Vous aimerez peut-être aussi
- Human Posture Alert Jacket ThesisDocument43 pagesHuman Posture Alert Jacket ThesisHamzaPas encore d'évaluation
- BCI BASED HOME AUTOMATION SYSTEM Report PDFDocument66 pagesBCI BASED HOME AUTOMATION SYSTEM Report PDFshamshadPas encore d'évaluation
- Air Pollution Monitoring Using IOTDocument52 pagesAir Pollution Monitoring Using IOTVatsal Gupta100% (1)
- Ocr GttsDocument53 pagesOcr GttsKshitij NishantPas encore d'évaluation
- Software Engineering Project Project Name: Irrigation SystemDocument34 pagesSoftware Engineering Project Project Name: Irrigation SystemSikandar AliPas encore d'évaluation
- Pratyu FinalDocument63 pagesPratyu FinalIsmart GamingPas encore d'évaluation
- Office Skill Competencie Needed by Secretaries For Effective Job PerformanceDocument14 pagesOffice Skill Competencie Needed by Secretaries For Effective Job PerformanceJoseph JboyPas encore d'évaluation
- Coin Detection Mobile ChargingDocument39 pagesCoin Detection Mobile ChargingAman GuptaPas encore d'évaluation
- Final DocDocument128 pagesFinal DocMourya MandavaPas encore d'évaluation
- Password Based Circuit BreakerDocument8 pagesPassword Based Circuit BreakerRakshitha kPas encore d'évaluation
- Comparative Water Requirements For Rice Irrigation Using FAO-CROPWAT MODEL-Case Study-Cross River Basin - 270219 Rev9Document78 pagesComparative Water Requirements For Rice Irrigation Using FAO-CROPWAT MODEL-Case Study-Cross River Basin - 270219 Rev9Engr Evans OhajiPas encore d'évaluation
- ReportDocument38 pagesReportvaishnaviPas encore d'évaluation
- Major Project Shopping TrolleyDocument50 pagesMajor Project Shopping TrolleyRohith SharmaPas encore d'évaluation
- Access Control SystemDocument19 pagesAccess Control Systemkasali123Pas encore d'évaluation
- Early Detection of Building Collapse Using IotDocument14 pagesEarly Detection of Building Collapse Using IotAfraa AnwarPas encore d'évaluation
- An Industry Oriented Mini Project Report: "Authentication by Face Recognition Using Open-Cv Python"Document40 pagesAn Industry Oriented Mini Project Report: "Authentication by Face Recognition Using Open-Cv Python"nick furiasPas encore d'évaluation
- EE CPP Final Project 3rd YearDocument32 pagesEE CPP Final Project 3rd YearShaikh ZeeshanPas encore d'évaluation
- Concrete Basics NWADocument91 pagesConcrete Basics NWArocky7sharma-89684Pas encore d'évaluation
- Report On Exam Paper Security SystemDocument92 pagesReport On Exam Paper Security SystemSumit Singhal50% (2)
- Internet of Things PDFDocument20 pagesInternet of Things PDFwei fooPas encore d'évaluation
- Gas DetectorDocument5 pagesGas Detectorbreached13Pas encore d'évaluation
- Clap Switch PDFDocument19 pagesClap Switch PDFANKUSH GUPTAPas encore d'évaluation
- Telepresence Electronics Seminar ReportDocument25 pagesTelepresence Electronics Seminar ReportAshish Ben Ajay100% (1)
- Effectiveness of UVDocument49 pagesEffectiveness of UVmajortayPas encore d'évaluation
- Solar Fencing Protects CropsDocument16 pagesSolar Fencing Protects CropsPooja BanPas encore d'évaluation
- Control AC Lamp Dimming via Mobile BluetoothDocument2 pagesControl AC Lamp Dimming via Mobile BluetoothHari KishorPas encore d'évaluation
- Automatic Water Pump Controller Project ReportDocument44 pagesAutomatic Water Pump Controller Project ReportNitin Verma100% (1)
