Vous aimerez peut-être aussi
- Exam Robotique 09Document1 pageExam Robotique 09org 2019Pas encore d'évaluation
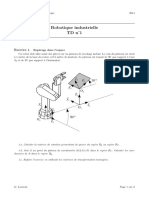
- TD Robotique 1Document2 pagesTD Robotique 1Mehdi Laser100% (3)
- Exam Robotique 03Document2 pagesExam Robotique 03Jaouad ElfathPas encore d'évaluation
- Sujet1 Robotique AitlahcenDocument4 pagesSujet1 Robotique AitlahcenCaptain Teddy BearPas encore d'évaluation
- Exam ROBO012Document1 pageExam ROBO012Fleur D'espoirPas encore d'évaluation
- Exam Robotique 07Document2 pagesExam Robotique 07khadija lamrabetPas encore d'évaluation
- Exam Robotique 10 PDFDocument2 pagesExam Robotique 10 PDFImed BarçaPas encore d'évaluation
- Exam Robotique 05Document2 pagesExam Robotique 05Jaouad Elfath0% (1)
- Examen Elec 4 GSE 2011 RobotiqueDocument2 pagesExamen Elec 4 GSE 2011 RobotiqueMohamed Oulad Chaikh100% (1)
- TD 2 Robotique 2021-2022Document3 pagesTD 2 Robotique 2021-2022mina boucPas encore d'évaluation
- Examen RobotiqueDocument2 pagesExamen RobotiqueAbdelhamid Mazouzi67% (3)
- TD Dynamique en RobotiqueDocument4 pagesTD Dynamique en RobotiqueOmar 95Pas encore d'évaluation
- 2010 2011 Solution TP 2 PDFDocument2 pages2010 2011 Solution TP 2 PDFspeedov73Pas encore d'évaluation
- Correction TD 2 Robotique 2021-2022 BisDocument12 pagesCorrection TD 2 Robotique 2021-2022 Bismina bouc100% (2)
- Exam Robotique 13 PDFDocument2 pagesExam Robotique 13 PDFMehdi LaserPas encore d'évaluation
- TD 1Document3 pagesTD 1Khalid Ahyeoud100% (1)
- TD Chapitre 3 Modifier CinématiqueDocument1 pageTD Chapitre 3 Modifier Cinématiqueali18abidPas encore d'évaluation
- TD 3 Robotique 2021-2022Document3 pagesTD 3 Robotique 2021-2022mina boucPas encore d'évaluation
- TP Robotique licEEADocument3 pagesTP Robotique licEEASi Mohamed RahiliPas encore d'évaluation
- Corrige CC1 Robotique - 2015Document7 pagesCorrige CC1 Robotique - 2015Mohamed Oulad Chaikh100% (1)
- TD Robotique Aiac 2020 2021Document8 pagesTD Robotique Aiac 2020 2021Captain Teddy BearPas encore d'évaluation
- Exercice Robotique PDFDocument2 pagesExercice Robotique PDFRobert75% (4)
- Examen de Robotique Master II CSM 2015Document2 pagesExamen de Robotique Master II CSM 2015Mohamed Oulad Chaikh100% (2)
- Résumé Avec Exercices - Robotique Industrielle 2021-Partie 01Document5 pagesRésumé Avec Exercices - Robotique Industrielle 2021-Partie 01FAWZI RONALDOPas encore d'évaluation
- Travaux Dirigés Robotique 1 2020Document4 pagesTravaux Dirigés Robotique 1 2020marwa hamdiPas encore d'évaluation
- RobInd TD2Document3 pagesRobInd TD2Hichem Hamdi100% (1)
- Exam2006 PDFDocument2 pagesExam2006 PDFspeedov73Pas encore d'évaluation
- Chapitre 2 TD Corrigés 1Document11 pagesChapitre 2 TD Corrigés 1rgtgui100% (1)
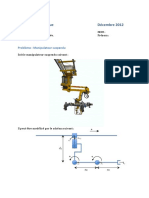
- PB Robotique 2Document2 pagesPB Robotique 2Willybrood FonckPas encore d'évaluation
