Vous aimerez peut-être aussi
- DC StrojeviDocument13 pagesDC StrojevialokinxxPas encore d'évaluation
- Elektroarbeiten sicher ausführen - Profiwissen für Heimwerker: Planung, Installation, MontageD'EverandElektroarbeiten sicher ausführen - Profiwissen für Heimwerker: Planung, Installation, MontageÉvaluation : 2 sur 5 étoiles2/5 (2)
- PhysikDocument38 pagesPhysikIch bin So coolPas encore d'évaluation
- Teslaspulen: Geschichte Und AufbauDocument9 pagesTeslaspulen: Geschichte Und Aufbaudotto2822Pas encore d'évaluation
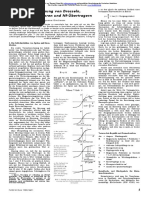
- Die Berechnung Von Drosseln, Netztransformatoren Und Nf-ÜbertragernDocument17 pagesDie Berechnung Von Drosseln, Netztransformatoren Und Nf-ÜbertragernGrigore Man100% (1)
- Leifi Physik - Elektromagnetische Induktion - 2014-12-15Document12 pagesLeifi Physik - Elektromagnetische Induktion - 2014-12-15Paul StefanovPas encore d'évaluation
- Zatsarinina Transformer (ENGLEZA)Document4 pagesZatsarinina Transformer (ENGLEZA)Viorel BuzduganPas encore d'évaluation
- Wirk-, Blind - Und Scheinleistung in Elektrischen Stromkreisen Mit NichtsinusförmigemDocument8 pagesWirk-, Blind - Und Scheinleistung in Elektrischen Stromkreisen Mit NichtsinusförmigemAlexandre PereiraPas encore d'évaluation
- ¨ U1.3a elektrisches Feld: 1 1 2 1 −12 As Vm 2 −12 As Vm 1 π 4 1 30 7 E EDocument3 pages¨ U1.3a elektrisches Feld: 1 1 2 1 −12 As Vm 2 −12 As Vm 1 π 4 1 30 7 E Efootball4everrrPas encore d'évaluation
- Fragen AusarbeitungDocument15 pagesFragen Ausarbeitungcoachj21Pas encore d'évaluation
- PH 2019 AalspdfDocument13 pagesPH 2019 AalspdfPinaki SankarPas encore d'évaluation
- Curs Grundlagen Der ElektrotechnikDocument74 pagesCurs Grundlagen Der ElektrotechnikmihaisensePas encore d'évaluation
- Magnetische Antennen - Ein Bauprojekt Der OV S Z 84 Und H 55Document15 pagesMagnetische Antennen - Ein Bauprojekt Der OV S Z 84 Und H 55Ingo KnitoPas encore d'évaluation
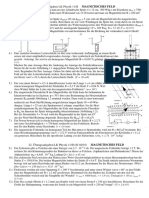
- Bungsaufgaben LK Physik 11 II Magnetisches Feld 22Document1 pageBungsaufgaben LK Physik 11 II Magnetisches Feld 2294z22xyhtgPas encore d'évaluation
- Testprüfung EÜVDocument2 pagesTestprüfung EÜVYasmin MradPas encore d'évaluation
- Maxwell Gleich Un GenDocument23 pagesMaxwell Gleich Un GenAanPas encore d'évaluation
- Das Orbitalmodell Volles SkriptumDocument7 pagesDas Orbitalmodell Volles SkriptumMatteo AuerPas encore d'évaluation
- Proracun Malih Transformatora PDFDocument16 pagesProracun Malih Transformatora PDFsamironiPas encore d'évaluation
- 5 Klausur VorbereitungDocument10 pages5 Klausur VorbereitungAlex RodriguezPas encore d'évaluation
- 03 TeslatrafoDocument40 pages03 TeslatrafoServietosPas encore d'évaluation
- A4 Dokumentation Mantelwellen Von DF1BTDocument32 pagesA4 Dokumentation Mantelwellen Von DF1BTNicola RizziPas encore d'évaluation
- Physik 2016 ADocument13 pagesPhysik 2016 APinaki SankarPas encore d'évaluation
