Vous aimerez peut-être aussi
- Documents Export Date: Search:: Terms and Conditions Privacy PolicyDocument18 pagesDocuments Export Date: Search:: Terms and Conditions Privacy PolicyChien Manh NguyenPas encore d'évaluation
- Card Son Duong Ha TinhDocument1 pageCard Son Duong Ha TinhChien Manh NguyenPas encore d'évaluation
- Chapter 0 SlidesDocument13 pagesChapter 0 SlidesSriramPas encore d'évaluation
- Subramani A K.CFD Calculation of S.mar.2000.JSRDocument24 pagesSubramani A K.CFD Calculation of S.mar.2000.JSRChien Manh NguyenPas encore d'évaluation
- MachiningCloud SelectingMillingToolsDocument33 pagesMachiningCloud SelectingMillingToolsChien Manh NguyenPas encore d'évaluation
- 2013 Calculator Modalshift Catalyst-MosDocument8 pages2013 Calculator Modalshift Catalyst-MosChien Manh NguyenPas encore d'évaluation
- CE397 Hydrodynamics of Propulsors Spring 2016Document1 pageCE397 Hydrodynamics of Propulsors Spring 2016Chien Manh NguyenPas encore d'évaluation
- Calculate ResistanceDocument5 pagesCalculate ResistanceSeyfullahYıldızPas encore d'évaluation
- Open Water Test Series of Modified AU-type Six Bladed Propeller Models of Area Ratio 0.85Document5 pagesOpen Water Test Series of Modified AU-type Six Bladed Propeller Models of Area Ratio 0.85Chien Manh Nguyen100% (1)
- Wageningene Series B Propeller MatlabDocument2 pagesWageningene Series B Propeller MatlabChien Manh NguyenPas encore d'évaluation
- Model2 Rev2 PDFDocument1 pageModel2 Rev2 PDFChien Manh NguyenPas encore d'évaluation
- Qprop: Propeller Design and Analysis Workflow SolutionsDocument2 pagesQprop: Propeller Design and Analysis Workflow SolutionsChien Manh NguyenPas encore d'évaluation
- Soton LR CFD 2016 Results Template v2 PDFDocument9 pagesSoton LR CFD 2016 Results Template v2 PDFChien Manh NguyenPas encore d'évaluation
- 488 Appendix A3: Tabulations of Resistance Design DataDocument3 pages488 Appendix A3: Tabulations of Resistance Design DataChien Manh NguyenPas encore d'évaluation
- Assignment1 SolutionDocument7 pagesAssignment1 SolutionChien Manh NguyenPas encore d'évaluation
- MachiningCloud SelectingMillingToolsDocument33 pagesMachiningCloud SelectingMillingToolsChien Manh NguyenPas encore d'évaluation
- Open Water Test Series of Modified AU-type Six Bladed Propeller Models of Area Ratio 0.85Document5 pagesOpen Water Test Series of Modified AU-type Six Bladed Propeller Models of Area Ratio 0.85Chien Manh Nguyen100% (1)
- On The Development of A New-Series Propeller For High-Speed CraftsDocument9 pagesOn The Development of A New-Series Propeller For High-Speed CraftsChien Manh NguyenPas encore d'évaluation
- Syl Props 16Document4 pagesSyl Props 16Chien Manh NguyenPas encore d'évaluation
- Subramani A K.CFD Calculation of S.mar.2000.JSRDocument24 pagesSubramani A K.CFD Calculation of S.mar.2000.JSRChien Manh NguyenPas encore d'évaluation
- CPP Series for Off-Design PerformanceDocument19 pagesCPP Series for Off-Design PerformanceldigasPas encore d'évaluation
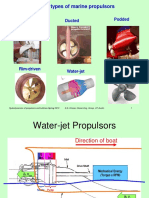
- Some Types of Marine Propulsors: Contra-Rotating Ducted PoddedDocument4 pagesSome Types of Marine Propulsors: Contra-Rotating Ducted PoddedChien Manh NguyenPas encore d'évaluation
- EER4 Notes PDFDocument6 pagesEER4 Notes PDFChien Manh NguyenPas encore d'évaluation
- Leif Broberg FlowtechDocument31 pagesLeif Broberg FlowtechChien Manh NguyenPas encore d'évaluation
- Model2 Rev2Document1 pageModel2 Rev2Chien Manh NguyenPas encore d'évaluation
- Four Bar Linkages.: H A A BDocument4 pagesFour Bar Linkages.: H A A BRikuo Nura HayashitaPas encore d'évaluation
- ShipHydroLN 6Document19 pagesShipHydroLN 6SeyfullahYıldızPas encore d'évaluation
- R/R 0.7 D 3.5 N 240 RPM H 4 PV 1615 Pa Rho 1025.9 kg/m3 Patm Pa Sigmax 1.27Document1 pageR/R 0.7 D 3.5 N 240 RPM H 4 PV 1615 Pa Rho 1025.9 kg/m3 Patm Pa Sigmax 1.27Chien Manh NguyenPas encore d'évaluation
