Vous aimerez peut-être aussi
- Enhancing the Human Experience - Strategic Insights into Augmentation and BeyondD'EverandEnhancing the Human Experience - Strategic Insights into Augmentation and BeyondPas encore d'évaluation
- Social Robotics and the Good Life: The Normative Side of Forming Emotional Bonds With RobotsD'EverandSocial Robotics and the Good Life: The Normative Side of Forming Emotional Bonds With RobotsJanina LohPas encore d'évaluation
- Broekens Heerink Rosendal 2009Document11 pagesBroekens Heerink Rosendal 2009Ειρήνη ΔεμίρηPas encore d'évaluation
- Assistive Social Robots in Elderly Care: A ReviewDocument10 pagesAssistive Social Robots in Elderly Care: A ReviewShane ConneelyPas encore d'évaluation
- Trust in and Ethical Design of Carebots: The Case For Ethics of CareDocument17 pagesTrust in and Ethical Design of Carebots: The Case For Ethics of CareLucas CardiellPas encore d'évaluation
- Technologies: A Survey of Robots in HealthcareDocument26 pagesTechnologies: A Survey of Robots in Healthcareanilsai kodePas encore d'évaluation
- A Systematic Review of Robotic Rehabilitation For Cognitive TrainingDocument24 pagesA Systematic Review of Robotic Rehabilitation For Cognitive TrainingTaciany SantosPas encore d'évaluation
- Research On The Future of Assistive Technology For People With Locomotive Disabilities 2Document6 pagesResearch On The Future of Assistive Technology For People With Locomotive Disabilities 2rikaseo rikaPas encore d'évaluation
- A Review On The Use of Socially Assistive Robots in Education and Elderly CareDocument3 pagesA Review On The Use of Socially Assistive Robots in Education and Elderly CarePaulo KussPas encore d'évaluation
- Socially Assistive Robots in Elderly Care A Mixed-Method Systematic Literature ReviewDocument8 pagesSocially Assistive Robots in Elderly Care A Mixed-Method Systematic Literature ReviewaflsigakfPas encore d'évaluation
- Salic Hs 2018Document4 pagesSalic Hs 2018Viviane AbreuPas encore d'évaluation
- Feasibility Study of A Socially Assistive HumanoidDocument16 pagesFeasibility Study of A Socially Assistive HumanoidDebbie Jeinnisse Alvarez CrucesPas encore d'évaluation
- Therapeutic Robots For Older Adults:: Investigating The Potential of ParoDocument2 pagesTherapeutic Robots For Older Adults:: Investigating The Potential of ParoLeo OrmazaPas encore d'évaluation
- Robotic Assistive Technology Augmenting Dementia Care Technology Design and Preliminary AcceptabilityDocument5 pagesRobotic Assistive Technology Augmenting Dementia Care Technology Design and Preliminary AcceptabilityHerald Scholarly Open AccessPas encore d'évaluation
- Ethical Sideof Care Robots 2Document14 pagesEthical Sideof Care Robots 2Noor SultanPas encore d'évaluation
- Coghlan Robots and The Possiblity of Humanistic CareDocument14 pagesCoghlan Robots and The Possiblity of Humanistic CareAlex WangPas encore d'évaluation
- STS Topic 6Document34 pagesSTS Topic 6Allyssa Leila Estrebillo OrbePas encore d'évaluation
- Interacting With Computers: Natalia Romero, Janienke Sturm, Tilde Bekker, Linda de Valk, Sander KruitwagenDocument11 pagesInteracting With Computers: Natalia Romero, Janienke Sturm, Tilde Bekker, Linda de Valk, Sander KruitwagenGuadalupe MadrigalPas encore d'évaluation
- Robot Therapy For Elders Affected by Dementia: Using Personal Robots For Pleasure and RelaxationDocument8 pagesRobot Therapy For Elders Affected by Dementia: Using Personal Robots For Pleasure and RelaxationBhushan ShinkrePas encore d'évaluation
- Mitziguevara RobotsDocument6 pagesMitziguevara Robotsapi-541664570Pas encore d'évaluation
- How To Implement Robots in Interventions For Children With Autism? A Co-Creation Study Involving People With Autism, Parents and ProfessionalsDocument18 pagesHow To Implement Robots in Interventions For Children With Autism? A Co-Creation Study Involving People With Autism, Parents and ProfessionalsgemaPas encore d'évaluation
