Vous aimerez peut-être aussi
- Javascript Notes For ProfessionalsDocument490 pagesJavascript Notes For ProfessionalsDragos Stefan NeaguPas encore d'évaluation
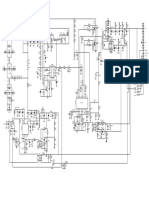
- LG Eax62865601-8, Eay62169401Document1 pageLG Eax62865601-8, Eay62169401СергейPas encore d'évaluation
- Hydraulic System:-: Chapter-2 Hydraulic, Pneumatic and Electrical Telemetry SystemsDocument7 pagesHydraulic System:-: Chapter-2 Hydraulic, Pneumatic and Electrical Telemetry SystemsMayur ParmarPas encore d'évaluation
- Chapter 2 Physical Properties of Hydraulic FluidsDocument108 pagesChapter 2 Physical Properties of Hydraulic FluidsTùng TrầnPas encore d'évaluation
- Preventing Sheet Metal Wrinkling in Coil Lines PDFDocument88 pagesPreventing Sheet Metal Wrinkling in Coil Lines PDFDominika LisPas encore d'évaluation
- Alpha Linear Systems UsDocument155 pagesAlpha Linear Systems Usatanas kolevPas encore d'évaluation
- Pump Station System Curves Session 1Document29 pagesPump Station System Curves Session 1Toan LePas encore d'évaluation
- Hydrualic Cylinder Drift ProblemDocument5 pagesHydrualic Cylinder Drift Problemsai0% (1)
- Circuits - CourseDocument93 pagesCircuits - Coursehasan bish100% (1)
- Electrical Machines - 2 (Book)Document330 pagesElectrical Machines - 2 (Book)A APas encore d'évaluation
- Feedbacks in Hydraulic Servo Systems RydbergDocument21 pagesFeedbacks in Hydraulic Servo Systems Rydbergc1ronPas encore d'évaluation
- HydraulicsDocument253 pagesHydraulicsvelavansuPas encore d'évaluation
- Mechatronics Lab ManualDocument54 pagesMechatronics Lab ManualAjay Chacko100% (1)
- Chain Pull CalculationsDocument39 pagesChain Pull Calculationsmech_abhi100% (2)
- Electrohydraulic ValvesDocument9 pagesElectrohydraulic Valves1sympatyagaPas encore d'évaluation
- CH 21 AnswersDocument26 pagesCH 21 AnswersArjav DesaiPas encore d'évaluation
- 2 Sim Hydraulics ReferenceDocument430 pages2 Sim Hydraulics ReferenceEnrico GambiniPas encore d'évaluation
- CM P4621 22 ISSUE A Winche Cabrestante MacGregorDocument185 pagesCM P4621 22 ISSUE A Winche Cabrestante MacGregorpevalpevalPas encore d'évaluation
- PLC Stepper Motor ControllerDocument12 pagesPLC Stepper Motor ControllerSibtain Ul Hassan100% (1)
- Fan Starting TorqueDocument4 pagesFan Starting Torquehardik033Pas encore d'évaluation
- Two Stage Electro-Hydraulic Servo ValveDocument4 pagesTwo Stage Electro-Hydraulic Servo ValveabhijitmukhPas encore d'évaluation
- F-29 Hose Handling CraneDocument100 pagesF-29 Hose Handling CraneSHANANDPas encore d'évaluation
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 pagesModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JosePas encore d'évaluation
- Bul 36115 Servo Valve OperationDocument12 pagesBul 36115 Servo Valve Operationrikkitech100% (1)
- Bulk Modulus 1Document17 pagesBulk Modulus 1rocks100% (1)
- Equipment SizingDocument9 pagesEquipment SizingAnonymous Hy5Ir9QXPas encore d'évaluation
- 2-Matrices and DeterminantsDocument42 pages2-Matrices and DeterminantsslowjamsPas encore d'évaluation
- Lab Manual-H & P-1me2603Document40 pagesLab Manual-H & P-1me2603Hi helloPas encore d'évaluation
- Heat Recovery From Composting A Comprehensive Review of System Design Recovery Rate and UtilizationDocument13 pagesHeat Recovery From Composting A Comprehensive Review of System Design Recovery Rate and UtilizationAnonymous Hy5Ir9QXPas encore d'évaluation
- Bischof Et Al - Advances in Automatic DifferentiDocument366 pagesBischof Et Al - Advances in Automatic DifferentiTanNguyễn100% (2)
- Experiment No: 2: AIM: To Study and Simulate Single Phase Semi Control of DC Separately Excited MotorDocument29 pagesExperiment No: 2: AIM: To Study and Simulate Single Phase Semi Control of DC Separately Excited MotorPratik K AnandparaPas encore d'évaluation