- PLC Based Industrial Sorting Thesis ReportDocument63 pagesPLC Based Industrial Sorting Thesis ReportVishal MeghwarPas encore d'évaluation
- Fabrication of Metal DetectorDocument41 pagesFabrication of Metal DetectorManishPas encore d'évaluation
- Design and Fabrication of Automatic Seed Sowing MachineDocument31 pagesDesign and Fabrication of Automatic Seed Sowing MachineSakthiVelMPas encore d'évaluation
- Ndubueze 09 PH DDocument450 pagesNdubueze 09 PH DJoy MainaPas encore d'évaluation
- Thermal Management of Photovoltaic Panel Using PCM For Improved eDocument127 pagesThermal Management of Photovoltaic Panel Using PCM For Improved eLYNCHPas encore d'évaluation
- Water Level Indicator Using 7segment DisplayDocument1 pageWater Level Indicator Using 7segment DisplayGopi Nath100% (1)
- Protection and Monitoring of Three Phase Induction Motor From Over Voltage, Under Voltage, Single Phasing, Phase Reversal, and Overheating ReviewDocument4 pagesProtection and Monitoring of Three Phase Induction Motor From Over Voltage, Under Voltage, Single Phasing, Phase Reversal, and Overheating ReviewAnonymous CUPykm6DZPas encore d'évaluation
- Kantipur Engineering College (Affiliated To Tribhuvan University) Dhapakhel, LalitpurDocument12 pagesKantipur Engineering College (Affiliated To Tribhuvan University) Dhapakhel, LalitpurJENISH BADYA SHRESTHAPas encore d'évaluation
- Automatic plant irrigation system with soil sensingDocument21 pagesAutomatic plant irrigation system with soil sensingRam MohanPas encore d'évaluation
- Solar FenceDocument31 pagesSolar FenceSARIKAPas encore d'évaluation
- Chapter 1 6 and AppendixDocument238 pagesChapter 1 6 and AppendixLhyne AsuncionPas encore d'évaluation
- Iot Circuit BreakerDocument5 pagesIot Circuit BreakerMadhuri RudravelliPas encore d'évaluation
- DVR Project Report PDFDocument38 pagesDVR Project Report PDFabhishekPas encore d'évaluation
- Intelligent Saline Monitoring SystemDocument3 pagesIntelligent Saline Monitoring SystemAnonymous izrFWiQPas encore d'évaluation
- 18CEO307T DMM Unit-II Lecture NotesDocument18 pages18CEO307T DMM Unit-II Lecture Notespratham sainiPas encore d'évaluation
- Heart Rate and Pulse Waveform MonitorDocument33 pagesHeart Rate and Pulse Waveform MonitorPraveen dewalPas encore d'évaluation
- Underground Cable Fault Detection and LocationDocument77 pagesUnderground Cable Fault Detection and LocationZerihun PaulosPas encore d'évaluation
- Nyein Myo San R.ep-14Document73 pagesNyein Myo San R.ep-14Nyein Myo SanPas encore d'évaluation
- Eye Blink DocumentDocument38 pagesEye Blink Documentpavani13Pas encore d'évaluation
- GSM Based RobotDocument232 pagesGSM Based RobotTanvi KhuranaPas encore d'évaluation
- Microcontroller Load Control via BluetoothDocument69 pagesMicrocontroller Load Control via BluetoothRupak TiwariPas encore d'évaluation
- Control With Hand GesturesDocument18 pagesControl With Hand GesturesAjithPas encore d'évaluation
- Final Year Project SynopsisDocument5 pagesFinal Year Project SynopsisAshok KumarPas encore d'évaluation
- Mini Project Report: A Dissertation Submitted in Partial Fulfilment of The Requirements For The Award of Degree ofDocument38 pagesMini Project Report: A Dissertation Submitted in Partial Fulfilment of The Requirements For The Award of Degree ofS R I K A N T HPas encore d'évaluation
- Green and Gracious Builder Guide (SMC)Document36 pagesGreen and Gracious Builder Guide (SMC)Jack LeePas encore d'évaluation