- Robots TeleoperadosDocument7 pagesRobots TeleoperadosDanilo Carvajal MarinPas encore d'évaluation
- PDF 1Document15 pagesPDF 1Aglaya Jhoselin Urquieta VelezPas encore d'évaluation
- Ethical and Social Dimensions of Science and TechnologyDocument5 pagesEthical and Social Dimensions of Science and TechnologyNathan TanPas encore d'évaluation
- Robotics Social RobotDocument5 pagesRobotics Social RobotIJRASETPublicationsPas encore d'évaluation
- The Role of Social Workers in Social Rehabilitation Services at BinaNetraWytaGuna Social HouseDocument8 pagesThe Role of Social Workers in Social Rehabilitation Services at BinaNetraWytaGuna Social HouseInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- FASCICLE III, 2016, VOL. 39, NO. 2, ISSN 2344-4738, ISSN-L 1221-454X Electrotechnics, Electronics, Automatic Control, InformaticsDocument4 pagesFASCICLE III, 2016, VOL. 39, NO. 2, ISSN 2344-4738, ISSN-L 1221-454X Electrotechnics, Electronics, Automatic Control, InformaticsIoan SusneaPas encore d'évaluation
- A Survey On Ambient-Assisted Living Tools For Older AdultsDocument12 pagesA Survey On Ambient-Assisted Living Tools For Older AdultsOnur Ozdemir0% (1)
- Lower Limb Rehabilitation Robotics: The Current Understanding and TechnologyDocument19 pagesLower Limb Rehabilitation Robotics: The Current Understanding and Technologyalamin khondakerPas encore d'évaluation
- Impact of Digital Media On Sleep Pattern Disturbance in Medical and Nursing StudentsDocument7 pagesImpact of Digital Media On Sleep Pattern Disturbance in Medical and Nursing StudentsValarmathiPas encore d'évaluation
- Ontology-Based Deep Learning For Human Behavior Prediction in Health Social NetworksDocument10 pagesOntology-Based Deep Learning For Human Behavior Prediction in Health Social NetworksSAMUELPas encore d'évaluation
- Maha Razzak Ar 016Document66 pagesMaha Razzak Ar 016Adnan DurraniPas encore d'évaluation
- Investment FormatDocument5 pagesInvestment FormatShirsho GhoshPas encore d'évaluation
- AI in Medicine - Physical BranchDocument1 pageAI in Medicine - Physical BranchGabriela StanciulescuPas encore d'évaluation
- Kurian Toddlers and RobotsDocument14 pagesKurian Toddlers and Robotsyuan09ieePas encore d'évaluation
- 10 18863-Pgy 1242958-2919777Document15 pages10 18863-Pgy 1242958-2919777dasde87Pas encore d'évaluation
- DISABILITY AND DEVELOPMENT Robert Metts PDFDocument45 pagesDISABILITY AND DEVELOPMENT Robert Metts PDFNafis Hasan khanPas encore d'évaluation
- Robot Dementia Therapy ProgramDocument18 pagesRobot Dementia Therapy ProgramWilliam VenegasPas encore d'évaluation
- Practice Paper UK 1Document3 pagesPractice Paper UK 1Albert MarreddyPas encore d'évaluation
- Chapter - 1Document55 pagesChapter - 1Rajeev JhaPas encore d'évaluation
- Research Final Submission 21.07.18Document38 pagesResearch Final Submission 21.07.18Ian Kristopher BayanPas encore d'évaluation
- Problems and Solutions For Disabled Persons in NatureDocument4 pagesProblems and Solutions For Disabled Persons in NatureDang AlexPas encore d'évaluation
- Identification and Differentiated Services 2Document7 pagesIdentification and Differentiated Services 2mebrahtom100% (1)
- Theoretizing The Models of Disability Philosophical Social and Medical Concepts-An Empirical Research Based On Existing LiteratureDocument7 pagesTheoretizing The Models of Disability Philosophical Social and Medical Concepts-An Empirical Research Based On Existing LiteratureJohn DavidPas encore d'évaluation
- Xiv International Congress On Project Engineering Equipamiento para La Discapacidad: Propuesta de Un Bipedestador Eléctrico InfantilDocument13 pagesXiv International Congress On Project Engineering Equipamiento para La Discapacidad: Propuesta de Un Bipedestador Eléctrico InfantilhjkPas encore d'évaluation
