Vous aimerez peut-être aussi
- IpaliasingDocument5 pagesIpaliasingAriel ManzanoPas encore d'évaluation
- Informe Bombas en Serie y ParaleloDocument2 pagesInforme Bombas en Serie y ParaleloAriel ManzanoPas encore d'évaluation
- Luis Yulán Teoria SituacionalDocument4 pagesLuis Yulán Teoria SituacionalAriel ManzanoPas encore d'évaluation
- CODIFICACIÓN Y TV en EcuadorDocument3 pagesCODIFICACIÓN Y TV en EcuadorAriel ManzanoPas encore d'évaluation
- Calculo de Parametros Del Enlace Utilizando El Software LSTDocument7 pagesCalculo de Parametros Del Enlace Utilizando El Software LSTAriel ManzanoPas encore d'évaluation
- Informe # 3 Instrumentacion y Ley de OhmDocument13 pagesInforme # 3 Instrumentacion y Ley de OhmEmmanuel Abt67% (3)
- Laboratorio II MEDocument2 pagesLaboratorio II MEJorge HB50% (2)
- XNX DS01078 V4 0213 Es PDFDocument12 pagesXNX DS01078 V4 0213 Es PDFJosé Carlos SaavedraPas encore d'évaluation
- 1735 User ManualDocument66 pages1735 User ManualRey Gussy100% (1)
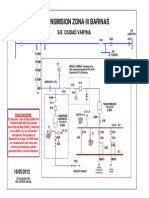
- Diagrama Unifilar Subestaciones Ciudad Varyna 23-05-12Document1 pageDiagrama Unifilar Subestaciones Ciudad Varyna 23-05-12Francisco OviedoPas encore d'évaluation
- Compresor de Tornillo PDFDocument69 pagesCompresor de Tornillo PDFchicoedy100% (1)
- Clima 8000Document4 pagesClima 8000AutoclimMadridPas encore d'évaluation
- Filtros de Sistemas y SeñalesDocument15 pagesFiltros de Sistemas y SeñalesMiguel AlejandroPas encore d'évaluation
- Instalar Entrada Auxiliar Utilizando Las Viejas CaseterasDocument16 pagesInstalar Entrada Auxiliar Utilizando Las Viejas CaseterasEnrique FlowersPas encore d'évaluation
- 6.11 y 6.12 Maquinas ElectricasDocument3 pages6.11 y 6.12 Maquinas ElectricasJhovany Hernandez RosalesPas encore d'évaluation
- Capitulo IDocument7 pagesCapitulo Irealvaradog4831Pas encore d'évaluation
- Examen Sargento Conductor Madrid 2017Document14 pagesExamen Sargento Conductor Madrid 2017Enrique MartínezPas encore d'évaluation
- Lista DistrilandDocument151 pagesLista DistrilandGastón GenaisirPas encore d'évaluation
- ETG-A.1.01 Mod.1 231213 Criterio Diseño SubestacionesDocument54 pagesETG-A.1.01 Mod.1 231213 Criterio Diseño Subestacioneskavani5100% (1)
- Clase 7 - CONTROLDocument31 pagesClase 7 - CONTROLJose Luis Rosario SalvadorPas encore d'évaluation
- Antenas Monopolo y DipoloDocument26 pagesAntenas Monopolo y DipoloRolf Dardo Llampa GomezPas encore d'évaluation
- 21 Seguridad IntrinsecaDocument26 pages21 Seguridad IntrinsecaJosePas encore d'évaluation
- Manual en Español de Operación de La Cámara de Video Sony PMW 350Document198 pagesManual en Español de Operación de La Cámara de Video Sony PMW 350macpatorPas encore d'évaluation
- PlasmaDocument6 pagesPlasmaAugusto AtanacioPas encore d'évaluation
- Jaula de Faraday-RecomendaciónDocument1 pageJaula de Faraday-RecomendaciónedwinPas encore d'évaluation
- Hojas de Problem As Qui MicaDocument18 pagesHojas de Problem As Qui MicaClara AlvarezPas encore d'évaluation
- Listado de Bornes - Maclar, Electra, Acelco, Quaglia, Codigos de Relays Maclar y QuagliaDocument1 pageListado de Bornes - Maclar, Electra, Acelco, Quaglia, Codigos de Relays Maclar y QuagliaLeonel GrimardiPas encore d'évaluation
- PrimerDeberDE23 10 2019Document5 pagesPrimerDeberDE23 10 2019Ezequiel VelowssPas encore d'évaluation
- Sniper SpanishDocument2 pagesSniper SpanishRichard De La PeñaPas encore d'évaluation
- SO MultiprocesadorDocument34 pagesSO MultiprocesadorGabino Arel FernandezPas encore d'évaluation
- 2.1 Sensores y TransmisoresDocument17 pages2.1 Sensores y TransmisoresErwinPas encore d'évaluation
- Laboratorio 5 FinalDocument5 pagesLaboratorio 5 FinalJc AviPas encore d'évaluation
- Manual de TecladoDocument4 pagesManual de TecladoFanny Inlago100% (2)
- Xdvd236bt SPDocument28 pagesXdvd236bt SPRicardo Acevedo GarcíaPas encore d'évaluation
- Relaciones Escalares y Complejas en Circuitos Electricos LinealesDocument10 pagesRelaciones Escalares y Complejas en Circuitos Electricos LinealesJhon Alex López SotoPas encore d'évaluation