Vous aimerez peut-être aussi
- Lecture 15Document7 pagesLecture 15Arsya azzPas encore d'évaluation
- λ and vectors x = 0 f or which Ax = λxDocument22 pagesλ and vectors x = 0 f or which Ax = λxJohn MarkPas encore d'évaluation
- Problem Set #1. Due Sept. 9 2020.: MAE 501 - Fall 2020. Luc Deike, Anastasia Bizyaeva, Jiarong Wu September 2, 2020Document3 pagesProblem Set #1. Due Sept. 9 2020.: MAE 501 - Fall 2020. Luc Deike, Anastasia Bizyaeva, Jiarong Wu September 2, 2020Francisco SáenzPas encore d'évaluation
- Linear Algebra Via Complex Analysis: Alexander P. Campbell Daniel Daners Corrected Version January 24, 2014Document17 pagesLinear Algebra Via Complex Analysis: Alexander P. Campbell Daniel Daners Corrected Version January 24, 2014IgorBorodinPas encore d'évaluation
- hw8 Solns PDFDocument7 pageshw8 Solns PDFDon QuixotePas encore d'évaluation
- 1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Document8 pages1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Pushkaraj PansePas encore d'évaluation
- LA2 S2023 Lecture 19Document17 pagesLA2 S2023 Lecture 19tasheebedanePas encore d'évaluation
- Lec3 PDFDocument9 pagesLec3 PDFyacp16761Pas encore d'évaluation
- Least Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Document12 pagesLeast Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Anonymous J1scGXwkKDPas encore d'évaluation
- Linear Least SquaresDocument21 pagesLinear Least SquareskkaytugPas encore d'évaluation
- 05 MixedPrecisionsSolversDocument28 pages05 MixedPrecisionsSolverssusma sapkotaPas encore d'évaluation
- Completely Positive MapsDocument73 pagesCompletely Positive MapsSaranya NairPas encore d'évaluation
- Hw3sol PDFDocument8 pagesHw3sol PDFShy PeachDPas encore d'évaluation
- Krylov Subspace MethodsDocument8 pagesKrylov Subspace MethodsHabita KadourPas encore d'évaluation
- Eigenvalue Problem: 4.1 MathematicsDocument26 pagesEigenvalue Problem: 4.1 Mathematicssree2728Pas encore d'évaluation
- Math 110: Linear Algebra Homework #10 Problem (1) - Use Induction On The Dimension N of A To Prove That Det (A Xi) Is A PolyDocument4 pagesMath 110: Linear Algebra Homework #10 Problem (1) - Use Induction On The Dimension N of A To Prove That Det (A Xi) Is A PolyCody SagePas encore d'évaluation
- T1A/T1B, Hmcheungae Math 2121 Tutorial 4 October 4, 2018Document6 pagesT1A/T1B, Hmcheungae Math 2121 Tutorial 4 October 4, 2018Toby ChengPas encore d'évaluation
- Placement ExamDocument2 pagesPlacement ExamJeremyWang100% (2)
- ECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EDocument1 pageECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EMuhammad Sohaib ShahidPas encore d'évaluation
- Lecture 4.9. Positive Definite and Semidefinite Forms: April 10, 2020Document8 pagesLecture 4.9. Positive Definite and Semidefinite Forms: April 10, 2020bakra bundiPas encore d'évaluation
- Numerical Linear Algebra University of Edinburgh Past Paper 2021-2022Document5 pagesNumerical Linear Algebra University of Edinburgh Past Paper 2021-2022Jonathan SamuelsPas encore d'évaluation
- 03a1 MIT18 - 409F09 - Scribe21Document8 pages03a1 MIT18 - 409F09 - Scribe21Omar Leon IñiguezPas encore d'évaluation
- Iterative Linear EquationsDocument30 pagesIterative Linear EquationsJORGE FREJA MACIASPas encore d'évaluation
- Homework 3 Solutions PDFDocument7 pagesHomework 3 Solutions PDFforante3Pas encore d'évaluation
- Notes On Some Methods For Solving Linear Systems: Dianne P. O'Leary, 1983 and 1999 September 25, 2007Document11 pagesNotes On Some Methods For Solving Linear Systems: Dianne P. O'Leary, 1983 and 1999 September 25, 2007THuy DvPas encore d'évaluation
- PII - Numerical Analysis II - Iserles (2005) 61pg PDFDocument61 pagesPII - Numerical Analysis II - Iserles (2005) 61pg PDFfdsdsfsdfmgPas encore d'évaluation