- Matrix Methods For Optical LayoutDocument133 pagesMatrix Methods For Optical LayoutAmaniDarwishPas encore d'évaluation
- User Manual: Couple Tank ExperimentDocument22 pagesUser Manual: Couple Tank ExperimentRUBEN DARIO TAMAYO BALLIVIANPas encore d'évaluation
- Lie Groups New Research Mathematics Research Developments Series PDFDocument627 pagesLie Groups New Research Mathematics Research Developments Series PDFFany100% (2)
- Akarmak Autoclaves PDFDocument28 pagesAkarmak Autoclaves PDFAnonymous Hy5Ir9QXPas encore d'évaluation
- Modelling and Simulation of Mechatronic SystemsDocument37 pagesModelling and Simulation of Mechatronic SystemsEnes Umur GökçekPas encore d'évaluation
- Pendulum SimulinkDocument10 pagesPendulum SimulinkSatyavir YadavPas encore d'évaluation
- 0karabulut EhaDocument171 pages0karabulut EhaCumhur ÖzbaşPas encore d'évaluation
- SKEM 3742 Electro Hydraulic LabsheetDocument6 pagesSKEM 3742 Electro Hydraulic Labsheetcikgu_relaPas encore d'évaluation
- SimulinkDocument36 pagesSimulinkloreggjuc3mPas encore d'évaluation
- Multi 9 Catalogue Ƒinal PDFDocument195 pagesMulti 9 Catalogue Ƒinal PDFms100% (1)
- A. Alexakis PHD Thesis - FINALDocument438 pagesA. Alexakis PHD Thesis - FINALdodikPas encore d'évaluation
- Flow ControlDocument3 pagesFlow ControlGuilherme PagatiniPas encore d'évaluation
- Kaizen Super - ManualDocument59 pagesKaizen Super - Manualvser19100% (1)
- Introduction To Control Valves: Fluid Mechanics, Hydraulics & PneumaticsDocument25 pagesIntroduction To Control Valves: Fluid Mechanics, Hydraulics & Pneumaticsshahzaibkhan ccpPas encore d'évaluation
- Hidraulic Servovalve SystemDocument111 pagesHidraulic Servovalve SystemJc MenjívarPas encore d'évaluation
- SR-D100 User's Manual - E PDFDocument138 pagesSR-D100 User's Manual - E PDFRLome RicardoPas encore d'évaluation
- Project Report On Speed Control of DC Motor by Using PWM Technique 4Document76 pagesProject Report On Speed Control of DC Motor by Using PWM Technique 4Vishal SharmaPas encore d'évaluation
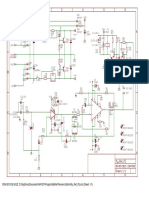
- My - Ref - FE - SchematicDocument1 pageMy - Ref - FE - SchematicJangkrikPas encore d'évaluation
- WAgo PLC ManDocument506 pagesWAgo PLC ManpaulPas encore d'évaluation
- Automation and Robotics LabDocument38 pagesAutomation and Robotics LabRanjit KumarPas encore d'évaluation
- Extra Exercise Pneumatics Sequence CircuitDocument1 pageExtra Exercise Pneumatics Sequence CircuitJ.m.MoraPas encore d'évaluation
- Scilab BasicsDocument22 pagesScilab Basics'babi MulugetaPas encore d'évaluation
- Katalog Hagglunds Motor CBM TypeDocument28 pagesKatalog Hagglunds Motor CBM TypeRudianto SakkaPas encore d'évaluation
- How To Interpret Hydraulic Control Diagrams. Brendan Casey Marian TumarkinDocument7 pagesHow To Interpret Hydraulic Control Diagrams. Brendan Casey Marian Tumarkinbedo zezoPas encore d'évaluation
- Sheet 1Document3 pagesSheet 1OmaroMohsenPas encore d'évaluation
- Matlab Simulink For Control082pDocument39 pagesMatlab Simulink For Control082pWills TtaccaPas encore d'évaluation
- TELEPNEUMATICDocument104 pagesTELEPNEUMATICmoijPas encore d'évaluation
- Thermodynamics and Hydraulics PDFDocument2 pagesThermodynamics and Hydraulics PDFraumil1237590Pas encore d'évaluation
- Codesys Scan Network PDFDocument70 pagesCodesys Scan Network PDFedwin ramirezPas encore d'évaluation
- Modeling and Control of A Distributed Generation SystemDocument24 pagesModeling and Control of A Distributed Generation SystemRabindra MaharjanPas encore d'évaluation
- Transducer Basics ModifiedDocument78 pagesTransducer Basics ModifiedAmit RegePas encore d'évaluation
- Hydraulic Power System Analys..., R. Smith (CRC, 2006) WWDocument7 pagesHydraulic Power System Analys..., R. Smith (CRC, 2006) WWntinossPas encore d'évaluation
