peut-être aussi
- Southern Marine Engineering Desk Reference: Second Edition Volume IiD'EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiPas encore d'évaluation
- Propeller Shaft & Universal JointDocument22 pagesPropeller Shaft & Universal JointaaraPas encore d'évaluation
- A Complete Introduction to Mountain Biking: Survival FitnessD'EverandA Complete Introduction to Mountain Biking: Survival FitnessPas encore d'évaluation
- Transmission PDFDocument20 pagesTransmission PDFmohammadPas encore d'évaluation
- Ch-4 Propeller Shaft & Universal Joint: By, Deep Shah Sub: ATM (3330202)Document24 pagesCh-4 Propeller Shaft & Universal Joint: By, Deep Shah Sub: ATM (3330202)mharitmsPas encore d'évaluation
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsD'EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsÉvaluation : 4 sur 5 étoiles4/5 (1)
- It Is The Total Mechanism That Transmit The Power Developed of The Engine Going To The Drive Wheels of The VehicleDocument90 pagesIt Is The Total Mechanism That Transmit The Power Developed of The Engine Going To The Drive Wheels of The VehicleManny AnacletoPas encore d'évaluation
- Drive Shaft PDFDocument14 pagesDrive Shaft PDFnamduong368Pas encore d'évaluation
- Propeller Shaft Univ JointDocument7 pagesPropeller Shaft Univ JointGoutham ReddyPas encore d'évaluation
- AT - 3 and 4Document14 pagesAT - 3 and 4vandanaharikumarPas encore d'évaluation
- Rear Axle Operation PDFDocument4 pagesRear Axle Operation PDFparchure123Pas encore d'évaluation
- Propeller Shaft:: Experiment No: 3 Study of Transfer Case, Propeller Shaft, Slip Joint and Universal JointDocument5 pagesPropeller Shaft:: Experiment No: 3 Study of Transfer Case, Propeller Shaft, Slip Joint and Universal JointRamesh Kavitha Sanjit 18BME0677Pas encore d'évaluation
- Drive LinesDocument30 pagesDrive LinesRITESH ROHILLAPas encore d'évaluation
- Propeller Shaft Joint TypesDocument7 pagesPropeller Shaft Joint TypesMayur PanchalPas encore d'évaluation
- Automobile Systems: Unit - IIDocument30 pagesAutomobile Systems: Unit - IISasankBabuPas encore d'évaluation
- Different Kinds of MechanismsDocument31 pagesDifferent Kinds of Mechanismslockenload92% (13)
- Unit 5 Final Drive: StructureDocument7 pagesUnit 5 Final Drive: Structuretejap314Pas encore d'évaluation
- Automatic Transmission BasicsDocument20 pagesAutomatic Transmission BasicsDwy Bagus NPas encore d'évaluation
- Automotive (2) Lab: EXP2: Manual Transmission and TransaxlesDocument10 pagesAutomotive (2) Lab: EXP2: Manual Transmission and TransaxlesMohammad YahyaPas encore d'évaluation
- Mechxausters AssignmentDocument11 pagesMechxausters AssignmentHardik RangwaniPas encore d'évaluation
- Automatic TransmissionDocument20 pagesAutomatic TransmissionAravindSaju100% (3)
- Type of Gears Trains and The Methods To Find Train ValueDocument14 pagesType of Gears Trains and The Methods To Find Train Valueabbas bilalPas encore d'évaluation
- Parkinson Gear Tester ReportDocument35 pagesParkinson Gear Tester Reportkirubason100% (3)
- Drive and Suspension Components ExplainedDocument11 pagesDrive and Suspension Components ExplainedLowry GuettaPas encore d'évaluation