- Math 5610 Fall 2018 Notes of 10/15/18 Undergraduate ColloquiumDocument12 pagesMath 5610 Fall 2018 Notes of 10/15/18 Undergraduate Colloquiumbb sparrowPas encore d'évaluation
- Unit 24 Principal Component AnalysisDocument24 pagesUnit 24 Principal Component AnalysisPrabin SilwalPas encore d'évaluation
- 6.2 Iterative Methods: C 2006 Gilbert StrangDocument7 pages6.2 Iterative Methods: C 2006 Gilbert StrangEfstathios SiampisPas encore d'évaluation
- Lecture 4: Linear Systems of Equations and Cramer's Rule: Zhenning Cai September 2, 2019Document5 pagesLecture 4: Linear Systems of Equations and Cramer's Rule: Zhenning Cai September 2, 2019Liu JianghaoPas encore d'évaluation
- Lesson 8 Diagonalization of Matrices: Module 1: Matrices and Linear AlgebraDocument8 pagesLesson 8 Diagonalization of Matrices: Module 1: Matrices and Linear Algebraarpit sharmaPas encore d'évaluation
- PS1BDocument3 pagesPS1BAltantsooj BatsukhPas encore d'évaluation
- Matrix Primer Lect2 PDFDocument15 pagesMatrix Primer Lect2 PDFTarun BharadwajPas encore d'évaluation
- T5 SolutionsDocument3 pagesT5 SolutionstoaobmbPas encore d'évaluation
- MTH101Document13 pagesMTH101Deepanshu BansalPas encore d'évaluation
- A01 Exam1 - 2013Document8 pagesA01 Exam1 - 2013Talha EtnerPas encore d'évaluation
- Mat-Inf4130 2018 FasitDocument5 pagesMat-Inf4130 2018 Fasitzejing wangPas encore d'évaluation
- Gi Part1 PDFDocument57 pagesGi Part1 PDFasdfghjPas encore d'évaluation
- SemiDocument6 pagesSemiYash MehrotraPas encore d'évaluation
- Eigenvalues: Matrices: Geometric InterpretationDocument8 pagesEigenvalues: Matrices: Geometric InterpretationTu DuongPas encore d'évaluation
- A00 Final PracticeDocument4 pagesA00 Final PracticeTalha EtnerPas encore d'évaluation
- Quantum Mechanics Math ReviewDocument5 pagesQuantum Mechanics Math Reviewstrumnalong27Pas encore d'évaluation
- Ar Ve Son Spectral SolutionsDocument43 pagesAr Ve Son Spectral Solutionssticker592100% (1)
- Selected Solutions To Linear Algebra Done WrongDocument21 pagesSelected Solutions To Linear Algebra Done WrongasdfPas encore d'évaluation
- Chapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesDocument9 pagesChapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesHafeezul RaziqPas encore d'évaluation
- Cgnotes PDFDocument11 pagesCgnotes PDFBijaya PandeyPas encore d'évaluation
- Lec10 PDFDocument5 pagesLec10 PDFVikasPas encore d'évaluation
- Numerical Solution of Linear Systems: Chen GreifDocument59 pagesNumerical Solution of Linear Systems: Chen GreifSadek AhmedPas encore d'évaluation
- Theorist's Toolkit Lecture 8: High Dimensional Geometry and Geometric Random WalksDocument8 pagesTheorist's Toolkit Lecture 8: High Dimensional Geometry and Geometric Random WalksJeremyKunPas encore d'évaluation
- Putnam Linear AlgebraDocument6 pagesPutnam Linear AlgebrainfinitesimalnexusPas encore d'évaluation
- Econ 2001Document35 pagesEcon 2001Sebastián Carrillo SantanaPas encore d'évaluation
- Final SolnsDocument3 pagesFinal Solnswilliam garciaPas encore d'évaluation
- Stability I: Equilibrium PointsDocument34 pagesStability I: Equilibrium PointsChâu Thành ĐạtPas encore d'évaluation
- Approximate Solutions To DSGE Models - An Application To The RBC ModelDocument27 pagesApproximate Solutions To DSGE Models - An Application To The RBC ModelAmil MusovicPas encore d'évaluation
- Lagrange Multipliers Can Fail To Determine Extrema: AcknowledgmentDocument3 pagesLagrange Multipliers Can Fail To Determine Extrema: Acknowledgmentarvind lakshmi ranjanPas encore d'évaluation
- Some Basics of Matrix Calculation: Ij N, K I, J 1Document3 pagesSome Basics of Matrix Calculation: Ij N, K I, J 1b00kb00kPas encore d'évaluation
- Kesavan NewDocument20 pagesKesavan NewPulkit SaxenaPas encore d'évaluation
- 6.4 Krylov Subspaces and Conjugate GradientsDocument11 pages6.4 Krylov Subspaces and Conjugate GradientsEfstathios SiampisPas encore d'évaluation
