Vous aimerez peut-être aussi
- Learning The Pandas Library Python Tools For Data Munging Analysis and Visual PDFDocument208 pagesLearning The Pandas Library Python Tools For Data Munging Analysis and Visual PDFAlicia Brett100% (11)
- Field Extensions Splitting Field and Perfect FieldsDocument18 pagesField Extensions Splitting Field and Perfect FieldsAyush BhadauriaPas encore d'évaluation
- Sonnet (18) : Shall I Compare TheeDocument28 pagesSonnet (18) : Shall I Compare Theesarah100% (1)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationD'EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationPas encore d'évaluation
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960D'EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Pas encore d'évaluation
- Eed 105 Unit 1 Teaching Science in The Elementary Grades Physics Earth and Space ScienceDocument21 pagesEed 105 Unit 1 Teaching Science in The Elementary Grades Physics Earth and Space ScienceReyjen Shaira Dizon CamagayPas encore d'évaluation
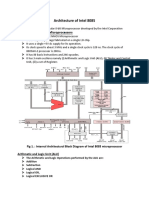
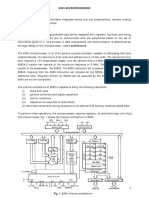
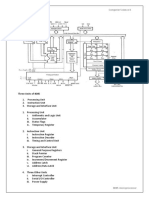
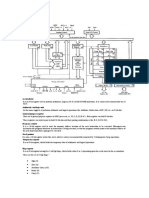
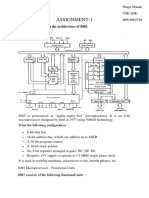
- The 8085 Microprocessor ArchitectureDocument12 pagesThe 8085 Microprocessor ArchitectureBernard MunyithyaPas encore d'évaluation
- Notes For StudentsDocument29 pagesNotes For StudentsAnif Ilham IsmailPas encore d'évaluation
- 8085 ArchitectureDocument31 pages8085 Architecturevellore gatewayPas encore d'évaluation
- Micrprocessor Notes 2023Document18 pagesMicrprocessor Notes 2023GautamPas encore d'évaluation
- FMM Unit-1Document28 pagesFMM Unit-1CS EPas encore d'évaluation
- 8085 Architecture & Pin DescriptionFileDocument19 pages8085 Architecture & Pin DescriptionFileKaseya TakahashiPas encore d'évaluation
- 8085 MicroprocessorDocument25 pages8085 Microprocessorprofessor2062Pas encore d'évaluation
- Organization of Intel 8085Document6 pagesOrganization of Intel 8085Athiesh KumarPas encore d'évaluation
- Microprocessor 8085 Architecture: 3.2 Block Diagram of 8085Document16 pagesMicroprocessor 8085 Architecture: 3.2 Block Diagram of 8085Kannan Muthusamy100% (1)
- Micro Processor DineshDocument9 pagesMicro Processor DineshsandyPas encore d'évaluation
- Microprocessor - 8085 Architecture - TutorialspointDocument3 pagesMicroprocessor - 8085 Architecture - TutorialspointRajat RajPas encore d'évaluation
- Intro To 8085Document43 pagesIntro To 8085Elisha NdhlovuPas encore d'évaluation
- Microprocessor - 8085 ArchitectureDocument3 pagesMicroprocessor - 8085 ArchitectureN.D.SurendharPas encore d'évaluation
- Experiment No. 1: Department of Electronics & Comm - EnggDocument7 pagesExperiment No. 1: Department of Electronics & Comm - EnggJaspreet KaurPas encore d'évaluation
- Intel 8085 ArchitectureDocument8 pagesIntel 8085 ArchitectureAravind VJPas encore d'évaluation
- 8085 Microprocessor Architecture, Pin DiagramDocument10 pages8085 Microprocessor Architecture, Pin DiagramSachin Jaysenan0% (1)
- Microprocessor - 8085 ArchitectureDocument3 pagesMicroprocessor - 8085 ArchitectureAlok AnkitPas encore d'évaluation
- Experiment 1 4 SemesterDocument6 pagesExperiment 1 4 Semesteraman YadavPas encore d'évaluation
- Unit I PDFDocument25 pagesUnit I PDFSomnath2014Pas encore d'évaluation
- Unit 1Document78 pagesUnit 1Vasunthara DPas encore d'évaluation
- 3-Ee8551-Microprocessors and MicrocontrollersDocument109 pages3-Ee8551-Microprocessors and MicrocontrollersKeerthana SahadevanPas encore d'évaluation
- CN 320: Microprocessor and Microcontroller SystemsDocument40 pagesCN 320: Microprocessor and Microcontroller SystemsAlango Jr TzPas encore d'évaluation