- 1-Machine Elements 1Document20 pages1-Machine Elements 1Alicemal DüzgünPas encore d'évaluation
- Study and Demonstration of Rear Axle AssemblyDocument12 pagesStudy and Demonstration of Rear Axle AssemblySANURASAGARPas encore d'évaluation
- Chapter6-Drive To WheelsDocument21 pagesChapter6-Drive To WheelsShivam AgarwalPas encore d'évaluation
- Gear Can Be DefinedDocument31 pagesGear Can Be Definedasisha mostPas encore d'évaluation
- Automobile Suspension and Steering SystemsDocument11 pagesAutomobile Suspension and Steering Systemspawan sharmaPas encore d'évaluation
- AE AnswersDocument5 pagesAE AnswersKoppala BhanuPas encore d'évaluation
- Ax Lens Us PensionDocument42 pagesAx Lens Us PensionJeremy TherkelsenPas encore d'évaluation
- Manual Transmissions: Design, Operation & ComponentsDocument29 pagesManual Transmissions: Design, Operation & ComponentsBhushan Verma100% (1)
- Differential Gear MechanismDocument32 pagesDifferential Gear MechanismMohammad Amir100% (2)
- PRESENTION 2 MPPDocument28 pagesPRESENTION 2 MPPKhairul SyahreelPas encore d'évaluation
- Types of Gears in Final Drive ExplainedDocument9 pagesTypes of Gears in Final Drive ExplainedVasantha SeelanPas encore d'évaluation
- 153698234-Summer-Training-Report-at - Jtekt .Document42 pages153698234-Summer-Training-Report-at - Jtekt .Amit AryaPas encore d'évaluation
- DifferentialDocument12 pagesDifferentialRaghul PrasaathPas encore d'évaluation
- Transmission Paper Short QuestionsDocument18 pagesTransmission Paper Short QuestionsAbdurrehman HashmiPas encore d'évaluation
- Front Drive Axles: CV JointDocument20 pagesFront Drive Axles: CV Jointstefanovicana1Pas encore d'évaluation
- Propeller Shaft, Slip Joints, Universal Joints, Differential & Rear Axle Drive Systems ExplainedDocument30 pagesPropeller Shaft, Slip Joints, Universal Joints, Differential & Rear Axle Drive Systems ExplainedThulasi RamPas encore d'évaluation
- Quá-trình_AVCN-2Document37 pagesQuá-trình_AVCN-2tranquangg0608Pas encore d'évaluation
- 10 - Front Axle & Steering SystemDocument29 pages10 - Front Axle & Steering SystemDeep Umradiya100% (1)
- Design and Analysis of Gear Train in a Gear BoxDocument96 pagesDesign and Analysis of Gear Train in a Gear BoxVinayak RaoPas encore d'évaluation
- Baithi AVCN 2Document37 pagesBaithi AVCN 2Khanh ĐinhPas encore d'évaluation
- Maintain and Repair Mechanical Drives and Transmission AssembliesDocument141 pagesMaintain and Repair Mechanical Drives and Transmission AssembliesMelku Abebe100% (1)
- Steering FinalDocument16 pagesSteering FinalJộè Řɓm Jŕ.Pas encore d'évaluation
- Automotive Transmission SystemDocument94 pagesAutomotive Transmission SystemTanzim Rafat AyonPas encore d'évaluation
- Bài 1 Rack and Pinion Steering SystemDocument34 pagesBài 1 Rack and Pinion Steering SystemPham DuyPas encore d'évaluation
- See Figures 1 Thru 7: Suspension SystemDocument28 pagesSee Figures 1 Thru 7: Suspension SystembalajigandhirajanPas encore d'évaluation
- Differential and Drive AxlesDocument38 pagesDifferential and Drive AxlesShivam Wankhede100% (2)
- K Steering SystemDocument27 pagesK Steering SystemBaze GirmaPas encore d'évaluation
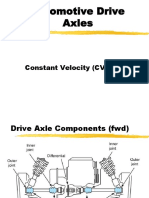
