Vous aimerez peut-être aussi
- Tema2 - 4 - 4Document13 pagesTema2 - 4 - 4Juliän VillamizarPas encore d'évaluation
- Resumenes Capitulos 15 y 16 1Document8 pagesResumenes Capitulos 15 y 16 1Juliän VillamizarPas encore d'évaluation
- PDFDocument204 pagesPDFJuliän VillamizarPas encore d'évaluation
- Taller 1 - Pregunta 4, Grupo 4Document2 pagesTaller 1 - Pregunta 4, Grupo 4Juliän VillamizarPas encore d'évaluation
- Historia LinuxDocument7 pagesHistoria LinuxJuliän VillamizarPas encore d'évaluation
- Presentación FINALDocument22 pagesPresentación FINALJuliän VillamizarPas encore d'évaluation
- INGENIERIADocument23 pagesINGENIERIARosa M Vega GiraldoPas encore d'évaluation
- Subestaciones TecsurDocument4 pagesSubestaciones TecsurJensen Garcia RodriguezPas encore d'évaluation
- Methanex - Parque EolicoDocument16 pagesMethanex - Parque EolicoMirandaJonasPas encore d'évaluation
- OSCILADORESDocument4 pagesOSCILADORESJuanJoseVasquezCastilloPas encore d'évaluation
- Analisis de Costos Unitarios Opcion 2Document16 pagesAnalisis de Costos Unitarios Opcion 2Wilson PinedoPas encore d'évaluation
- Valoracion Economica y Sistemas de IluminacionDocument66 pagesValoracion Economica y Sistemas de IluminacionRimberty Valdivia CaceresPas encore d'évaluation
- Isolíneas o IsopletasDocument8 pagesIsolíneas o IsopletasDiego Alejandro Benites GalindoPas encore d'évaluation
- Hoja de Calculo CompresibilidadDocument10 pagesHoja de Calculo Compresibilidadcabrerajr7Pas encore d'évaluation
- Examen de MAS Fisica PDFDocument2 pagesExamen de MAS Fisica PDFJoe Hamilton Quiñonez DiazPas encore d'évaluation
- Dios Usa Lápiz Labial (Karen Berg)Document223 pagesDios Usa Lápiz Labial (Karen Berg)Analia Nawrath100% (3)
- Los Secretos Tibetanos de La Aterna Salud - Peter KelderDocument45 pagesLos Secretos Tibetanos de La Aterna Salud - Peter Keldersergi243100% (3)
- Diodos RectificadoresDocument2 pagesDiodos RectificadoresGabrielPas encore d'évaluation
- Flujo de FluidosDocument36 pagesFlujo de FluidosRojo Verdalet100% (1)
- AlternadorDocument14 pagesAlternadorJuan Carlos Cutipa BernaPas encore d'évaluation
- Cartel Etiquetas de Mercancias PeligrosasDocument1 pageCartel Etiquetas de Mercancias PeligrosasJCarlos ZúñigaPas encore d'évaluation
- Como Se Distribuye y Transporta La Energia ElectricaDocument9 pagesComo Se Distribuye y Transporta La Energia Electricahian oñaPas encore d'évaluation
- Caso EnunciadoDocument5 pagesCaso EnunciadoISEINDUSTRIALINTERNATIONAL SERIVCES S.A.S.Pas encore d'évaluation
- Ejercicios TransformadoresDocument8 pagesEjercicios TransformadoresFabian Gutierrez100% (1)
- EXAMEN 2do TRIMESTRE CILCO ESCOLAR 2022-2023Document2 pagesEXAMEN 2do TRIMESTRE CILCO ESCOLAR 2022-2023Jeritzia Latorre MartínezPas encore d'évaluation
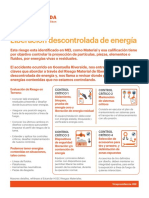
- Alerta HSE - Liberación Descontrolada de EnergíaDocument1 pageAlerta HSE - Liberación Descontrolada de EnergíajcastroroblesPas encore d'évaluation
- Cap 3 Flujo de Potencia OptimoDocument14 pagesCap 3 Flujo de Potencia OptimoPamela ColquePas encore d'évaluation
- Esquemas de ProyectoDocument10 pagesEsquemas de ProyectoCrv RuizPas encore d'évaluation
- La Ley de Resonancia PDFDocument96 pagesLa Ley de Resonancia PDFYamil Dib100% (2)
- Guia de Laboratorio #5, Trabajo y EnergiaDocument2 pagesGuia de Laboratorio #5, Trabajo y EnergiaJulian Pacheco DíazPas encore d'évaluation
- DinámicaDocument12 pagesDinámicaisaacnavargasgPas encore d'évaluation
- ELECTROTECNIA Clase Virtual 6 - Sandra HuamánDocument24 pagesELECTROTECNIA Clase Virtual 6 - Sandra Huamánjhon caceresPas encore d'évaluation
- Centrales HidroeléctricasDocument5 pagesCentrales HidroeléctricasLuis SaltaPas encore d'évaluation
- Hoja de VidaDocument25 pagesHoja de VidaNelson VacaPas encore d'évaluation
- Defensa DinamicaDocument4 pagesDefensa DinamicajuanPas encore d'évaluation
- Cambios PermanentesDocument8 pagesCambios PermanentesLalo SánchezPas encore d'évaluation