- Running LED Wheel with 74154Document24 pagesRunning LED Wheel with 74154Sunny SuryatejaPas encore d'évaluation
- FloodAlert: Automated Flood Warning System For DOST Region IV-A Project HaNDADocument9 pagesFloodAlert: Automated Flood Warning System For DOST Region IV-A Project HaNDAAmadeus Fernando M. PagentePas encore d'évaluation
- Automatic Irrigation System Using Arduino MicrocontrollerDocument41 pagesAutomatic Irrigation System Using Arduino MicrocontrollerCherinet GashawPas encore d'évaluation
- Comprehensive Study of Drowning Detection and Rescue SystemsDocument6 pagesComprehensive Study of Drowning Detection and Rescue Systemsputra mulia rizky selianPas encore d'évaluation
- Virtual Eye - Life Guard For Swimming Pools To Detect Active Drowni - 20240221 - 102048 - 0000Document1 pageVirtual Eye - Life Guard For Swimming Pools To Detect Active Drowni - 20240221 - 102048 - 0000ravirpavithra143Pas encore d'évaluation
- Flood Monitor Baby ThesisDocument23 pagesFlood Monitor Baby ThesisPaula Jane100% (2)
- Drinking Water Security for Engineers, Planners, and Managers: Integrated Water Security SeriesD'EverandDrinking Water Security for Engineers, Planners, and Managers: Integrated Water Security SeriesPas encore d'évaluation
- Wire Sizing Chart For 12V - 24V - 48V DC Systems - DIY Solar ResourcesDocument7 pagesWire Sizing Chart For 12V - 24V - 48V DC Systems - DIY Solar ResourcesMaximilian SylvesterPas encore d'évaluation
- High-Efficiency Pure Sine Wave Inverter PDFDocument123 pagesHigh-Efficiency Pure Sine Wave Inverter PDFMaximilian SylvesterPas encore d'évaluation
- Arduino Based FCSDocument69 pagesArduino Based FCSMaximilian SylvesterPas encore d'évaluation
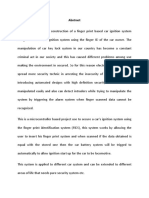
- AbstractDocument18 pagesAbstractMaximilian SylvesterPas encore d'évaluation
- ABSTRACT Gas Cooking StoveDocument7 pagesABSTRACT Gas Cooking StoveMaximilian SylvesterPas encore d'évaluation
- AustinDocument51 pagesAustinMaximilian SylvesterPas encore d'évaluation
- AustinDocument51 pagesAustinMaximilian SylvesterPas encore d'évaluation
- Abstract On Fuel Pumping SystemDocument18 pagesAbstract On Fuel Pumping SystemMaximilian SylvesterPas encore d'évaluation
- ABSTRACT Gas Cooking StoveDocument6 pagesABSTRACT Gas Cooking StoveMaximilian SylvesterPas encore d'évaluation
- Abstract Finger Print Car Ignition SystemDocument1 pageAbstract Finger Print Car Ignition SystemMaximilian SylvesterPas encore d'évaluation
- Anti Drowing SystemDocument82 pagesAnti Drowing SystemMaximilian SylvesterPas encore d'évaluation
- Matlab Simulation of An Induction Motor Using Simuling by MagximDocument77 pagesMatlab Simulation of An Induction Motor Using Simuling by MagximMaximilian SylvesterPas encore d'évaluation
- Car Jack Control System With RemoteDocument72 pagesCar Jack Control System With RemoteMaximilian SylvesterPas encore d'évaluation
- Cock Feed Detection SystemDocument81 pagesCock Feed Detection SystemMaximilian SylvesterPas encore d'évaluation
- AbstractDocument83 pagesAbstractMaximilian SylvesterPas encore d'évaluation
- LANConf User ManualDocument28 pagesLANConf User ManualJosé Luis Mireles EspinozaPas encore d'évaluation
- Subscriber Loop DesignDocument3 pagesSubscriber Loop DesignNaila NaseerPas encore d'évaluation