- Automotive Drive Axles: Constant Velocity (CV) TypesDocument88 pagesAutomotive Drive Axles: Constant Velocity (CV) TypesIndrajeet KumarPas encore d'évaluation
- Passenger Car Drive Axle Gear DesignDocument74 pagesPassenger Car Drive Axle Gear DesignCarlo_Filippin75% (4)
- Unit 2-At6402 Automotive ChassisDocument20 pagesUnit 2-At6402 Automotive ChassisSathis KumarPas encore d'évaluation
- Comparison With Drive Mechanisms: Cogs, Which Mesh With Another Toothed Part in Order To Transmit TorqueDocument23 pagesComparison With Drive Mechanisms: Cogs, Which Mesh With Another Toothed Part in Order To Transmit TorqueAshish DeotalePas encore d'évaluation
- Mini Project Report: Differential Gear SystemDocument22 pagesMini Project Report: Differential Gear SystemSonu DasPas encore d'évaluation
- Summer Training Report at Sona Koyo Steering Systems Ltd.Document36 pagesSummer Training Report at Sona Koyo Steering Systems Ltd.Arvind JangirPas encore d'évaluation
- STEERING TECHNOLOGIESDocument10 pagesSTEERING TECHNOLOGIESDebayan Dhar ChoudhuryPas encore d'évaluation
- Rear Axle Drives ForcesDocument35 pagesRear Axle Drives ForcesSreeram HPas encore d'évaluation
- Single Dwell 0Document10 pagesSingle Dwell 0Mohammad YahyaPas encore d'évaluation
- FSAE Design Score Sheet 150pt Class1 PDFDocument8 pagesFSAE Design Score Sheet 150pt Class1 PDFMohammad YahyaPas encore d'évaluation
- Prepared By: Rabah Alnatour Instructor: DR - Tamer Alshagareen Teaching Assistant: Eng. Jamal AlamayrehDocument13 pagesPrepared By: Rabah Alnatour Instructor: DR - Tamer Alshagareen Teaching Assistant: Eng. Jamal AlamayrehMohammad YahyaPas encore d'évaluation
- Double DwellDocument9 pagesDouble DwellMohammad YahyaPas encore d'évaluation
- ASSDocument10 pagesASSMohammad YahyaPas encore d'évaluation
- Automotive (2) Lab: EXP1: ClutchesDocument7 pagesAutomotive (2) Lab: EXP1: ClutchesMohammad YahyaPas encore d'évaluation
- Automotive (2) Lab: EXP2: Manual Transmission and TransaxlesDocument10 pagesAutomotive (2) Lab: EXP2: Manual Transmission and TransaxlesMohammad YahyaPas encore d'évaluation
- Automotive (2) Lab: EXP4: Automatic Transmissions and TransaxlesDocument6 pagesAutomotive (2) Lab: EXP4: Automatic Transmissions and TransaxlesMohammad YahyaPas encore d'évaluation
- Automotive (2) Lab: Tires and Wheels SystemDocument5 pagesAutomotive (2) Lab: Tires and Wheels SystemMohammad YahyaPas encore d'évaluation
- Automotive (2) Lab: Braking SystemDocument5 pagesAutomotive (2) Lab: Braking SystemMohammad YahyaPas encore d'évaluation
- Automotive (2) Lab: Suspension SystemDocument8 pagesAutomotive (2) Lab: Suspension SystemMohammad YahyaPas encore d'évaluation
- Automotive (2) Lab: Steering SystemDocument7 pagesAutomotive (2) Lab: Steering SystemMohammad YahyaPas encore d'évaluation
- Writing HWDocument5 pagesWriting HWMinh LêPas encore d'évaluation
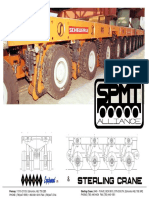
- SPMT SpecificationsDocument15 pagesSPMT SpecificationsAnonymous qT66pyKPas encore d'évaluation
- Pionjar 120Document40 pagesPionjar 120Igor Halterbeck HalterbeckPas encore d'évaluation
- Hy-Wire CarDocument21 pagesHy-Wire CarengineervimalPas encore d'évaluation
