Vous aimerez peut-être aussi
- Robotics: Designing the Mechanisms for Automated MachineryD'EverandRobotics: Designing the Mechanisms for Automated MachineryÉvaluation : 4.5 sur 5 étoiles4.5/5 (8)
- Research Paper Inverted PendulumDocument4 pagesResearch Paper Inverted Pendulumfvffybz9100% (1)
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaD'EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiPas encore d'évaluation
- XYZ Acquisition System: Talha Ahmed Khan Ee-08-266 IMRAN SAEED EE-08-289Document9 pagesXYZ Acquisition System: Talha Ahmed Khan Ee-08-266 IMRAN SAEED EE-08-289aloneheartsPas encore d'évaluation
- Project Segway 3 WheelDocument26 pagesProject Segway 3 WheelMohit ChetwaniPas encore d'évaluation
- Pid Based Self-Balancing RobotDocument51 pagesPid Based Self-Balancing RobotRajat SinghPas encore d'évaluation
- IEEE ConferenceDocument7 pagesIEEE ConferenceFawaz PartoPas encore d'évaluation
- Control BookDocument500 pagesControl BookManoj SinghPas encore d'évaluation
- Quadcopter Master ThesisDocument6 pagesQuadcopter Master ThesisHelpInWritingPaperUK100% (2)
- ME4555 TwoMass Control Spring2021 PART 1 2Document18 pagesME4555 TwoMass Control Spring2021 PART 1 2Rax UtaPas encore d'évaluation
- Master Thesis QuadcopterDocument4 pagesMaster Thesis QuadcopterCustomPaperWritersCanada100% (2)
- Inverted PendulumDocument24 pagesInverted PendulumOmarShindiPas encore d'évaluation
- 2003 BalanceDocument10 pages2003 BalanceAnonymous HsoXPyPas encore d'évaluation
- Cercetari Privind Echilibrarea Pendulului Invers Research Concerning The Equilibration of The Inverted PendulumDocument8 pagesCercetari Privind Echilibrarea Pendulului Invers Research Concerning The Equilibration of The Inverted PendulumFanica ScarlatPas encore d'évaluation
- Inverted 2024Document21 pagesInverted 2024MohammedPas encore d'évaluation
- Inverted PendulumDocument71 pagesInverted PendulumShruti100% (1)
- Dynamic Rotary Inverted PendulumDocument18 pagesDynamic Rotary Inverted PendulumNguyễn SangPas encore d'évaluation
- Design of A Bipedal Walking RobotDocument14 pagesDesign of A Bipedal Walking RobotRaja ManePas encore d'évaluation
- dr2 - The DocsDocument14 pagesdr2 - The Docsapi-252247987Pas encore d'évaluation
- MQP RoboDog Final ReportDocument64 pagesMQP RoboDog Final ReportThink DiagPas encore d'évaluation
- ME464CEP FinalReportDocument20 pagesME464CEP FinalReportAdam SurtiPas encore d'évaluation
- FYP OrnithopterDocument22 pagesFYP OrnithopterFaisal Saleh RazaPas encore d'évaluation
- Design and Development of Box Shifting Mechanism Using Gearless Power Transmission System1Document5 pagesDesign and Development of Box Shifting Mechanism Using Gearless Power Transmission System1International Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- QBlade Guidelines v09 PDFDocument37 pagesQBlade Guidelines v09 PDFAlexandre FariaPas encore d'évaluation
- Design and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakeDocument4 pagesDesign and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakePreeti BhamrePas encore d'évaluation
- Balancing RobotDocument5 pagesBalancing RobotMilton MuñozPas encore d'évaluation
- Controller Design ThesisDocument4 pagesController Design Thesisaprilgriffinbeaumont100% (2)
- Direct Drive, Dave RoweDocument7 pagesDirect Drive, Dave RoweiamisterdPas encore d'évaluation
- SC4050: Integration Project Control of Inverted Pendulum: Robert Babuska / Gabriel LopesDocument27 pagesSC4050: Integration Project Control of Inverted Pendulum: Robert Babuska / Gabriel LopesShekhar GuptaPas encore d'évaluation
- Vivek Adap SuspDocument21 pagesVivek Adap SuspMohammed Asif NPas encore d'évaluation
- Control Theory - AssignmentsDocument5 pagesControl Theory - AssignmentsAmar BeheraPas encore d'évaluation