- E 1144 NFDocument4 pagesE 1144 NFkulin123456Pas encore d'évaluation
- 131 MagneteDocument1 page131 Magnetethomas schuhmannPas encore d'évaluation
- OrbitalDocument12 pagesOrbitalk7jdcfnzfhPas encore d'évaluation
- Thüringer Kultusministerium: Abiturprüfung 1999Document19 pagesThüringer Kultusministerium: Abiturprüfung 1999kulin123456Pas encore d'évaluation
- PH 2023Document16 pagesPH 2023Pinaki SankarPas encore d'évaluation
- 1GIG Wechselstrom 2022-07-06Document73 pages1GIG Wechselstrom 2022-07-06Frank FasbenderPas encore d'évaluation
- bwb2 2009 Exp Elektrizitt GlimmlampeDocument2 pagesbwb2 2009 Exp Elektrizitt GlimmlampeLê AnkanixPas encore d'évaluation
- Ueber Das Streufeld Und Den Streuinduktionskoeffizienten Eines Transformators Rogowski W. OCR 2Document38 pagesUeber Das Streufeld Und Den Streuinduktionskoeffizienten Eines Transformators Rogowski W. OCR 2cristian1961100% (1)
- © Festo Didactic GMBH & Co. KG - 654966 (07/03) Änderungen VorbehaltenDocument8 pages© Festo Didactic GMBH & Co. KG - 654966 (07/03) Änderungen VorbehaltenSteven Escate ChamorroPas encore d'évaluation
- Lastgeführte StromrichterDocument10 pagesLastgeführte Stromrichteranton99Pas encore d'évaluation
- Tranzistors GERDocument17 pagesTranzistors GERRed EaglePas encore d'évaluation
- GMZ 1980erDocument59 pagesGMZ 1980erErwinPas encore d'évaluation
- Longitudinalwellen ExperimentDocument9 pagesLongitudinalwellen ExperimentrainerPas encore d'évaluation
- Physik 2017 ADocument13 pagesPhysik 2017 APinaki SankarPas encore d'évaluation
- GAZ NiCD Battery Made in GermanyDocument16 pagesGAZ NiCD Battery Made in GermanyVĂN THÀNH TRƯƠNGPas encore d'évaluation
- 2 Erregungsleitung BB Version WiSe 2012Document99 pages2 Erregungsleitung BB Version WiSe 2012dethleff901Pas encore d'évaluation
- Skript Kap3 - Rotierende Elektrische MaschinenDocument15 pagesSkript Kap3 - Rotierende Elektrische MaschinenШкруднева МаринаPas encore d'évaluation
- Calculo 1.2Document8 pagesCalculo 1.2Paco GilPas encore d'évaluation
- RaFöG - GeneratorenDocument8 pagesRaFöG - GeneratorenmyfarlockPas encore d'évaluation
- Die Entdeckung Der Induktion Durch FaradayDocument5 pagesDie Entdeckung Der Induktion Durch FaradayHerman ToothrotPas encore d'évaluation
- Probeklausur Elektrische Energie - Und Antriebstechnik HS KemptenDocument9 pagesProbeklausur Elektrische Energie - Und Antriebstechnik HS KemptenAmirah AtiqahPas encore d'évaluation
- Erläuterung Der Lecherantennen-SchieberDocument7 pagesErläuterung Der Lecherantennen-SchieberManolo100% (2)
- ThyristorenDocument14 pagesThyristorenanton99Pas encore d'évaluation
- P. P. Ewald: Die Berechnung Optischer Und Electrostatischer GitterpotentaleDocument35 pagesP. P. Ewald: Die Berechnung Optischer Und Electrostatischer Gitterpotentalez.kovacsPas encore d'évaluation
