Vous aimerez peut-être aussi
- Experiemnt 4 Screw JackDocument13 pagesExperiemnt 4 Screw JackMansoob BukhariPas encore d'évaluation
- Belt Friction ExperimentDocument12 pagesBelt Friction ExperimentMuhd aziq FikriPas encore d'évaluation
- Worm and Worm WheelDocument8 pagesWorm and Worm WheelMBilal MughalPas encore d'évaluation
- Lab Manual Mechanics-IIDocument26 pagesLab Manual Mechanics-IIEngr Muhammad Imran100% (1)
- SHEAR CENTRE Lab ReportDocument16 pagesSHEAR CENTRE Lab ReportAthirah Dinata100% (2)
- Universal Governor AppartusDocument21 pagesUniversal Governor Appartusramniwas123Pas encore d'évaluation
- LAB MEC424-Slider CrankDocument7 pagesLAB MEC424-Slider CrankAhmad Fadzlan93% (15)
- CentrifugalDocument21 pagesCentrifugalLovisha HorrilPas encore d'évaluation
- Moment of Inertia of FlywheelDocument18 pagesMoment of Inertia of Flywheelgaurav singhPas encore d'évaluation
- Inclined Planed Report (K)Document10 pagesInclined Planed Report (K)Ibrahim Yahya100% (1)
- Experiment 2 - Shear Force in BeamsDocument8 pagesExperiment 2 - Shear Force in BeamsSubuk T. Rathod100% (1)
- Lab Manual Engineering MechanicsDocument34 pagesLab Manual Engineering MechanicsBrajesh Kumar Sahu100% (2)
- Lab Report (Reaction of Forces On A Simply Supported Beam)Document10 pagesLab Report (Reaction of Forces On A Simply Supported Beam)Muhammad Abubakar Shahzad Talib ShahzadPas encore d'évaluation
- Torsion Test For Mild Steel BarsDocument5 pagesTorsion Test For Mild Steel BarsShweta Pradhan100% (1)
- Torsion Test LabDocument10 pagesTorsion Test Labnitrous150% (2)
- Torsion of Cylindrical RodsDocument16 pagesTorsion of Cylindrical RodsStephen Mirdo83% (18)
- Balancing CONCLUSIONDocument2 pagesBalancing CONCLUSIONSyahdi Rosli100% (1)
- Experiment No. 2: Slider Crank MechanismDocument6 pagesExperiment No. 2: Slider Crank MechanismLovekesh100% (1)
- To Calculate The Efficiency ofDocument10 pagesTo Calculate The Efficiency ofMayank BarserPas encore d'évaluation
- Central Deflection of A Simply Supported BeamDocument10 pagesCentral Deflection of A Simply Supported BeamwaqarPas encore d'évaluation
- Full Hacksaw ReportDocument7 pagesFull Hacksaw ReportIqbalRifat0% (1)
- Belt and Rope FrictionDocument14 pagesBelt and Rope FrictionSadeesh Manuja100% (1)
- Lab Report - 2Document3 pagesLab Report - 2Gowtham Ragunathan100% (1)
- Lab Report - Four Bar ChainDocument10 pagesLab Report - Four Bar ChainShakoor Dahlan44% (9)
- 2 - Torsion TestDocument14 pages2 - Torsion TestKaarthiek Kanagasundaram KaarthiekPas encore d'évaluation
- Shear Force and Bending MomentDocument5 pagesShear Force and Bending MomentSudarshan DukePas encore d'évaluation
- Abstract and Introduction of Torsion TestDocument4 pagesAbstract and Introduction of Torsion TestM.USMAN BIN AHMEDPas encore d'évaluation
- Bending Stress in A BeamDocument11 pagesBending Stress in A BeamFarrukh78% (9)
- Experimentation & Instrumentation MECH 212: Experiment 5: Universal CouplingDocument16 pagesExperimentation & Instrumentation MECH 212: Experiment 5: Universal CouplingTanya DeebPas encore d'évaluation
- Discussion Marcet BoilerDocument2 pagesDiscussion Marcet BoilerIfa Ismail100% (2)
- Belt Drive Experiment PDFDocument9 pagesBelt Drive Experiment PDFFajar Rumanto100% (1)