- ABSTRACTDocument16 pagesABSTRACTMrinalshePas encore d'évaluation
- Research Article: A Two-Wheeled Self-Balancing Robot With The Fuzzy PD Control MethodDocument14 pagesResearch Article: A Two-Wheeled Self-Balancing Robot With The Fuzzy PD Control MethodMurat Yasar ERTASPas encore d'évaluation
- MD Report Project FinalDocument12 pagesMD Report Project FinalfawadPas encore d'évaluation
- ADVANDocument22 pagesADVANNguyenLeNhuTrongPas encore d'évaluation
- Implementation of A Skating Motion On A Spider Robot: Bachelor ThesisDocument55 pagesImplementation of A Skating Motion On A Spider Robot: Bachelor ThesisRodriguez ArthursPas encore d'évaluation
- Design of Fuzzy Logic Based Controller For Gyroscopic Inverted PendulumDocument8 pagesDesign of Fuzzy Logic Based Controller For Gyroscopic Inverted Pendulumban bekasPas encore d'évaluation
- Auto-Balancing Two Wheeled Inverted Pendulum RobotDocument6 pagesAuto-Balancing Two Wheeled Inverted Pendulum Robotsaran gowdaPas encore d'évaluation
- Jacob-Amir-Pendulum Final ReportDocument6 pagesJacob-Amir-Pendulum Final ReportDragan ErcegPas encore d'évaluation
- Minor Final - PPTDocument20 pagesMinor Final - PPTHRISHABH CHOPRAPas encore d'évaluation
- Roboclimber: MCL211 Design of Machines Final SubmissionDocument33 pagesRoboclimber: MCL211 Design of Machines Final SubmissionNavneet GoyalPas encore d'évaluation
- Position Control and Trajectory Tracking of The Stewart PlatformDocument27 pagesPosition Control and Trajectory Tracking of The Stewart PlatformGunjan KhutPas encore d'évaluation
- Control BookDocument422 pagesControl BookFilipe Gama FreirePas encore d'évaluation
- System Control: 1st Half of Semester Dept. of Mechanical EngineeringDocument94 pagesSystem Control: 1st Half of Semester Dept. of Mechanical Engineeringفحرلرز دیمسPas encore d'évaluation
- Quadcopter Design ThesisDocument7 pagesQuadcopter Design Thesisafknrbsaw100% (2)
- Literature Review QuadcopterDocument5 pagesLiterature Review Quadcopterea2pbjqk100% (1)
- Quadruped Walking Running SimulationDocument49 pagesQuadruped Walking Running SimulationbilynbkPas encore d'évaluation
- Project I Group 31 v5Document20 pagesProject I Group 31 v5Kaushik KunalePas encore d'évaluation
- Automatic Control of Electrical Overhead Smart Trolley Crane AEOSTC Based Programmable Logic Controller (PLC)Document10 pagesAutomatic Control of Electrical Overhead Smart Trolley Crane AEOSTC Based Programmable Logic Controller (PLC)arif hasanPas encore d'évaluation
- Literature Review Pid ControllerDocument6 pagesLiterature Review Pid Controlleraflskeqjr100% (1)
- Project Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectoryDocument19 pagesProject Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectorySidharth Suresh KumarPas encore d'évaluation
- Duart 2017 J. Phys.: Conf. Ser. 792 012081 PDFDocument18 pagesDuart 2017 J. Phys.: Conf. Ser. 792 012081 PDFnick_mafraPas encore d'évaluation
- A New Approach On Stabilization Control of An InveDocument6 pagesA New Approach On Stabilization Control of An InveHưng Nguyễn Trần NhựtPas encore d'évaluation
- Fuzzy Logic Control of An Inverted Pendulum Robot (Excelente Referencia Com Funções em C)Document62 pagesFuzzy Logic Control of An Inverted Pendulum Robot (Excelente Referencia Com Funções em C)Julia PrestesPas encore d'évaluation
- Advanced Controls MidDocument7 pagesAdvanced Controls Midbot10Pas encore d'évaluation
- Open Source Dual-Purpose Acrobot and Pendubot Platform Benchmarking Control Algorithms For Underactuated RoboticsDocument12 pagesOpen Source Dual-Purpose Acrobot and Pendubot Platform Benchmarking Control Algorithms For Underactuated RoboticsMurulidhar L MPas encore d'évaluation