- Bilodeau & Potvin (2018)Document9 pagesBilodeau & Potvin (2018)NimPas encore d'évaluation
- Tutorial Questions Semester II 2018Document2 pagesTutorial Questions Semester II 2018Leanna PargassPas encore d'évaluation
- Technological Gadgets: It Really Affects To Health and Lifestyle?Document6 pagesTechnological Gadgets: It Really Affects To Health and Lifestyle?ShiellaMaeCalvesPas encore d'évaluation
- Expert Systems With Applications: Pau Climent-Pérez, Susanna Spinsante, Alex Mihailidis, Francisco Florez-RevueltaDocument19 pagesExpert Systems With Applications: Pau Climent-Pérez, Susanna Spinsante, Alex Mihailidis, Francisco Florez-RevueltaAmel KsibiPas encore d'évaluation
- 08 Disability Care and The City by Julian WalkerDocument19 pages08 Disability Care and The City by Julian WalkerToni BlancoPas encore d'évaluation
- Political Research PAGCORDocument14 pagesPolitical Research PAGCORLawrence Gerald Lozada BerayPas encore d'évaluation
- BNNGGHDocument18 pagesBNNGGHGeede TaguinodPas encore d'évaluation
- Yan 2015Document17 pagesYan 2015Gabriel DelgadoPas encore d'évaluation
- Description: Tags: Nidrr-Lrp-99-03Document130 pagesDescription: Tags: Nidrr-Lrp-99-03anon-59432Pas encore d'évaluation
- Digital Business Individual Essay Session 9Document2 pagesDigital Business Individual Essay Session 9Bernard BrinkelPas encore d'évaluation
- FINNIPS Online Entrance ExaminationDocument4 pagesFINNIPS Online Entrance ExaminationGerman Language SchoolPas encore d'évaluation
- COMRADE: Intelligent Microcontroller Based Robotic Dog For Elders Using IOTDocument19 pagesCOMRADE: Intelligent Microcontroller Based Robotic Dog For Elders Using IOTvincentPas encore d'évaluation
- Human Factors Considerations For Quantifiable Human State in Physical Human-Robot Interaction - A Literature ReviewDocument33 pagesHuman Factors Considerations For Quantifiable Human State in Physical Human-Robot Interaction - A Literature ReviewPiyumal SamarathungaPas encore d'évaluation
- Impact of Gadgets On Emotional Maturity, Reasoning Ability of College StudentsDocument7 pagesImpact of Gadgets On Emotional Maturity, Reasoning Ability of College StudentsErlin FatinahPas encore d'évaluation
- The Fulatune Hardiness Handbook: Grow More Worldly-wise, Attuned & ComposedD'EverandThe Fulatune Hardiness Handbook: Grow More Worldly-wise, Attuned & ComposedPas encore d'évaluation
- Cómo Me Quieres: Bass GuitarDocument5 pagesCómo Me Quieres: Bass GuitarjohnnyPas encore d'évaluation
- 150a 2020 Full SyllabusDocument13 pages150a 2020 Full SyllabusjohnnyPas encore d'évaluation
- Postwar Japan: Ghosts of ModernityDocument4 pagesPostwar Japan: Ghosts of Modernityjohnny100% (2)
- 2020 Middle East PoliticsDocument12 pages2020 Middle East PoliticsjohnnyPas encore d'évaluation
- Course Objectives: MENG 487/488 - Mechanical Design: Process and ImplementationDocument8 pagesCourse Objectives: MENG 487/488 - Mechanical Design: Process and ImplementationjohnnyPas encore d'évaluation
- New Doc 2019-10-22 22.00.15Document7 pagesNew Doc 2019-10-22 22.00.15johnnyPas encore d'évaluation
- BENG 434 2020 SyllabusDocument4 pagesBENG 434 2020 SyllabusjohnnyPas encore d'évaluation
- 10 Days To Faster Reading PDFDocument122 pages10 Days To Faster Reading PDFjohnny100% (12)
- Intermediate PPL Hypertrophy RoutineDocument2 pagesIntermediate PPL Hypertrophy RoutinejohnnyPas encore d'évaluation
- Financial Support Commitment For RelativesDocument1 pageFinancial Support Commitment For RelativesjohnnyPas encore d'évaluation
- Synedoche New York Requiem For A Dream American Beauty It's Kind of A Sunny Story Waking LifeDocument1 pageSynedoche New York Requiem For A Dream American Beauty It's Kind of A Sunny Story Waking LifejohnnyPas encore d'évaluation
- Extra Physics Rotational ProblemsDocument4 pagesExtra Physics Rotational ProblemsjohnnyPas encore d'évaluation