- TD N°1 Robotique Industrielle 2021Document2 pagesTD N°1 Robotique Industrielle 2021Hocine BoukhiarPas encore d'évaluation
- Exam Robotique 13 PDFDocument2 pagesExam Robotique 13 PDFnasri imenPas encore d'évaluation
- 1 - Corrigé C #1 Du 31-03-2022Document6 pages1 - Corrigé C #1 Du 31-03-2022Hamza Miri0% (1)
- Corrigé Rattrapage Commande de Robot de Manipulation 2018Document3 pagesCorrigé Rattrapage Commande de Robot de Manipulation 2018zinebPas encore d'évaluation
- Khalil-Dombre Modelisation PDFDocument52 pagesKhalil-Dombre Modelisation PDFspeedov73100% (1)
- Corrigé Rattrapage Commande de Robot de Manipulation 2019Document2 pagesCorrigé Rattrapage Commande de Robot de Manipulation 2019zinebPas encore d'évaluation
- Corrigé Examen 2022Document4 pagesCorrigé Examen 2022Hamame Mohamed AminePas encore d'évaluation
- TP N°2 Modèle Géométrique D'un Robot ManipulateurDocument3 pagesTP N°2 Modèle Géométrique D'un Robot ManipulateurimenenouvellePas encore d'évaluation
- TD - Modèle DynamiqueDocument1 pageTD - Modèle Dynamiquehocine benmaizaPas encore d'évaluation
- Cours Robotique - Chap - CinematiqueDocument19 pagesCours Robotique - Chap - CinematiqueOmar 95Pas encore d'évaluation
- Examen de Robotique 2017-2018Document7 pagesExamen de Robotique 2017-2018Ahmad Qudymat100% (4)
- Cours de Robotique-V3-18-12-2018Document51 pagesCours de Robotique-V3-18-12-2018Omar 95Pas encore d'évaluation
- TP1 Sujet PDFDocument4 pagesTP1 Sujet PDFImed BarçaPas encore d'évaluation
- Chapitre 2Document17 pagesChapitre 2Oussama AbirPas encore d'évaluation
- Robotique TD2Document1 pageRobotique TD2bobzooPas encore d'évaluation
- Correction TD N°4 en RobotiqueDocument5 pagesCorrection TD N°4 en RobotiqueOmar 95100% (1)
- Modélisation GéométriqueDocument16 pagesModélisation GéométriqueAissa HadjoudjaPas encore d'évaluation
- Robotique3 PDFDocument13 pagesRobotique3 PDFjasen bornePas encore d'évaluation
- Bras A 4 AxesDocument2 pagesBras A 4 AxesMohamed NaciriPas encore d'évaluation
- Corrigé D'examen Commande de Robots de Manipulation 2017 - 2018Document3 pagesCorrigé D'examen Commande de Robots de Manipulation 2017 - 2018zineb100% (1)
- TD N 1 RobotiqueDocument2 pagesTD N 1 RobotiqueHoumita AbdelkaderPas encore d'évaluation
- 3 0 Systèmes Mécaniques Articulés Et RobotiqueDocument100 pages3 0 Systèmes Mécaniques Articulés Et RobotiqueredaPas encore d'évaluation
- Correction TD 3 Robotique 2021-2022Document9 pagesCorrection TD 3 Robotique 2021-2022mina boucPas encore d'évaluation
- Correction - EMD ROBOTIQUE 2020 BMS - Fabrication Mécanique Et Productique FMPDocument5 pagesCorrection - EMD ROBOTIQUE 2020 BMS - Fabrication Mécanique Et Productique FMPomarPas encore d'évaluation
- TD 2 - 2021Document2 pagesTD 2 - 2021hiba gribaPas encore d'évaluation
- RobInd TD1 PDFDocument2 pagesRobInd TD1 PDFUriel Nguefack100% (1)