- 3B Scientific® Physics: Elektronenbeugungsröhre S 1013889Document18 pages3B Scientific® Physics: Elektronenbeugungsröhre S 1013889Ney MarçalPas encore d'évaluation
- Physik: InduktionDocument4 pagesPhysik: InduktionNina die NinaPas encore d'évaluation
- Verstaerker A78Document6 pagesVerstaerker A78rePas encore d'évaluation
- Thüringer Kultusministerium: Abiturprüfung 1997Document13 pagesThüringer Kultusministerium: Abiturprüfung 1997kulin123456Pas encore d'évaluation
- WWW - Kupferinstitut.de Bedarfsgerechte Auswahl Von Klein Transform at or enDocument16 pagesWWW - Kupferinstitut.de Bedarfsgerechte Auswahl Von Klein Transform at or enGTOxxxPas encore d'évaluation
- Philips N 4416 Owners ManualDocument14 pagesPhilips N 4416 Owners ManualFerenc HanolPas encore d'évaluation
- W. Rogowski, K. Baumgart (auth.), Prof. Dr.-Ing. W. Rogowski (eds.) - Arbeiten aus dem Elektrotechnischen Institut der Technischen Hochschule Aachen_ Band III_ 1928-Springer-Verlag Berlin Heidelberg (.pdfDocument227 pagesW. Rogowski, K. Baumgart (auth.), Prof. Dr.-Ing. W. Rogowski (eds.) - Arbeiten aus dem Elektrotechnischen Institut der Technischen Hochschule Aachen_ Band III_ 1928-Springer-Verlag Berlin Heidelberg (.pdfpolinarinoPas encore d'évaluation
- T1000 ManualDocument53 pagesT1000 ManualClem OstergaardPas encore d'évaluation
- Physik KlausurDocument6 pagesPhysik KlausurMarcelo LiebmingerPas encore d'évaluation
- Kapitel 3 Induktion Teil2Document23 pagesKapitel 3 Induktion Teil2Pradipta Surya BaskaraPas encore d'évaluation
- Eth Exam6Document39 pagesEth Exam6Natan costaPas encore d'évaluation
- Versuchsprotokoll B8Document9 pagesVersuchsprotokoll B8pullermannPas encore d'évaluation
- Blatt5 Sommer2021Document1 pageBlatt5 Sommer2021Pradipta Surya BaskaraPas encore d'évaluation
- Rastavljanje I Ponovno Sastavljanje Kompletnog Motora - Zatezanje1Document6 pagesRastavljanje I Ponovno Sastavljanje Kompletnog Motora - Zatezanje1alokinxxPas encore d'évaluation
- EA Umdr Kap 3Document23 pagesEA Umdr Kap 3alokinxxPas encore d'évaluation
- EA Umdr Kap 3Document23 pagesEA Umdr Kap 3alokinxxPas encore d'évaluation
- Električne Mašine - 1Document22 pagesElektrične Mašine - 1alokinxxPas encore d'évaluation
- Dipl Steinbrink KommutatorwicklungDocument2 pagesDipl Steinbrink KommutatorwicklungalokinxxPas encore d'évaluation
- Grundlagen Elektrischer AntriebeDocument81 pagesGrundlagen Elektrischer AntriebeAnonymous xCH8eoFXVPas encore d'évaluation
- Einsteins SpukDocument10 pagesEinsteins Spukmike960Pas encore d'évaluation
- Garen - Wikipedia PDFDocument7 pagesGaren - Wikipedia PDFNIEPas encore d'évaluation
- 08-Bemessung Von Stahlbauteilen Nach Din 18800Document5 pages08-Bemessung Von Stahlbauteilen Nach Din 18800ceca89Pas encore d'évaluation
- Flow Induced VibrationsDocument10 pagesFlow Induced Vibrationssara25dec689288Pas encore d'évaluation
- SeilstatikDocument9 pagesSeilstatikCoco Niculescu100% (1)