- Iop851-W00C1: Poe Industry Ap-RouterDocument2 pagesIop851-W00C1: Poe Industry Ap-RouterBob YuPas encore d'évaluation
- Oscillator BasicsDocument20 pagesOscillator BasicsRizGust Anunnaki100% (1)
- 2008-2011 Domestic Battery Charger Maintenance and Service ManualDocument300 pages2008-2011 Domestic Battery Charger Maintenance and Service ManualmbgprsmsPas encore d'évaluation
- 9100 Bts HW DescriptionDocument914 pages9100 Bts HW Descriptionsadriberisha100% (2)
- Ieee 902Document142 pagesIeee 902Abraham Gutierrez CentenoPas encore d'évaluation
- Form 1.1 Sample Data Gathering Instrument For TraineeDocument3 pagesForm 1.1 Sample Data Gathering Instrument For TraineeDanilo CumpioPas encore d'évaluation
- Andrew DBXLH 6565d VTMDocument4 pagesAndrew DBXLH 6565d VTMHenry FloresPas encore d'évaluation
- Inverter Catalog - MUST 2020 NEWDocument26 pagesInverter Catalog - MUST 2020 NEWsteven6diaz-2Pas encore d'évaluation
- +030220721 Carel InvertersDocument48 pages+030220721 Carel InvertersΝικόλας ΧιονάςPas encore d'évaluation
- PDF 01 ControlsDocument6 pagesPDF 01 ControlshazopmanPas encore d'évaluation
- Analog and Digital Communications TechniquesDocument3 pagesAnalog and Digital Communications TechniquesSrinivas SamalPas encore d'évaluation
- Implementation of A Powerline Vandalism Monitoring System Via The Internet of ThingsDocument9 pagesImplementation of A Powerline Vandalism Monitoring System Via The Internet of ThingsIJRASETPublicationsPas encore d'évaluation
- ONS Muxponder CardDocument14 pagesONS Muxponder CardBruno DiazPas encore d'évaluation
- Virtual DJ Skin Pioneer CDJ 2000 DJM 800 1024x768 Mietwohnung Horoscop PDFDocument3 pagesVirtual DJ Skin Pioneer CDJ 2000 DJM 800 1024x768 Mietwohnung Horoscop PDFMark100% (1)
- Ericsson LTE FDD Idle Mode BehaviorDocument39 pagesEricsson LTE FDD Idle Mode Behaviorsameh sheblPas encore d'évaluation
- Cell-Free Massive MIMO SystemsDocument5 pagesCell-Free Massive MIMO SystemsMalakPas encore d'évaluation
- Kodak Multiloader 700-Plus Side-By-side-kit - User ManualDocument14 pagesKodak Multiloader 700-Plus Side-By-side-kit - User ManualNikolay PenevPas encore d'évaluation
- Analyze 900 Coverage Reduction from High RTWP InterferenceDocument4 pagesAnalyze 900 Coverage Reduction from High RTWP InterferenceAdil MuradPas encore d'évaluation
- TN73-2 Electromagnetic Disturbance Troubleshooting HelpDocument6 pagesTN73-2 Electromagnetic Disturbance Troubleshooting HelpCharls GuevaraPas encore d'évaluation
- Electromagnets and Ohms Law LabDocument2 pagesElectromagnets and Ohms Law Labapi-3258649850% (1)
- Linear and Digital Ic ApplicationsDocument47 pagesLinear and Digital Ic Applicationsభార్గవ్ కుమార్100% (1)
- EST QuestionDocument3 pagesEST QuestionashPas encore d'évaluation
- P2220 Ponta de ProvaDocument4 pagesP2220 Ponta de Provahigor costaPas encore d'évaluation
- Panel Remoto PM-DCP PDFDocument16 pagesPanel Remoto PM-DCP PDFroberto sanchezPas encore d'évaluation
- Megger PricelistDocument2 pagesMegger PricelistNagendraPas encore d'évaluation
- Automatic Test EquipmentDocument6 pagesAutomatic Test EquipmentMihaela DanilescuPas encore d'évaluation
- Jfet Frequency ResponseDocument22 pagesJfet Frequency Responsezed cozPas encore d'évaluation
- SYNC IEC60870-5 101 Master Interface Usermanual Rev1.0.6Document24 pagesSYNC IEC60870-5 101 Master Interface Usermanual Rev1.0.6Thành CôngPas encore d'évaluation