- Exam Robotique 08Document2 pagesExam Robotique 08Iman AllouchPas encore d'évaluation
- Atomistique Partie 2Document44 pagesAtomistique Partie 2khatibPas encore d'évaluation
- TD1 2020Document2 pagesTD1 2020Lamyae ChPas encore d'évaluation
- TD Phys Ato MolDocument9 pagesTD Phys Ato MolTrandafir LacramioaraPas encore d'évaluation
- Ex SI2014 FRDocument8 pagesEx SI2014 FRloriedonfack965Pas encore d'évaluation
- Projet Malaquin-Deguillage PDFDocument50 pagesProjet Malaquin-Deguillage PDFJaouad ElfathPas encore d'évaluation
- Cours Bilan Thermique LP MIE EtudiantDocument17 pagesCours Bilan Thermique LP MIE EtudiantEffet PàpillonPas encore d'évaluation
- 00 IntroDocument18 pages00 IntroLuc Mutombo MukuluPas encore d'évaluation
- Projet - SFlash - VF 1233Document4 pagesProjet - SFlash - VF 1233Jaouad ElfathPas encore d'évaluation
- Notions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Document140 pagesNotions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Salma Brb83% (6)
- Cours Bilan Thermique LP MIE EtudiantDocument17 pagesCours Bilan Thermique LP MIE EtudiantEffet PàpillonPas encore d'évaluation
- Compagnie Franco Tunisienne PDFDocument108 pagesCompagnie Franco Tunisienne PDFJaouad ElfathPas encore d'évaluation
- Secheurs Air Par Adsorption Gammes CD AD BD PDFDocument12 pagesSecheurs Air Par Adsorption Gammes CD AD BD PDFJaouad ElfathPas encore d'évaluation
- Analyse Fonctionnel Complet PubDocument20 pagesAnalyse Fonctionnel Complet PubTheo DabrowskiPas encore d'évaluation
- Cahier Technique VP VAMEIN Serie 37-xxx PDFDocument83 pagesCahier Technique VP VAMEIN Serie 37-xxx PDFJaouad ElfathPas encore d'évaluation
- Aciers-Aciers de construction-S235JR-S355J0 PDFDocument3 pagesAciers-Aciers de construction-S235JR-S355J0 PDFJaouad ElfathPas encore d'évaluation
- Le Soudage Le Visuel PDFDocument13 pagesLe Soudage Le Visuel PDFslimamri100% (2)
- CDET - E - Généralités Codap - V1Document19 pagesCDET - E - Généralités Codap - V1alassanePas encore d'évaluation
- Mémoire PFE - Définitive PDFDocument53 pagesMémoire PFE - Définitive PDFJaouad ElfathPas encore d'évaluation
- 2a Hydrostatique PDFDocument14 pages2a Hydrostatique PDFabderrahimn100% (1)
- Énergétique Du BatimentDocument223 pagesÉnergétique Du Batimentbaccar_ichraf238892% (12)
- Exam Robotique 05Document2 pagesExam Robotique 05Jaouad Elfath0% (1)
- Cours AjustementsDocument6 pagesCours Ajustementsabder2222Pas encore d'évaluation
- Documentation Raccords Et Coudes PDFDocument332 pagesDocumentation Raccords Et Coudes PDFLionel NoguéPas encore d'évaluation
- Équipe 5SDocument1 pageÉquipe 5SJaouad ElfathPas encore d'évaluation
- Apprenez A Utiliser SolidworksDocument257 pagesApprenez A Utiliser SolidworksBcd Cde0% (1)
- Cours-Programmation C Pour Systèmes Embarqués-InternetDocument49 pagesCours-Programmation C Pour Systèmes Embarqués-InternetOmar KhayyamPas encore d'évaluation