- Differential Transformation Method for Mechanical Engineering ProblemsD'EverandDifferential Transformation Method for Mechanical Engineering ProblemsPas encore d'évaluation
- Prpc27 Mechatronics and Industrial AUTOMATION (Theory & Lab)Document2 pagesPrpc27 Mechatronics and Industrial AUTOMATION (Theory & Lab)Jerome SamuelPas encore d'évaluation
- Ejercicios ClaseDocument5 pagesEjercicios ClaseDuvan BayonaPas encore d'évaluation
- RENGJ Volume 17 Issue 5 Pages 1 14Document14 pagesRENGJ Volume 17 Issue 5 Pages 1 14Khang TruongPas encore d'évaluation
- Automatic Control SystemDocument8 pagesAutomatic Control SystemArun GoraiPas encore d'évaluation
- Acs Est 6b06281Document10 pagesAcs Est 6b06281Md. Rashedul IslamPas encore d'évaluation
- Bioconversion of Organic Residues For Rural CommunitiesDocument1 pageBioconversion of Organic Residues For Rural CommunitiesAnonymous Hy5Ir9QXPas encore d'évaluation
- A Fuzzy Composting Process Model PDFDocument17 pagesA Fuzzy Composting Process Model PDFAnonymous Hy5Ir9QXPas encore d'évaluation
- Application of Validated Mathematical Model of ComDocument8 pagesApplication of Validated Mathematical Model of ComAnonymous Hy5Ir9QXPas encore d'évaluation
- Application of A Dynamic Model To The Simulation of The Composting ProcessDocument10 pagesApplication of A Dynamic Model To The Simulation of The Composting ProcessAnonymous Hy5Ir9QXPas encore d'évaluation
- Doi I375218 001Document108 pagesDoi I375218 001RO-AM-BDPas encore d'évaluation
- 2-1 Complete Recausticizing - Principles and PracticeDocument30 pages2-1 Complete Recausticizing - Principles and PracticeWiPas encore d'évaluation
- Lime Slakers: 8485 Parkhill Drive Milton, Ontario Canada L9T 5E9Document4 pagesLime Slakers: 8485 Parkhill Drive Milton, Ontario Canada L9T 5E9Anonymous Hy5Ir9QXPas encore d'évaluation
- 1 s2.0 S0144860903000293 MainDocument20 pages1 s2.0 S0144860903000293 MainAnonymous Hy5Ir9QXPas encore d'évaluation
- Kinetics of The Cao/Ca (Oh) Hydration/Dehydration Reaction For Thermochemical Energy Storage ApplicationsDocument33 pagesKinetics of The Cao/Ca (Oh) Hydration/Dehydration Reaction For Thermochemical Energy Storage ApplicationsAnonymous Hy5Ir9QXPas encore d'évaluation
- Modelianje Emulgatora PDFDocument84 pagesModelianje Emulgatora PDFAnonymous Hy5Ir9QXPas encore d'évaluation
- Pressure Chamber PDFDocument1 pagePressure Chamber PDFAnonymous Hy5Ir9QXPas encore d'évaluation
- Omega Series 41 Detention Slakers PDFDocument2 pagesOmega Series 41 Detention Slakers PDFsoumyarm942Pas encore d'évaluation
- Detention Lime Slaker: Series 85Document2 pagesDetention Lime Slaker: Series 85Marcelo GuarachiPas encore d'évaluation
- Computing With Fortran by Haselbacher PDFDocument202 pagesComputing With Fortran by Haselbacher PDFAnonymous Hy5Ir9QXPas encore d'évaluation
- Modeling An Industrial Lime Slaking Process MatzDocument6 pagesModeling An Industrial Lime Slaking Process MatzAnonymous Hy5Ir9QXPas encore d'évaluation
- Adaptive ControllerDocument15 pagesAdaptive Controllerasd dsaPas encore d'évaluation
- IM ModelingDocument27 pagesIM ModelingIrfan QureshiPas encore d'évaluation
- A514229 PDFDocument116 pagesA514229 PDFAnonymous Hy5Ir9QXPas encore d'évaluation
- Din 1045-1 Manual PDFDocument70 pagesDin 1045-1 Manual PDFAnonymous Hy5Ir9QXPas encore d'évaluation
- Autoclave 1Document8 pagesAutoclave 1Ava RanpoPas encore d'évaluation
- A Fuzzy Composting Process Model PDFDocument17 pagesA Fuzzy Composting Process Model PDFAnonymous Hy5Ir9QXPas encore d'évaluation
- R: A C & A: Obotics Dvanced OnceptsDocument77 pagesR: A C & A: Obotics Dvanced OnceptsAnonymous Hy5Ir9QXPas encore d'évaluation
- 2005 - Advanced Robotic Manipulation - OussamaKhatibDocument136 pages2005 - Advanced Robotic Manipulation - OussamaKhatibnachoflores214793Pas encore d'évaluation