- Arduino Controlled CatapultDocument4 pagesArduino Controlled Catapultapi-297434884Pas encore d'évaluation
- DesignofaTwo WheelSelf BalancingRobotDocument11 pagesDesignofaTwo WheelSelf BalancingRobotSkHasanPas encore d'évaluation
- Nonovershooting Regulation of An Under-Sensed and Under-Actuated Linear Inverted PendulumDocument5 pagesNonovershooting Regulation of An Under-Sensed and Under-Actuated Linear Inverted PendulumYang ElvisQUPas encore d'évaluation
- Diogo Almeida MT 2Document58 pagesDiogo Almeida MT 2pet_alienPas encore d'évaluation
- Habilis Pec 11Document8 pagesHabilis Pec 11Essej OrtsacPas encore d'évaluation
- Vacon NXC User Manual DPD00890B UKDocument112 pagesVacon NXC User Manual DPD00890B UKthiago_gomes7953Pas encore d'évaluation
- Av78 0006Document12 pagesAv78 0006Franco PugaPas encore d'évaluation
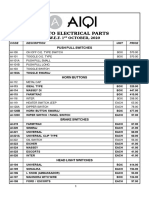
- Aiqi (October 2020)Document23 pagesAiqi (October 2020)prince mittalPas encore d'évaluation
- Six Week Industrial Training at 66 KV SubDocument32 pagesSix Week Industrial Training at 66 KV SubGurinderdeep Singh67% (3)
- HLSPS25-50 Alimentatori PDFDocument16 pagesHLSPS25-50 Alimentatori PDFDanielPas encore d'évaluation
- Manual Imes Icore 350i InglêsDocument79 pagesManual Imes Icore 350i InglêsEugenStanciu75% (4)
- DOLD Stepping RelayDocument2 pagesDOLD Stepping RelayVikrantPas encore d'évaluation
- Motor Acceleration AnalysisDocument4 pagesMotor Acceleration AnalysisMukti AliPas encore d'évaluation
- ACTOM MV GMA - SingleDocument4 pagesACTOM MV GMA - SingleDevon Antony HeuerPas encore d'évaluation
- XR10C - XR10D: Digital Controller With Cooling or Heating ActionDocument4 pagesXR10C - XR10D: Digital Controller With Cooling or Heating ActionJennifer Eszter SárközyPas encore d'évaluation
- WM1 ManualDocument176 pagesWM1 ManualGruPas encore d'évaluation
- Siemens Polymobil - Function DescriptionDocument12 pagesSiemens Polymobil - Function Descriptionsadeq03100% (1)
- Product Specifications:: Series:NEO Colour: Grey Silver With Blue LED Locator Brand: Schneider ElectricDocument3 pagesProduct Specifications:: Series:NEO Colour: Grey Silver With Blue LED Locator Brand: Schneider ElectricSayemAbusadatPas encore d'évaluation
- L10 Operating and Programming ManualDocument92 pagesL10 Operating and Programming ManualCristopher EntenaPas encore d'évaluation
- z2gbm ZokDocument57 pagesz2gbm ZokcarlsPas encore d'évaluation
- Manual Bascula Detecto Slimpro PDFDocument12 pagesManual Bascula Detecto Slimpro PDFSomerPas encore d'évaluation
- Modeling and Simulation of Electrical Prevenion System Using Arduino Uno, GSM Modem, and Acs712 Current SensorDocument9 pagesModeling and Simulation of Electrical Prevenion System Using Arduino Uno, GSM Modem, and Acs712 Current SensorAnifPas encore d'évaluation
- Chapter Vii. Design-Power WaterwaysDocument28 pagesChapter Vii. Design-Power WaterwaysvesselPas encore d'évaluation
- Gmax Service ManualDocument157 pagesGmax Service ManualBenny Kaysen SørensenPas encore d'évaluation
- Feeder Protection and Control REF601 and REJ601 ANSI: Product GuideDocument20 pagesFeeder Protection and Control REF601 and REJ601 ANSI: Product GuideAdarsh SharmaPas encore d'évaluation
- Factory Cat 34-D Gtx-Op-En Service ManualDocument36 pagesFactory Cat 34-D Gtx-Op-En Service ManualMelwyn FernandesPas encore d'évaluation
- Manual Módulo Gunt CE640e - V0.4Document78 pagesManual Módulo Gunt CE640e - V0.4Mariana SotoPas encore d'évaluation
- CP96-Bb EU PDFDocument32 pagesCP96-Bb EU PDFcycypacoPas encore d'évaluation
- 4C Eds / Efs Series Control Stations: Flexstation Control Station ComponentsDocument5 pages4C Eds / Efs Series Control Stations: Flexstation Control Station ComponentsAlex RamirezPas encore d'évaluation
