Vous aimerez peut-être aussi
- Desarrollo seguro en ingeniería del software.: Aplicaciones seguras con Android, NodeJS, Python y C++D'EverandDesarrollo seguro en ingeniería del software.: Aplicaciones seguras con Android, NodeJS, Python y C++Pas encore d'évaluation
- Control neuronal y difuso para sistemas fotovoltaicosD'EverandControl neuronal y difuso para sistemas fotovoltaicosPas encore d'évaluation
- Detección y compensación de irregularidades de inyecciónD'EverandDetección y compensación de irregularidades de inyecciónPas encore d'évaluation
- Manual para Ecus Computadoras Automotriz y Funcion de Los SensoresDocument149 pagesManual para Ecus Computadoras Automotriz y Funcion de Los SensoresJoséLuis50% (2)
- 8d22de PDFDocument74 pages8d22de PDFfelipe choque100% (1)
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaD'EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaPas encore d'évaluation
- Proyecto de ResidenciaDocument78 pagesProyecto de ResidenciaJose RiosPas encore d'évaluation
- Modelado unidimensional de los motores de dos tiempos de pequeña cilindradaD'EverandModelado unidimensional de los motores de dos tiempos de pequeña cilindradaÉvaluation : 5 sur 5 étoiles5/5 (1)
- Dse5220 ManualDocument58 pagesDse5220 Manualolmcorpinsa86% (7)
- MT 22.9kv Fiscalia Chanchamayo 17-08-2010Document53 pagesMT 22.9kv Fiscalia Chanchamayo 17-08-2010Favio Villaverde Pacheco100% (2)
- KNX. Domótica e Inmótica: Guía Práctica para el instaladorD'EverandKNX. Domótica e Inmótica: Guía Práctica para el instaladorÉvaluation : 5 sur 5 étoiles5/5 (1)
- Proyectos Electonicos Con Microcontrolador PIC16F877ADocument100 pagesProyectos Electonicos Con Microcontrolador PIC16F877Ajeancrv1978Pas encore d'évaluation
- Guía de instalación para locales de pública concurrenciaD'EverandGuía de instalación para locales de pública concurrenciaÉvaluation : 5 sur 5 étoiles5/5 (1)
- Capitulo de 3 - 11Document224 pagesCapitulo de 3 - 11felipe choque100% (3)
- Pid en Allen BradleyDocument121 pagesPid en Allen Bradleychecko_125850% (2)
- Valvula Reductora de PresionDocument4 pagesValvula Reductora de PresionKelvin GutierrezPas encore d'évaluation
- Cambio de Correas Sistemas Auxiliares BMW E46 136 CVDocument9 pagesCambio de Correas Sistemas Auxiliares BMW E46 136 CVleoper100% (7)
- Daewoo Cielo MotorDocument151 pagesDaewoo Cielo MotorAlejoPas encore d'évaluation
- Diseno de Tesis ChataDocument185 pagesDiseno de Tesis Chatal clPas encore d'évaluation
- TTA CON LOGO-desbloqueadoDocument109 pagesTTA CON LOGO-desbloqueadoJavichu Yukyto100% (1)
- Tesis EntrenadorDocument157 pagesTesis EntrenadorJosue Grady Platero0% (1)
- Trabajo Fin de Estudios: Instalación Eléctrica y Domótica para Una Vivienda UnifamiliarDocument281 pagesTrabajo Fin de Estudios: Instalación Eléctrica y Domótica para Una Vivienda UnifamiliarFabian GutierrezPas encore d'évaluation
- BC Tes TMP 1146Document160 pagesBC Tes TMP 1146Luis Angel Yana ChoquePas encore d'évaluation
- Control para Taladro Electro-PneumaticoDocument148 pagesControl para Taladro Electro-PneumaticoRaphael GomezPas encore d'évaluation
- Tesis PDFDocument165 pagesTesis PDFrotsen173Pas encore d'évaluation
- Modernizacion de Maquina Inyectora de PlasticoDocument150 pagesModernizacion de Maquina Inyectora de PlasticoDAMIAN RAMIREZPas encore d'évaluation
- PFC Joaquin Bish TakeuchiDocument94 pagesPFC Joaquin Bish Takeuchisirrengifo9071Pas encore d'évaluation
- Ojeda Carlos Diseño Automatizacion .Industrial Bombeo Aguas AcidasDocument70 pagesOjeda Carlos Diseño Automatizacion .Industrial Bombeo Aguas AcidasAlfonso José García LagunaPas encore d'évaluation
- Sistema de RefrigeraciónDocument249 pagesSistema de RefrigeraciónHaroldTFPas encore d'évaluation
- Control LaserDocument137 pagesControl LaserGustavo A. Sarache MillanPas encore d'évaluation
- Diseño de Un Sistema de Gestion de Procesos para El Area de Embotellado de Cerveceria Nacional C N Planta QuitoDocument128 pagesDiseño de Un Sistema de Gestion de Procesos para El Area de Embotellado de Cerveceria Nacional C N Planta QuitoJaime VargasPas encore d'évaluation
