Vous aimerez peut-être aussi
- S PMT Best Practice GuideDocument29 pagesS PMT Best Practice Guidejuriesk100% (1)
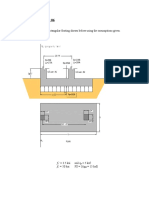
- Combined Footings 06: Design The Combined Rectangular Footing Shown Below Using The Assumptions GivenDocument6 pagesCombined Footings 06: Design The Combined Rectangular Footing Shown Below Using The Assumptions GivenjurieskPas encore d'évaluation
- Stab CalcDocument4 pagesStab CalcjurieskPas encore d'évaluation
- H-L Series Crane Dimensional Data Sheet: ContactDocument3 pagesH-L Series Crane Dimensional Data Sheet: ContactjurieskPas encore d'évaluation
- F Ksi F Ksi Q KSF: Combined Footing - 01Document7 pagesF Ksi F Ksi Q KSF: Combined Footing - 01jurieskPas encore d'évaluation
- Fencing Spec...Document3 pagesFencing Spec...jurieskPas encore d'évaluation
- Pilecap Mesh Specifications - : BRC Asia Limited. All Rights ReservedDocument2 pagesPilecap Mesh Specifications - : BRC Asia Limited. All Rights ReservedjurieskPas encore d'évaluation
- SRD Stevens ExampleDocument9 pagesSRD Stevens Examplejuriesk100% (1)
- Pile Driving Record (Blow Count Record)Document3 pagesPile Driving Record (Blow Count Record)jurieskPas encore d'évaluation
- Prefabricated Column Reinforcement SpecificationsDocument2 pagesPrefabricated Column Reinforcement SpecificationsjurieskPas encore d'évaluation
- EN1002 Steel GradeDocument1 pageEN1002 Steel GradejurieskPas encore d'évaluation
- Menck MHU - New BrochureDocument4 pagesMenck MHU - New BrochurejurieskPas encore d'évaluation
- Pile Driveability Analysis Check List Rev.cDocument1 pagePile Driveability Analysis Check List Rev.cjuriesk100% (1)
- Hammer Data Sheet - Rev.iDocument13 pagesHammer Data Sheet - Rev.ijurieskPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Brochure Jekko 12MGDocument21 pagesBrochure Jekko 12MGJosé Bayonas MartínezPas encore d'évaluation
- MycompressibilityDocument1 pageMycompressibilityodunolaakimuPas encore d'évaluation
- An Experimental Study of Oil-Water Flows in HorizontalDocument15 pagesAn Experimental Study of Oil-Water Flows in HorizontalHomam MohammadPas encore d'évaluation
- 1500 Animated Mechanical MechanismsDocument121 pages1500 Animated Mechanical MechanismsFaruk GunacanPas encore d'évaluation
- The Coefficient of Earth Pressure at Rest: Canadian Geotechnical Journal January 2011Document21 pagesThe Coefficient of Earth Pressure at Rest: Canadian Geotechnical Journal January 2011Adefi AbiogaPas encore d'évaluation
- Development and Performance of A Sugar CentrifugeDocument6 pagesDevelopment and Performance of A Sugar CentrifugeJuan MendozaPas encore d'évaluation
- Analysis of FramesDocument13 pagesAnalysis of FramesAdam JoshuaPas encore d'évaluation
- Geas Coaching 1Document3 pagesGeas Coaching 1Aaron Joseph SolanoPas encore d'évaluation
- Fluid Mechanics Sessional CE 262Document28 pagesFluid Mechanics Sessional CE 262মোঃমেহেদী হাসান শরীফPas encore d'évaluation
- R. C. Batra - On The Coincidence of The Principal Axes of Stress and Strain in Isotropic Elastic BodiesDocument5 pagesR. C. Batra - On The Coincidence of The Principal Axes of Stress and Strain in Isotropic Elastic BodiesCola7890Pas encore d'évaluation
- CE124 FInals Exam Problem SolvingDocument1 pageCE124 FInals Exam Problem SolvingZENRIRPas encore d'évaluation
- Improving The Efficiency of A Savonius Vertical Axis Wind Turbine Using An PDFDocument6 pagesImproving The Efficiency of A Savonius Vertical Axis Wind Turbine Using An PDFأحمد إبراهيم شواربPas encore d'évaluation
- International Physics Olympiads 1967-2010Document1 309 pagesInternational Physics Olympiads 1967-2010Ansh Shukla94% (16)
- Proposal ContentDocument3 pagesProposal ContentHemantkumar HadolePas encore d'évaluation
- Modulus NewDocument35 pagesModulus NewSanaullah BalochPas encore d'évaluation
- Mat Foundations (Part B) : DR Nor Faizah BawadiDocument20 pagesMat Foundations (Part B) : DR Nor Faizah Bawadiabas ibrahimPas encore d'évaluation
- Munson, Young and Okiishi's Fundamentals of Fluid Mechanics, 8th Edition (2016) - Book ReviewDocument7 pagesMunson, Young and Okiishi's Fundamentals of Fluid Mechanics, 8th Edition (2016) - Book ReviewCristian De Jesus Nuñez GarciaPas encore d'évaluation
- GME Question PapersDocument5 pagesGME Question PapersAmit Singh80% (20)
- Chapter 2 Structural Design LoadsDocument3 pagesChapter 2 Structural Design LoadsAhmedTahaPas encore d'évaluation
- Farra Alliyah Binti Mohd Faizul - As1201b - Phy110 Lab Report 1Document11 pagesFarra Alliyah Binti Mohd Faizul - As1201b - Phy110 Lab Report 1farraalliyahPas encore d'évaluation
- Soil Constitutive Models and Their Application in Geotechnical Engineering A Review IJERTV7IS040129 PDFDocument9 pagesSoil Constitutive Models and Their Application in Geotechnical Engineering A Review IJERTV7IS040129 PDFgamidi67Pas encore d'évaluation
- Induced DragDocument23 pagesInduced DragkmssaileshPas encore d'évaluation
- Arnold Verruijt-Computational Geomechanics (1999) PDFDocument212 pagesArnold Verruijt-Computational Geomechanics (1999) PDFد.م. محمد الطاهرPas encore d'évaluation
- Physics Inertial ForceDocument7 pagesPhysics Inertial ForceInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Procedures To Design A Sieve Tray TowerDocument14 pagesProcedures To Design A Sieve Tray TowerSaidPas encore d'évaluation
- Physics SSC-I - (3rd Set)Document6 pagesPhysics SSC-I - (3rd Set)misshi khanPas encore d'évaluation
- 3-1-Unit IIDocument40 pages3-1-Unit IIGroup-4 CommonPas encore d'évaluation
- Thermodynamics SummaryDocument1 pageThermodynamics SummaryHumberto GilmerPas encore d'évaluation
- Properties of Fluid - PYQ 01Document8 pagesProperties of Fluid - PYQ 01GULAM GAUS QADRIPas encore d'évaluation
- GP1 - Q1 - Week 6Document6 pagesGP1 - Q1 - Week 6Sathya CruzPas encore d'évaluation