- MPDocument34 pagesMPAbhinandan JainPas encore d'évaluation
- MCT Unit 2Document26 pagesMCT Unit 2Aravind RajPas encore d'évaluation
- Lecture1423722820 PDFDocument101 pagesLecture1423722820 PDFdavPas encore d'évaluation
- Microprocessor - 8085 Architecture - TutorialspointDocument3 pagesMicroprocessor - 8085 Architecture - TutorialspointAmith DhagePas encore d'évaluation
- 8085 Features, Signal DescriptionDocument13 pages8085 Features, Signal DescriptionRakesh Kumar DPas encore d'évaluation
- M4 Yash AllabadiDocument6 pagesM4 Yash Allabadidegijon661Pas encore d'évaluation
- 8085 PDocument31 pages8085 PAnish ChibPas encore d'évaluation
- 8085 Microprocessor ArchitectureDocument3 pages8085 Microprocessor Architecturetguna21Pas encore d'évaluation
- Syllabus: 8085 ArchitectureDocument25 pagesSyllabus: 8085 Architecturetamilvendhan87Pas encore d'évaluation
- Ee 309 M1Document7 pagesEe 309 M1Basheer V.PPas encore d'évaluation
- 8085 Is Pronounced AsDocument9 pages8085 Is Pronounced AsArbaaz khan786Pas encore d'évaluation
- Cs 2 12th ExperimentDocument73 pagesCs 2 12th ExperimentShubham0% (1)
- 8085 MicroprocessorDocument13 pages8085 MicroprocessorSajid Akram100% (1)
- C5 - Intro To 8085 - Hardware PDFDocument39 pagesC5 - Intro To 8085 - Hardware PDFsiti hajarPas encore d'évaluation
- Unit Ii 8085 Micro Processor 8085 Architecture:: ME 6702 Mechatronics Mechanical Engineering 2019-20Document26 pagesUnit Ii 8085 Micro Processor 8085 Architecture:: ME 6702 Mechatronics Mechanical Engineering 2019-20GopinathPas encore d'évaluation
- 8085 Microprocessor - Functional Units: AccumulatorDocument3 pages8085 Microprocessor - Functional Units: AccumulatorANKIT SHARMAPas encore d'évaluation
- Ece 8085 MicroprocessorDocument26 pagesEce 8085 Microprocessorgourav VermaPas encore d'évaluation
- Microprocessor NotesDocument60 pagesMicroprocessor NotesVijay KumarPas encore d'évaluation
- 8085 MaterialDocument12 pages8085 MaterialsameerPas encore d'évaluation
- 8085 Microprocessor - Block DiagramDocument5 pages8085 Microprocessor - Block DiagramShreyash ShindePas encore d'évaluation
- EE6502 MPMC Two Marks With AnswerDocument10 pagesEE6502 MPMC Two Marks With Answervlsimani9110100% (1)
- Exp 1 Induction To 8085 Micro PDocument10 pagesExp 1 Induction To 8085 Micro Phardik ChanderaPas encore d'évaluation
- Intel 8085 Architecture: AccumulatorDocument6 pagesIntel 8085 Architecture: AccumulatorDipesh YadavPas encore d'évaluation
- Introduction To Microprocessor 8085Document23 pagesIntroduction To Microprocessor 8085GousAttarPas encore d'évaluation
- MPMC Assignment-1Document7 pagesMPMC Assignment-113Panya CSE2Pas encore d'évaluation
- Microprocessor - 8085 ArchitectureDocument4 pagesMicroprocessor - 8085 ArchitectureLithika RameshPas encore d'évaluation
- Microprocessor Ramesh S GaonkarDocument25 pagesMicroprocessor Ramesh S GaonkarAbraiz Khan KhattakPas encore d'évaluation
- 8085Document56 pages8085Kunal MeherPas encore d'évaluation
- Internal Arch of 8085Document22 pagesInternal Arch of 8085Prisly Mary JacobPas encore d'évaluation
- 8085 Microprocessor - Functional Units: AccumulatorDocument5 pages8085 Microprocessor - Functional Units: AccumulatorDeep KamblePas encore d'évaluation
- 8085 ArchitectureDocument38 pages8085 ArchitectureReethu ParavadaPas encore d'évaluation
- MPI (Slides 8085 Microprocessor)Document20 pagesMPI (Slides 8085 Microprocessor)Rosh_MiPas encore d'évaluation
- Programming With 8085 MicroprocessorDocument33 pagesProgramming With 8085 MicroprocessorBlackk SpydoPas encore d'évaluation
- Chapter 3Document16 pagesChapter 3زياد عبدالله عبدالحميدPas encore d'évaluation