- HP Lab Report TrifilarDocument11 pagesHP Lab Report TrifilarHorciuxes IraniPas encore d'évaluation
- Tensile Test of Mild SteelDocument6 pagesTensile Test of Mild SteelAnshuman Dash100% (2)
- Marcet Boiler ExperimentDocument4 pagesMarcet Boiler ExperimentMohammed Islam100% (1)
- EXPERIMENT 3: Deflection of Simply Supported Beam and Cantilever Beam Cantilever BeamDocument7 pagesEXPERIMENT 3: Deflection of Simply Supported Beam and Cantilever Beam Cantilever BeamZol Has100% (1)
- S3-Deflection in Beam and CantileverDocument97 pagesS3-Deflection in Beam and CantileverBruh100% (1)
- Lab Experiment 1: Buckling of ColumnsDocument14 pagesLab Experiment 1: Buckling of Columnsabhishek kumarPas encore d'évaluation
- Temperature Measurement Lab Report PDFDocument13 pagesTemperature Measurement Lab Report PDFjackjbandara1100% (1)
- Torsion Testing ExperimentDocument11 pagesTorsion Testing ExperimentAnoj pahathkumburaPas encore d'évaluation
- Exp 2 Flow Visualization 2012Document6 pagesExp 2 Flow Visualization 2012Said Mohd Umar UmarPas encore d'évaluation
- Lab Report No 7Document10 pagesLab Report No 7Mansoob Bukhari67% (3)
- Lab Report 05Document24 pagesLab Report 05sandeepa nakanadalaPas encore d'évaluation
- Experiment No 3Document3 pagesExperiment No 3pomar026100% (1)
- Lab Report AircondDocument4 pagesLab Report AircondSuraya JasmaniPas encore d'évaluation
- Emm3812 - Static and Dynamic BalancingDocument7 pagesEmm3812 - Static and Dynamic Balancingsyamil100% (3)
- Discussion& Conclusion TorsionDocument2 pagesDiscussion& Conclusion TorsionKabuki MaskPas encore d'évaluation
- Scotch Yoke MechanismDocument5 pagesScotch Yoke MechanismSurendran Sai50% (4)
- Trifilar Suspension Lab Report 1Document24 pagesTrifilar Suspension Lab Report 1Chia Bing Xuan100% (2)
- Experiment 3 Reaction TurbineDocument20 pagesExperiment 3 Reaction TurbineAnonymous T7vjZG4ot100% (1)
- Lab 4 Termo Sem 2Document22 pagesLab 4 Termo Sem 2Fgj JhgPas encore d'évaluation
- ExperimentsDocument4 pagesExperimentsRohitGuptaPas encore d'évaluation
- Spring TestDocument5 pagesSpring Testmohanadymt50% (2)
- Worm and Worm WheelDocument2 pagesWorm and Worm Wheelzacoss70% (10)
- Gear Efficiency - DoneDocument11 pagesGear Efficiency - DoneKevin Tan50% (2)
- Group Members Lindsey T. Puso 16000575 Thato K. Moeng 16000237 Kaone Botiloeng 16000363 Matthew Lephole 16000501 Toy L. Pelonomi 16000837Document9 pagesGroup Members Lindsey T. Puso 16000575 Thato K. Moeng 16000237 Kaone Botiloeng 16000363 Matthew Lephole 16000501 Toy L. Pelonomi 16000837Priince Mogomotsi100% (1)
- T C Fisica IiDocument2 pagesT C Fisica Iicristian alberto sabogal roaPas encore d'évaluation
- Eltech Lab 1Document6 pagesEltech Lab 1michael yankovskyPas encore d'évaluation
- Tristar AnswersDocument22 pagesTristar AnswersMine SayracPas encore d'évaluation
- The T-Test For Correlated SamplesDocument9 pagesThe T-Test For Correlated SamplesSeranicoustic BandPas encore d'évaluation
- Dogging Guide 2003 - WorkCover NSWDocument76 pagesDogging Guide 2003 - WorkCover NSWtadeumatas100% (1)
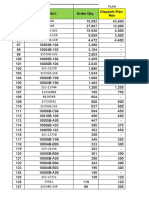
- Order Qty Vs Dispatch Plan - 04 11 20Document13 pagesOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPPas encore d'évaluation