- Autoclave 1Document8 pagesAutoclave 1Ava RanpoPas encore d'évaluation
- WinDelsol 1-0 UG EnglishDocument57 pagesWinDelsol 1-0 UG EnglishJhon J Ditta GranadosPas encore d'évaluation
- MTH002 Core MathematicsDocument11 pagesMTH002 Core MathematicsRicardo HoustonPas encore d'évaluation
- MATLAB Questions and Answers - Input and OutputDocument103 pagesMATLAB Questions and Answers - Input and OutputThiên NhãPas encore d'évaluation
- Language Fundamentals: Entering CommandsDocument109 pagesLanguage Fundamentals: Entering CommandsNor ManPas encore d'évaluation
- OR 6205 Deterministic Operations Research: Module 1: Introduction To Operations Research and Linear ProgrammingDocument39 pagesOR 6205 Deterministic Operations Research: Module 1: Introduction To Operations Research and Linear ProgrammingPraneeth Krishna0% (2)
- Image Processing & Computer Vision (ECL 451) Lab WorkbookDocument24 pagesImage Processing & Computer Vision (ECL 451) Lab WorkbookAnsh MathurPas encore d'évaluation
- Early Fault Detection of Machine Tools Based On Deep Learning and Dynamic IdentificationDocument9 pagesEarly Fault Detection of Machine Tools Based On Deep Learning and Dynamic IdentificationBushra AbbasPas encore d'évaluation
- Color Structure For Soft Gluon Resummation - A General RecipeDocument21 pagesColor Structure For Soft Gluon Resummation - A General RecipePaweł KowalczukPas encore d'évaluation
- BCSE I A2 Group CPNM Assignment 3: (Optional)Document2 pagesBCSE I A2 Group CPNM Assignment 3: (Optional)Anurag BandyopadhyayPas encore d'évaluation
- Models Rule Book AtpDocument53 pagesModels Rule Book AtpPablo GramajoPas encore d'évaluation
- ICS 4U1 - Unit #3 - Two Dimensional Arrays - Dec 7thDocument43 pagesICS 4U1 - Unit #3 - Two Dimensional Arrays - Dec 7thvexiox222Pas encore d'évaluation
- Package KFAS': R Topics DocumentedDocument21 pagesPackage KFAS': R Topics DocumentedshishirkashyapPas encore d'évaluation
- Linear Algebra: Vectors and Vector SpacesDocument4 pagesLinear Algebra: Vectors and Vector SpacesRohit SahuPas encore d'évaluation
- General and Simplified Computation of Fault Flow and Contribution of Distributed Sources in Unbalanced Distribution NetworksDocument8 pagesGeneral and Simplified Computation of Fault Flow and Contribution of Distributed Sources in Unbalanced Distribution NetworkshassanPas encore d'évaluation
- Linear Algebra - SyllabusDocument4 pagesLinear Algebra - SyllabusJUan GAbrielPas encore d'évaluation
- Final IT 100 - Abstract Algebra First Semester, School Year 2020-2021Document4 pagesFinal IT 100 - Abstract Algebra First Semester, School Year 2020-2021Baby Joy Jovita-BasubasPas encore d'évaluation
- 2009 - Tonkin - Calibration Constrained Monte Carlo Analysis of Highly Parameterized ModelsDocument17 pages2009 - Tonkin - Calibration Constrained Monte Carlo Analysis of Highly Parameterized ModelsedwarzambranoPas encore d'évaluation
- SAGE For Undergraduates.Document366 pagesSAGE For Undergraduates.zhazzuPas encore d'évaluation
- 1Document19 pages1Meena SharmaPas encore d'évaluation
- Adl Matrix in Strategy FormulationDocument7 pagesAdl Matrix in Strategy FormulationKaleemPas encore d'évaluation
- Mathematics FinalDocument731 pagesMathematics FinalChanduPas encore d'évaluation
- Gary NotesDocument160 pagesGary NotesFrancine Kye DelaCruzPas encore d'évaluation
- Arrow Security Pricing FormulaDocument3 pagesArrow Security Pricing FormulaNaresh SehdevPas encore d'évaluation
- MCQs UNIT I TO IVDocument15 pagesMCQs UNIT I TO IVPranav NimjePas encore d'évaluation
- Activity 6 Applicatiton of Determinants-1Document5 pagesActivity 6 Applicatiton of Determinants-1Georji kairuPas encore d'évaluation
- TAMUCALC72CRDocument22 pagesTAMUCALC72CRLeonardo CostaPas encore d'évaluation