- 8085 Microprocessor - Functional Units: AccumulatorDocument20 pages8085 Microprocessor - Functional Units: AccumulatorCarlnagum 123456789Pas encore d'évaluation
- Applied Statistics PDFDocument417 pagesApplied Statistics PDFram singhPas encore d'évaluation
- Auditory Scene Analysis - The Perceptual Organization of Sound - Albert S BregmanDocument854 pagesAuditory Scene Analysis - The Perceptual Organization of Sound - Albert S BregmanRodolfo RomeroPas encore d'évaluation
- Grammar Review - ModalsDocument3 pagesGrammar Review - ModalssasaemPas encore d'évaluation
- Blocking and Nonblocking in VerilogDocument3 pagesBlocking and Nonblocking in VerilogJose AudrinesPas encore d'évaluation
- Genre Analysis AssignmentDocument1 pageGenre Analysis AssignmentWill KurlinkusPas encore d'évaluation
- Script FatimahDocument2 pagesScript FatimahAdetya Duta PratamaPas encore d'évaluation
- May and Might: WRITE: Dance - Drive A Car - Fly - Play The Guitar - Ride A Bike - Run - Speak English - SwimDocument3 pagesMay and Might: WRITE: Dance - Drive A Car - Fly - Play The Guitar - Ride A Bike - Run - Speak English - SwimoscaryligiaPas encore d'évaluation
- SOP05-5002F ProLYTE Service Manual Rev 00 Eff 01-19-07Document41 pagesSOP05-5002F ProLYTE Service Manual Rev 00 Eff 01-19-07ASr AsrPas encore d'évaluation
- Syllogisms & Propositional Logic - Brief Theory NotesDocument4 pagesSyllogisms & Propositional Logic - Brief Theory NotesMana GargiPas encore d'évaluation
- Manual Novus n1200Document12 pagesManual Novus n1200Aldrin HernandezPas encore d'évaluation
- Approaches To Curriculum DesignDocument2 pagesApproaches To Curriculum DesignRuth Amelia Munthe100% (3)
- Sijil Berhenti Ting.5 2018Document2 pagesSijil Berhenti Ting.5 2018subramaniam perinanPas encore d'évaluation
- Project Number: A3179 Composite Text Video Display: Theory of OperationDocument5 pagesProject Number: A3179 Composite Text Video Display: Theory of OperationNilav ChokshiPas encore d'évaluation
- Narendra ModiDocument14 pagesNarendra ModiRituparna ChatterjeePas encore d'évaluation
- PCO2Document55 pagesPCO2cesar luis gonzalez rodriguez100% (1)
- Akar Resume 18 01Document1 pageAkar Resume 18 01AaryanPas encore d'évaluation
- Pair of Linear EquationDocument10 pagesPair of Linear EquationSakshamPas encore d'évaluation
- 09CriticPsychol 21 Sullivan Critical Psychology of Pride IJCPDocument12 pages09CriticPsychol 21 Sullivan Critical Psychology of Pride IJCPLoredana MicuPas encore d'évaluation
- ANIMELYRICSDocument35 pagesANIMELYRICSLeah ArnaezPas encore d'évaluation
- Trabajo de Ingles Verbos Revisados Por Francis 2Document6 pagesTrabajo de Ingles Verbos Revisados Por Francis 2Maria Fernanda Parra CardenasPas encore d'évaluation
- Upsc History Question Bank - Scorer Series For Ias Prelims Csat Paper-I Compiled by Civil Services Toppers (Publishers Rainbow)Document736 pagesUpsc History Question Bank - Scorer Series For Ias Prelims Csat Paper-I Compiled by Civil Services Toppers (Publishers Rainbow)Mangesh VitekarPas encore d'évaluation
- Cambridge International AS & A Level: Computer Science 9618/22Document94 pagesCambridge International AS & A Level: Computer Science 9618/22akpavanPas encore d'évaluation
- A Preliminary Inventory of The Arabic HermeticaDocument2 pagesA Preliminary Inventory of The Arabic HermeticaRick RockPas encore d'évaluation
- 2023 Crow Summer InstituteDocument1 page2023 Crow Summer InstituteNBC MontanaPas encore d'évaluation
- Base and SuperstructureDocument11 pagesBase and SuperstructureMarcelo Sanhueza0% (1)
- Chapter 1Document5 pagesChapter 1Rithu Raj HariPas encore d'évaluation