- 1 A Note On Spectral Theory: TMA 401/MAN 670 Functional Analysis 2003/2004Document10 pages1 A Note On Spectral Theory: TMA 401/MAN 670 Functional Analysis 2003/2004andresPas encore d'évaluation
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesD'EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesPas encore d'évaluation
- WSC2022 WSOS17 Web TechnologiesDocument8 pagesWSC2022 WSOS17 Web TechnologiesRONALD MOIS�S GARCIA LICASPas encore d'évaluation
- Business Analyst JobDocument9 pagesBusiness Analyst JobEdmond KeraPas encore d'évaluation
- CRMDocument41 pagesCRMjeebala100% (1)
- Elad FDM S-3: Yours To BuyDocument66 pagesElad FDM S-3: Yours To BuyMaki MajomPas encore d'évaluation
- A Benchmark of Dual Constellations GNSS Solutions For Vehicle Localization in Container TerminalsDocument7 pagesA Benchmark of Dual Constellations GNSS Solutions For Vehicle Localization in Container TerminalsjfrasconPas encore d'évaluation
- Gayanes PDFDocument234 pagesGayanes PDFLyanne VelascoPas encore d'évaluation
- Combined System For Seismics & Electrical Imaging Series 16SG24-NDocument2 pagesCombined System For Seismics & Electrical Imaging Series 16SG24-NdurvalPas encore d'évaluation
- Mecapion Servo Motors 2012Document68 pagesMecapion Servo Motors 2012GianLucaPas encore d'évaluation
- Opical Tranducer MaualDocument40 pagesOpical Tranducer MaualhemantecPas encore d'évaluation
- Hướng Dẫn Web Design and DevelopmentDocument4 pagesHướng Dẫn Web Design and DevelopmentCONFESSIONS ADMINPas encore d'évaluation
- Isilon OneFS 8.2.1 HDFS Reference GuideDocument49 pagesIsilon OneFS 8.2.1 HDFS Reference GuideMohit GautamPas encore d'évaluation
- Pre-Feasibility Study: A M I N G O N EDocument25 pagesPre-Feasibility Study: A M I N G O N ESULTANMEHBOOB0% (1)
- 06 Handout 119Document4 pages06 Handout 119Ivan HabocPas encore d'évaluation
- Auto Cad Civil 3 D ManualDocument23 pagesAuto Cad Civil 3 D ManualTofanKurniawanPas encore d'évaluation
- PDF Dis StandardsDocument35 pagesPDF Dis StandardsEdén PastoraPas encore d'évaluation
- Kingfisher CRMDocument6 pagesKingfisher CRMAjit KanojiaPas encore d'évaluation
- Sample DBDocument21 pagesSample DBDinesh YepuruPas encore d'évaluation
- Strategic - Power ControlDocument2 pagesStrategic - Power Controlangga measPas encore d'évaluation
- NPD 5001 POE Data Sheet Enus InyectorDocument2 pagesNPD 5001 POE Data Sheet Enus InyectorcuePas encore d'évaluation
- Types of KeyDocument6 pagesTypes of KeyRamya sriPas encore d'évaluation
- Extreme Privacy: Personal Data Removal Workbook & Credit Freeze GuideDocument36 pagesExtreme Privacy: Personal Data Removal Workbook & Credit Freeze Guideblacksun_moon100% (2)
- EEE Department Brochure - 02.04-1Document3 pagesEEE Department Brochure - 02.04-1Sivaraman PandarinathanPas encore d'évaluation
- The Porter Patterns - Business Strategy Design PatternsDocument26 pagesThe Porter Patterns - Business Strategy Design PatternsInformation should be FREEPas encore d'évaluation
- 2G Flexi EdgeDocument137 pages2G Flexi EdgeBaleanu SilviuPas encore d'évaluation
- Olidworks: S Edrawings ProfessionalDocument2 pagesOlidworks: S Edrawings Professionalkambera2100% (1)
- Material de Referencia - IT4IT™ Foundation Study GuideDocument176 pagesMaterial de Referencia - IT4IT™ Foundation Study Guidedagomez2013Pas encore d'évaluation
- COP User Manual 2.0 PDFDocument5 pagesCOP User Manual 2.0 PDFخالدعبدالله100% (1)
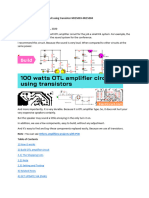
- 100 Watts OTL Amplifier Circuit Using Transistor MJ15003Document7 pages100 Watts OTL Amplifier Circuit Using Transistor MJ15003metinprivat01Pas encore d'évaluation
- Dell Inspiron 15r 5521 QuoteDocument4 pagesDell Inspiron 15r 5521 QuoteAnush PremPas encore d'évaluation
- Test Class MethodsDocument7 pagesTest Class Methodsvarun.chintatiPas encore d'évaluation