- Design For Manufacturing Course - by DFRDocument257 pagesDesign For Manufacturing Course - by DFRhlgc63100% (2)
- Estimation Software For Presure VesselDocument36 pagesEstimation Software For Presure VesselKarthikeyan Shanmugavel0% (1)
- 2013 11 DUPLEX EasyDocument21 pages2013 11 DUPLEX EasyAnonymous HC0tWePas encore d'évaluation
- Help - Translating A CAD Stewart Platform - Computer-Aided Design Translation (SimMechanics™ Link)Document8 pagesHelp - Translating A CAD Stewart Platform - Computer-Aided Design Translation (SimMechanics™ Link)ĐinhĐứcAnhPas encore d'évaluation
- Crankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsDocument6 pagesCrankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsKukuh SeptiantoPas encore d'évaluation
- EN 1991-1-4 NA enDocument4 pagesEN 1991-1-4 NA enanuj3936100% (1)
- A9K CatalogueDocument152 pagesA9K CatalogueMohamed SaffiqPas encore d'évaluation
- Schematic Lenovo ThinkPad T410 NOZOMI-1Document99 pagesSchematic Lenovo ThinkPad T410 NOZOMI-1borneocampPas encore d'évaluation
- A Sample of Wet Soil Has A Volume of 0Document8 pagesA Sample of Wet Soil Has A Volume of 0eph0% (1)
- Le22a1321 AocDocument130 pagesLe22a1321 AocEchefisEchefisPas encore d'évaluation
- Safety Data Sheet 84989 41 3 enDocument4 pagesSafety Data Sheet 84989 41 3 enAdhiatma Arfian FauziPas encore d'évaluation
- Method StatementDocument4 pagesMethod StatementtayitbatovPas encore d'évaluation
- How Is Electrical Energy MeasuredDocument4 pagesHow Is Electrical Energy MeasuredSonya ReddyPas encore d'évaluation
- Formulas To RememberDocument6 pagesFormulas To Rememberuygurzeren100% (3)
- D 2510 - 94 R98Document3 pagesD 2510 - 94 R98David Cazorla100% (1)
- Pro TrekDocument4 pagesPro TrekTri WidodoPas encore d'évaluation
- Fiber Optic Trainer/ Fiber & OSP TechnicianDocument7 pagesFiber Optic Trainer/ Fiber & OSP Technicianapi-78570706Pas encore d'évaluation
- Capstone Documentation RevisedDocument5 pagesCapstone Documentation RevisedMary Joy BolinaPas encore d'évaluation
- Tharmal Analysis BasicsDocument56 pagesTharmal Analysis BasicsNetoPas encore d'évaluation
- Advanced Fluid Mechanics: Luigi Di Micco Email: Luigi - Dimicco@dicea - Unipd.itDocument16 pagesAdvanced Fluid Mechanics: Luigi Di Micco Email: Luigi - Dimicco@dicea - Unipd.itHubert MoforPas encore d'évaluation
- Adjusting Well Pump Pressure SwitchesDocument1 pageAdjusting Well Pump Pressure SwitchesD_D_76Pas encore d'évaluation
- Bs en 00378 3 2016Document30 pagesBs en 00378 3 2016Darius VinPas encore d'évaluation
- Autodesk Inventor - Sheet Metal Punch IfeaturesDocument6 pagesAutodesk Inventor - Sheet Metal Punch IfeaturesNdianabasi UdonkangPas encore d'évaluation
- Curriculum Vitae: Augusto Javier Puican ZarpanDocument4 pagesCurriculum Vitae: Augusto Javier Puican Zarpanfrank_d_1Pas encore d'évaluation
- Waqas Riaz: Total Years of Experience: 2 Years ObjectiveDocument2 pagesWaqas Riaz: Total Years of Experience: 2 Years ObjectiveIrfanPas encore d'évaluation
- BPSK SimulinkDocument13 pagesBPSK SimulinkpootommyPas encore d'évaluation
- Huawei ACU2 Wireless Access Controller DatasheetDocument12 pagesHuawei ACU2 Wireless Access Controller Datasheetdexater007Pas encore d'évaluation