- Autodis PDFDocument122 pagesAutodis PDFGustavo Guzmán GalarzaPas encore d'évaluation
- Ups GT000068Document202 pagesUps GT000068Jose MarcanoPas encore d'évaluation
- PFC Joaquin Bish TakeuchiDocument95 pagesPFC Joaquin Bish TakeuchiAndres BustamantePas encore d'évaluation
- Manual Avanzado de Pic (Recomendado)Document149 pagesManual Avanzado de Pic (Recomendado)Reynaldo MercadoPas encore d'évaluation
- Automotor Herramientas y Tecnicas de DiagnosticoDocument235 pagesAutomotor Herramientas y Tecnicas de DiagnosticosilvvPas encore d'évaluation
- Boost ConverterDocument63 pagesBoost Converteroscar100% (2)
- Berenice Montalvo LezamaDocument88 pagesBerenice Montalvo LezamaJavierPas encore d'évaluation
- Diseño e Implementacion de Un Banco de Pruebas Automatico para Las Mordazas Mecanicas en AllmaticDocument255 pagesDiseño e Implementacion de Un Banco de Pruebas Automatico para Las Mordazas Mecanicas en Allmaticanon_453104382Pas encore d'évaluation
- MuñozCristian 2022 IntegracionSistemaProteccionDocument61 pagesMuñozCristian 2022 IntegracionSistemaProteccionPedro JosePas encore d'évaluation
- LibroDePracticas PDFDocument196 pagesLibroDePracticas PDFCyvas100% (1)
- Construccion de TTA Con Prog PLC PDFDocument109 pagesConstruccion de TTA Con Prog PLC PDFHarrison UcrosPas encore d'évaluation
- Diseño y Simulación Del Sistema de Control y Monitoreo PDFDocument310 pagesDiseño y Simulación Del Sistema de Control y Monitoreo PDFF Sisniegas GCPas encore d'évaluation
- Guia Usuario M221 EIO0000000979.02Document1 240 pagesGuia Usuario M221 EIO0000000979.02LuisPas encore d'évaluation
- Automatizacion de Un Sistema de Banco de Agua Helada en La Empresa Pil Andina S.A.Document240 pagesAutomatizacion de Un Sistema de Banco de Agua Helada en La Empresa Pil Andina S.A.Nikol Lopez ValdezPas encore d'évaluation
- Prueba InicialDocument3 pagesPrueba InicialDiego Rubio SalvadorPas encore d'évaluation
- ControladorDocument187 pagesControladorcarlos ortizPas encore d'évaluation
- Rehabilitacion de Una Maquina Automatica de Frituras-DesbloqueadoDocument165 pagesRehabilitacion de Una Maquina Automatica de Frituras-DesbloqueadoCarlos Adrian HidalgoPas encore d'évaluation
- 2019 - Avila-Rea - Nueva Topología de Convertidor Electrónico de Potencia Como Driver de Un Motor de CDDocument108 pages2019 - Avila-Rea - Nueva Topología de Convertidor Electrónico de Potencia Como Driver de Un Motor de CDGerry GuadarramaPas encore d'évaluation
- TFM Identificacion y Control de Gran Area para Sistemas Electricos de PotenciaDocument84 pagesTFM Identificacion y Control de Gran Area para Sistemas Electricos de PotenciaAndres DPas encore d'évaluation
- TFG GarciaFerrinPatriciaDocument50 pagesTFG GarciaFerrinPatriciaLuis UgaldePas encore d'évaluation
- Capítulo 1Document48 pagesCapítulo 1turagoPas encore d'évaluation
- Guia de ProgramacionDocument316 pagesGuia de ProgramacionCarlos Quijivix100% (2)
- 43.1360 Valdieso Jacome Jose EduardoDocument62 pages43.1360 Valdieso Jacome Jose EduardoLeonardo GonzálezPas encore d'évaluation
- Microcontrollers FundamentalsDocument126 pagesMicrocontrollers FundamentalsMarco RosasPas encore d'évaluation
- 3 AscensoresDocument79 pages3 AscensoresTomas Sanchez TronoPas encore d'évaluation
- Tesis ElectronicaDocument2 pagesTesis ElectronicaMarioJoseTelcom100% (1)
- Banco de Prueba2007Document152 pagesBanco de Prueba2007Patricio Enrique CastroPas encore d'évaluation
- Manual Aqua Drive PagDocument26 pagesManual Aqua Drive PagAlbert Perez100% (1)
- 280575772-Thesis-Design-and-Implementation-of-a-Three-Phase-Induction-Motor-Control-Scheme (1) .En - EsDocument135 pages280575772-Thesis-Design-and-Implementation-of-a-Three-Phase-Induction-Motor-Control-Scheme (1) .En - EsCHRISTIANPas encore d'évaluation