- Drive Right Chapter 10 Driving in Rural AreasDocument27 pagesDrive Right Chapter 10 Driving in Rural Areasapi-279470525Pas encore d'évaluation
- T-55 Chassis Fitted With S-60 57 MM Gun in Iraq - Armament Research Services (ARES)Document2 pagesT-55 Chassis Fitted With S-60 57 MM Gun in Iraq - Armament Research Services (ARES)tyrant88Pas encore d'évaluation
- Cuaderno de Actividades Fisica 3Document12 pagesCuaderno de Actividades Fisica 3luis vimos callePas encore d'évaluation
- Yokohama Eng 20170217 Fix05Document28 pagesYokohama Eng 20170217 Fix05AriKurniawanPas encore d'évaluation
- Kubota KX027-4Document8 pagesKubota KX027-4Goran MatovicPas encore d'évaluation
- Electric Door Actuator for BusesDocument2 pagesElectric Door Actuator for BusesClodoaldo FonsecaPas encore d'évaluation
- Accessory DrivesDocument2 pagesAccessory Drivesbassumudhol100% (1)
- 2005 MKV Fuse Diagram - VW Vortex - Volkswagen ForumDocument11 pages2005 MKV Fuse Diagram - VW Vortex - Volkswagen ForumMarco Antonio Ortiz RomeroPas encore d'évaluation
- Fuel System DiagnosisDocument34 pagesFuel System DiagnosisAhmed AbazaPas encore d'évaluation
- 950L and 962L Wheel Loaders TA2 Technical Inspection (0372, 0374, 1000, 7000, 753T, 7565)Document13 pages950L and 962L Wheel Loaders TA2 Technical Inspection (0372, 0374, 1000, 7000, 753T, 7565)Wilbort Encomenderos RuizPas encore d'évaluation
- VW Tiguan 2 Propshaft Rear Final Drive EngDocument87 pagesVW Tiguan 2 Propshaft Rear Final Drive Engjose reirizPas encore d'évaluation
- Electronic Service Information System (ERWIN - ERWIN) 8Document46 pagesElectronic Service Information System (ERWIN - ERWIN) 8Marius PopPas encore d'évaluation
- GAS ENGINE PHASE 3 SENSORSDocument39 pagesGAS ENGINE PHASE 3 SENSORSfachrulPas encore d'évaluation
- Kalyani Powertrain Ltd-4Nov2022Document32 pagesKalyani Powertrain Ltd-4Nov2022Sreekanth DevarasettyPas encore d'évaluation
- Benni Mini Workshop Manual 2013 Cap 2Document298 pagesBenni Mini Workshop Manual 2013 Cap 2Daniel Pérez ObandoPas encore d'évaluation
- Piper M600 SLS BrochureDocument12 pagesPiper M600 SLS Brochurelegoulu21Pas encore d'évaluation
- 2.0 Engine Mechanical System - General InformationDocument16 pages2.0 Engine Mechanical System - General InformationstevoxPas encore d'évaluation
- Extreme Automatics 2004R: PrefaceDocument7 pagesExtreme Automatics 2004R: Preface966538830882Pas encore d'évaluation
- Jeep Cherokee - Grand Cherokee 1993 - 1997Document1 pageJeep Cherokee - Grand Cherokee 1993 - 1997sluis770% (1)
- Maintenance 05.2017Document236 pagesMaintenance 05.2017Laios Alberto NicolaPas encore d'évaluation
- Ad 600Document2 pagesAd 600MohamedBenMansourPas encore d'évaluation
- Twin Clutch TransmissionDocument237 pagesTwin Clutch TransmissionAkash Mankar100% (1)
- 416E Vs 416D Product Buletin (TEJB9168)Document36 pages416E Vs 416D Product Buletin (TEJB9168)firman manaluPas encore d'évaluation
- 4G93 transmission fluidsDocument3 pages4G93 transmission fluidsCarl AriffPas encore d'évaluation
- NGK Sparkplug Cat 2013 New PDFDocument155 pagesNGK Sparkplug Cat 2013 New PDFnicutax100% (1)
- 5HP24A GeneraldataDocument51 pages5HP24A GeneraldataDerek Barlow100% (1)