- Watch 5Document1 pageWatch 5Chien Manh NguyenPas encore d'évaluation
- Floor DrawingDocument1 pageFloor DrawingChien Manh NguyenPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Strain Gage-WhatDocument16 pagesStrain Gage-WhatAshok JoshiPas encore d'évaluation
- Industrial Hose Products - DAYCODocument200 pagesIndustrial Hose Products - DAYCOHebert CcahuanaPas encore d'évaluation
- Local buckling classificationDocument10 pagesLocal buckling classificationHaya BakerPas encore d'évaluation
- Geotech Final ReportDocument38 pagesGeotech Final Reportapi-320590292Pas encore d'évaluation
- Projection Achievement ReportDocument8 pagesProjection Achievement ReportPskaruppiah KarupsPas encore d'évaluation
- Defense Acquisition GuidebookDocument927 pagesDefense Acquisition GuidebookJudkerrPas encore d'évaluation
- Environmental Engineering - Civil Engineering - McGill UniversityDocument4 pagesEnvironmental Engineering - Civil Engineering - McGill Universityamrin jannatPas encore d'évaluation
- Calpeda Pump DatasheetDocument16 pagesCalpeda Pump DatasheetAhamed HussanPas encore d'évaluation
- How Objects Are Discovered and Monitored in Operations ManagerDocument2 pagesHow Objects Are Discovered and Monitored in Operations ManagerAkhilesh NandanwarPas encore d'évaluation
- Building A Big Data Platform For Smart Cities: Experience and Lessons From SantanderDocument8 pagesBuilding A Big Data Platform For Smart Cities: Experience and Lessons From SantanderDylan GuedesPas encore d'évaluation
- Andrews General Usability HeuristicsDocument1 pageAndrews General Usability HeuristicsGhaniPas encore d'évaluation
- Part - I (MCQ) (Compulsory) : M A A ADocument4 pagesPart - I (MCQ) (Compulsory) : M A A AAfzaal GhaziPas encore d'évaluation
- Singly Linked Lists AlgorithmDocument18 pagesSingly Linked Lists AlgorithmGSX-R 1100Pas encore d'évaluation
- TumblerBook Web enDocument21 pagesTumblerBook Web enbmj272Pas encore d'évaluation
- Planning - THERM - Timber - H-I - H-V - 2016 (RAICO)Document542 pagesPlanning - THERM - Timber - H-I - H-V - 2016 (RAICO)AnrStukPas encore d'évaluation
- 7216Document8 pages7216siicmorelosPas encore d'évaluation
- SiliconeSurfactants SILTECHDocument6 pagesSiliconeSurfactants SILTECHA MahmoodPas encore d'évaluation
- Trouble ShootingDocument3 pagesTrouble Shootingsami4330Pas encore d'évaluation
- Lecture 04 Critical Path Method (CPM) PDFDocument25 pagesLecture 04 Critical Path Method (CPM) PDFAmira HachemPas encore d'évaluation
- Spec Oem National 300qDocument2 pagesSpec Oem National 300qJose Javier GamaPas encore d'évaluation
- Diamond DA 42 Systems - V12 - 5clases 19 de JunioDocument402 pagesDiamond DA 42 Systems - V12 - 5clases 19 de JunioLiu Antonio Tang100% (1)
- Turbo Machines and Propulsion Exam Questions on Pumps, Turbines, Pipe FlowDocument3 pagesTurbo Machines and Propulsion Exam Questions on Pumps, Turbines, Pipe FlowAdams100% (1)
- Supports For Pipelines 1758uk 7-03-15 PDFDocument46 pagesSupports For Pipelines 1758uk 7-03-15 PDFAndor MolitoriszPas encore d'évaluation
- Compressed Air SystemDocument372 pagesCompressed Air SystemMauricioPas encore d'évaluation
- Drum Unloading SystemDocument2 pagesDrum Unloading SystemJas SumPas encore d'évaluation
- PE - EXAM GUIDE Signalization WarrantsDocument12 pagesPE - EXAM GUIDE Signalization WarrantsRoberto CatalaniPas encore d'évaluation
- 12V-84Ah lithium-ion battery pack specificationsDocument2 pages12V-84Ah lithium-ion battery pack specificationsramshukla2001Pas encore d'évaluation
- High Precision Ball Bearings SolutionsDocument71 pagesHigh Precision Ball Bearings SolutionsTravis DavisPas encore d'évaluation
- Efecto de La Temperatura Del Hipoclorito de SodioDocument4 pagesEfecto de La Temperatura Del Hipoclorito de SodioMarriano DarinoPas encore d'évaluation
- Louie Langas Resume 2019Document1 pageLouie Langas Resume 2019Louie LangasPas encore d'évaluation