- Freshman Seminar ProgramDocument9 pagesFreshman Seminar ProgramjohnnyPas encore d'évaluation
- Extra WorkDocument2 pagesExtra WorkjohnnyPas encore d'évaluation
- SAT Math Problem Solving and Data Analysis Practice Test 3Document4 pagesSAT Math Problem Solving and Data Analysis Practice Test 3johnnyPas encore d'évaluation
- GurdjieffDocument4 pagesGurdjieffjohnnyPas encore d'évaluation
- Lay Planning TypesDocument1 pageLay Planning TypesGaurav Shakya100% (1)
- Task 3: New - HTMLDocument12 pagesTask 3: New - HTMLGONELA SAI LOKESH (RA2011028010100)Pas encore d'évaluation
- 陳v Endometrial Cancer 2Document48 pages陳v Endometrial Cancer 201范芷紜Pas encore d'évaluation
- Technology For Duck - Fish Integrated Farming System in GoaDocument4 pagesTechnology For Duck - Fish Integrated Farming System in GoagavinilaaPas encore d'évaluation
- Dr. N. Kumarappan IE (I) Council Candidate - Electrical DivisionDocument1 pageDr. N. Kumarappan IE (I) Council Candidate - Electrical Divisionshanmugasundaram32Pas encore d'évaluation
- Firststep To AlaskaDocument28 pagesFirststep To AlaskaBarbara NelsonPas encore d'évaluation
- GCGM PDFDocument11 pagesGCGM PDFMiguel Angel Martin100% (1)
- Peter Brandt InterviewDocument38 pagesPeter Brandt InterviewNishant P Kalaskar100% (1)
- Primefaces Users Guide 3 5cDocument497 pagesPrimefaces Users Guide 3 5calvarolucasPas encore d'évaluation
- Automatic Tools For High Availability in Postgresql: Camilo Andrés EcheverriDocument9 pagesAutomatic Tools For High Availability in Postgresql: Camilo Andrés EcheverriRegistro PersonalPas encore d'évaluation
- RG-RAP6260 (G) Hardware InstallationDocument26 pagesRG-RAP6260 (G) Hardware InstallationrazuetPas encore d'évaluation
- Pipetite: Pipetite Forms A Flexible, Sanitary Seal That Allows For Pipeline MovementDocument4 pagesPipetite: Pipetite Forms A Flexible, Sanitary Seal That Allows For Pipeline MovementAngela SeyerPas encore d'évaluation
- Different Art TechniquesDocument39 pagesDifferent Art TechniquesRommel LegaspiPas encore d'évaluation
- Bhagavatam English Chapter 10bDocument22 pagesBhagavatam English Chapter 10bsrimatsimhasaneshwarPas encore d'évaluation
- 8 3ThingWorxInstallation 1 0 174675 PDFDocument157 pages8 3ThingWorxInstallation 1 0 174675 PDFAuditio MandhanyPas encore d'évaluation
- 04 DosimetryDocument104 pages04 DosimetryEdmond ChiangPas encore d'évaluation
- PC2000-8 Spec SheetDocument20 pagesPC2000-8 Spec SheetNeeraj ChauhanPas encore d'évaluation
- AromatherapyDocument15 pagesAromatherapymurrmurrePas encore d'évaluation
- Bach Polonaise G Min BWV 119 A4Document1 pageBach Polonaise G Min BWV 119 A4vincenzovaiaPas encore d'évaluation
- Christine Remembered That Today Is The Birthday of Her BossDocument1 pageChristine Remembered That Today Is The Birthday of Her BossA.Pas encore d'évaluation
- Application of SPACE MatrixDocument11 pagesApplication of SPACE Matrixdecker444975% (4)
- REM630 Broch 756825 LRENdDocument6 pagesREM630 Broch 756825 LRENdsihamuPas encore d'évaluation
- To Tell The TruthDocument5 pagesTo Tell The TruthNabeel Ahmed KhanPas encore d'évaluation
- Lab 6 Data VisualizationDocument8 pagesLab 6 Data VisualizationRoaster GuruPas encore d'évaluation
- Factsheet AMRT 2023 01Document4 pagesFactsheet AMRT 2023 01arsyil1453Pas encore d'évaluation
- MODULE 1 - Contemporary WorldDocument4 pagesMODULE 1 - Contemporary WorldaapPas encore d'évaluation
- Zoology LAB Scheme of Work 2023 Hsslive HSSDocument7 pagesZoology LAB Scheme of Work 2023 Hsslive HSSspookyvibee666Pas encore d'évaluation
- Livro Spectrochemical AnalysisDocument9 pagesLivro Spectrochemical AnalysisRicardo PossebonPas encore d'évaluation
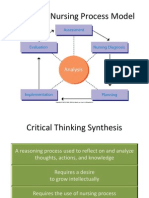
- NUR 104 Nursing Process MY NOTESDocument77 pagesNUR 104 Nursing Process MY NOTESmeanne073100% (1)
- Et Iso 12543 4 2011Document16 pagesEt Iso 12543 4 2011freddyguzman3471Pas encore d'évaluation