- Implementacion de Operaciones Aritméticas y Lógicas en Una CPU Con Una Unidad de Control MicroprogramadaDocument31 pagesImplementacion de Operaciones Aritméticas y Lógicas en Una CPU Con Una Unidad de Control MicroprogramadaEliaquin Clavijo ManuttupaPas encore d'évaluation
- Electronica - Fuentes de Alimentación Reguladas y Variables - Book PDFDocument37 pagesElectronica - Fuentes de Alimentación Reguladas y Variables - Book PDFfelipe choquePas encore d'évaluation
- Chromite PDFDocument36 pagesChromite PDFfelipe choque60% (5)
- Cap3 Comprobacion InyectoresDocument12 pagesCap3 Comprobacion Inyectoresfelipe choquePas encore d'évaluation
- Universidad Del Azuay: Facultad de Ciencia y Tecnología Escuela de Ingeniería MecánicaDocument91 pagesUniversidad Del Azuay: Facultad de Ciencia y Tecnología Escuela de Ingeniería Mecánicafelipe choquePas encore d'évaluation
- T Uide 1313Document68 pagesT Uide 1313felipe choquePas encore d'évaluation
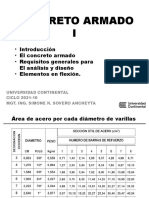
- Concreto Armado - Secciones Tipo TDocument49 pagesConcreto Armado - Secciones Tipo TDEIVIS JHOAN PANEZ RICALDIPas encore d'évaluation
- Cartillas ProduccionDocument85 pagesCartillas ProduccionG OchoPas encore d'évaluation
- Sesión 01Document40 pagesSesión 01Abel Alfio Martinez CruzPas encore d'évaluation
- Instrucciones de Movimiento de Datos y ComparaciónDocument9 pagesInstrucciones de Movimiento de Datos y ComparaciónJorge Aguirre0% (1)
- Tipos-Diseños de InvestigaciónDocument14 pagesTipos-Diseños de InvestigaciónLidio Omar Villena CorahuaPas encore d'évaluation
- Manejadores de Base de DatosDocument13 pagesManejadores de Base de Datosblynk182Pas encore d'évaluation
- Proyecto Brazo MecanicoDocument16 pagesProyecto Brazo MecanicoAndres BustosPas encore d'évaluation
- Informe 5 Mecanica de Fluidos ImprimirDocument16 pagesInforme 5 Mecanica de Fluidos ImprimirIvon MamaniPas encore d'évaluation
- Qué Es La Tinción de Gram y Cómo HacerlaDocument14 pagesQué Es La Tinción de Gram y Cómo HacerlaYahsé Rojas ChallaPas encore d'évaluation
- Examen Unidad 2 Estadística IIDocument8 pagesExamen Unidad 2 Estadística IIMarcelaPas encore d'évaluation
- Calculo DiferencialDocument2 pagesCalculo DiferencialjosePas encore d'évaluation
- TP2 - EnunciadoDocument3 pagesTP2 - EnunciadoSistemasutnPas encore d'évaluation
- TEORIA PASARELA Presfor PDFDocument16 pagesTEORIA PASARELA Presfor PDFMireya JimenezPas encore d'évaluation
- Variaciones Porcentuales, Aumentos y Descuentos LlapanaticDocument4 pagesVariaciones Porcentuales, Aumentos y Descuentos LlapanaticANGEL FRANCISCO YANAC ROQUEPas encore d'évaluation
- Triptico Algebbra LinealDocument2 pagesTriptico Algebbra LinealjackPas encore d'évaluation
- Serie UnicoDocument4 pagesSerie UnicoArchitects UioPas encore d'évaluation
- Práctica Conceptual 5Document2 pagesPráctica Conceptual 5Javier AbadPas encore d'évaluation
- Laboreo de Minas I CuadernilloDocument76 pagesLaboreo de Minas I CuadernilloFranco GallardoPas encore d'évaluation
- Reporte 3 El Osciloscopio La Unica Ventana A La Electronica Automotriz PDFDocument7 pagesReporte 3 El Osciloscopio La Unica Ventana A La Electronica Automotriz PDFManuel AmayaPas encore d'évaluation
- Resonancia SubsincronaDocument19 pagesResonancia SubsincronahectorPas encore d'évaluation
- TeSys F - LC1F95Document4 pagesTeSys F - LC1F95Luis MillaPas encore d'évaluation
- Ex-Final 2021-I (ML 140)Document2 pagesEx-Final 2021-I (ML 140)Nate River Near Vega HerreraPas encore d'évaluation
- Plan de Levantamiento e Izaje de CargaDocument2 pagesPlan de Levantamiento e Izaje de CargaAnyi CuervoPas encore d'évaluation
- Paper 5Document3 pagesPaper 5christian rodasPas encore d'évaluation
- Curso H2 Verde - Dia 1 - Producción de H2Document59 pagesCurso H2 Verde - Dia 1 - Producción de H2Francisco Ignacio Soto VergaraPas encore d'évaluation
- Codigos para ProgramacionDocument4 pagesCodigos para Programacionsaulo12Pas encore d'évaluation
- Reacciones Quimicas 1 y 2Document19 pagesReacciones Quimicas 1 y 2Diana lema lemaPas encore d'évaluation
- Sistema de UnidadesDocument3 pagesSistema de UnidadessamoPas encore d'évaluation