- Condensed Checklist F 86F 35Document6 pagesCondensed Checklist F 86F 35Juan Francisco Sanchez MassadiPas encore d'évaluation
- 3WL1 Upgrade EN 201901221016555255 PDFDocument98 pages3WL1 Upgrade EN 201901221016555255 PDFDasPas encore d'évaluation
- HB Schunk-FC42-Stacks Eng 20Document39 pagesHB Schunk-FC42-Stacks Eng 20Fabio Pedroso de MoraisPas encore d'évaluation
- TongherDocument20 pagesTongherSafiullah TariqPas encore d'évaluation
- C37 20 4-2001Document32 pagesC37 20 4-2001Rakesh Kumar100% (1)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldD'EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (55)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessD'EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessPas encore d'évaluation
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindD'EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindPas encore d'évaluation
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveD'EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurvePas encore d'évaluation
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldD'EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (107)
- Generative AI: The Insights You Need from Harvard Business ReviewD'EverandGenerative AI: The Insights You Need from Harvard Business ReviewÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesD'EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesÉvaluation : 4.5 sur 5 étoiles4.5/5 (13)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewD'EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewÉvaluation : 4.5 sur 5 étoiles4.5/5 (104)
- Artificial Intelligence: A Guide for Thinking HumansD'EverandArtificial Intelligence: A Guide for Thinking HumansÉvaluation : 4.5 sur 5 étoiles4.5/5 (30)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceD'EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceÉvaluation : 4.5 sur 5 étoiles4.5/5 (38)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)D'EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Évaluation : 4 sur 5 étoiles4/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkD'EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkÉvaluation : 4 sur 5 étoiles4/5 (7)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeD'EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeÉvaluation : 4.5 sur 5 étoiles4.5/5 (69)
- The Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsD'EverandThe Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsPas encore d'évaluation
- Four Battlegrounds: Power in the Age of Artificial IntelligenceD'EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceÉvaluation : 5 sur 5 étoiles5/5 (5)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziD'Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziPas encore d'évaluation
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepD'EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepÉvaluation : 4.5 sur 5 étoiles4.5/5 (19)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceD'EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceÉvaluation : 4 sur 5 étoiles4/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.D'EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Évaluation : 4 sur 5 étoiles4/5 (15)
- Fusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureD'EverandFusion Strategy: How Real-Time Data and AI Will Power the Industrial FuturePas encore d'évaluation
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsD'EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsPas encore d'évaluation
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideD'EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideÉvaluation : 5 sur 5 étoiles5/5 (1)