Vous aimerez peut-être aussi
- Textbook ArchiveDocument3 pagesTextbook ArchiveLouie LawPas encore d'évaluation
- AEG GC F04 Contactors-SoftStartersDocument58 pagesAEG GC F04 Contactors-SoftStartersAnggoro YNPas encore d'évaluation
- Electrical Print Reading TrainingDocument0 pageElectrical Print Reading TrainingEddy Fernando Queca CadizPas encore d'évaluation
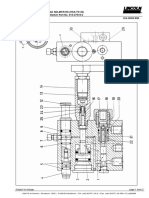
- Nachi HydraulicDocument32 pagesNachi Hydraulictanha56313955Pas encore d'évaluation
- Photoelasticity ManualDocument31 pagesPhotoelasticity ManualhimanshusekharpandaPas encore d'évaluation
- Experimental Design Graphic OrganizerDocument2 pagesExperimental Design Graphic OrganizerApplesauce90Pas encore d'évaluation
- 615-27518-2 Wide-Angle Spray Nozzle Model SDLMKR-ES HSA-TD 25Document2 pages615-27518-2 Wide-Angle Spray Nozzle Model SDLMKR-ES HSA-TD 25Reza bostanianPas encore d'évaluation
- ManualDocument362 pagesManualBladyMaitaCiprianoPas encore d'évaluation
- VFD Wiring Best Practices - AP040076EN PDFDocument5 pagesVFD Wiring Best Practices - AP040076EN PDFIsmael Ochoa JimenezPas encore d'évaluation
- Ac Motors EbookDocument74 pagesAc Motors EbookHammad MalikPas encore d'évaluation
- Induction Motor Design PDFDocument46 pagesInduction Motor Design PDFdiptiPas encore d'évaluation
- GalviDocument41 pagesGalvidhanishlPas encore d'évaluation
- Profibus DP - Technical Presentation enDocument32 pagesProfibus DP - Technical Presentation enRicardoPas encore d'évaluation
- Ansi-Nema MG 1-2003, Revision 1-2004Document584 pagesAnsi-Nema MG 1-2003, Revision 1-2004manuelro7450% (2)
- VFD Basics: How to Combat Heat Loss and Harmonics From Variable Frequency DrivesDocument5 pagesVFD Basics: How to Combat Heat Loss and Harmonics From Variable Frequency DrivesgachaturPas encore d'évaluation
- VSC Product Introduction-EnDocument36 pagesVSC Product Introduction-EnAldeni Prima AnugrahPas encore d'évaluation
- Electrical Drives - Understanding BasicsDocument17 pagesElectrical Drives - Understanding Basicsamirali55Pas encore d'évaluation
- NM20 Flyer 08 2012 PDFDocument12 pagesNM20 Flyer 08 2012 PDFandy175Pas encore d'évaluation
- MEP 003A Dual With Trailer Organizational Intermediate Direct Support and General Support Maintenance Repair Parts and Special Tools List TM 5 6115 633 14& PDocument160 pagesMEP 003A Dual With Trailer Organizational Intermediate Direct Support and General Support Maintenance Repair Parts and Special Tools List TM 5 6115 633 14& PGreenMountainGenerators100% (1)
- Demag DC-Com Chain HoistDocument4 pagesDemag DC-Com Chain Hoistmuhamedz100% (1)
- Relay NM 10Document8 pagesRelay NM 10Ayahnya Rizla Atha RayyanPas encore d'évaluation
- Brochure JeumontDocument20 pagesBrochure JeumontMarioPas encore d'évaluation
- GEB161.1E Manuel Technique en PDFDocument34 pagesGEB161.1E Manuel Technique en PDFe-genieclimatique.comPas encore d'évaluation
- EMI Emissions of Modern PWM AC DrivesDocument59 pagesEMI Emissions of Modern PWM AC DrivesMarcelo IpolitoPas encore d'évaluation
- Agrawal 06 PDFDocument74 pagesAgrawal 06 PDFaniPas encore d'évaluation
- Explosion Proof Motor CatalogDocument152 pagesExplosion Proof Motor CatalogBudy AndikaPas encore d'évaluation
- Motor Fuse 20 StartersDocument10 pagesMotor Fuse 20 StartersArturo Isidro Conde PérezPas encore d'évaluation
- Brake Res CalcDocument4 pagesBrake Res CalcDwiMaryantoPas encore d'évaluation
- Ifm Vibration Monitoring Industry 4 Point 0 SE PDFDocument24 pagesIfm Vibration Monitoring Industry 4 Point 0 SE PDFMartins SpamamPas encore d'évaluation
- Cycloconverters TopologiesDocument12 pagesCycloconverters Topologiesjuan_fimPas encore d'évaluation
- Centralized Lubrication SystemsDocument12 pagesCentralized Lubrication SystemsroquirogaPas encore d'évaluation
- Control Circuit Wiring Variador V1000 YaskawaDocument8 pagesControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezPas encore d'évaluation
- Brake Operation and Load Limits for Flameproof MotorsDocument2 pagesBrake Operation and Load Limits for Flameproof MotorsRkantvyas100% (1)
- White Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2Document13 pagesWhite Paper - A Comparison of The Characteristics of AC and DC Motors - B7096-2tekhakkoPas encore d'évaluation
- Rockerbogie Mechanism Blackbook DataDocument42 pagesRockerbogie Mechanism Blackbook Dataharshal kaduPas encore d'évaluation
- Operating Temperature Within LV Switchgear - EEPDocument6 pagesOperating Temperature Within LV Switchgear - EEPSundaresan SabanayagamPas encore d'évaluation
- Vibration Monitoring For Fault Motors Diagnosis PDFDocument8 pagesVibration Monitoring For Fault Motors Diagnosis PDFuuur35100% (1)
- Motor Thermal Capacity Used - How Does The Relay Know PDFDocument14 pagesMotor Thermal Capacity Used - How Does The Relay Know PDFdusktodawnPas encore d'évaluation
- Plain Bearing Technology: Plain Bearings Type ZDocument20 pagesPlain Bearing Technology: Plain Bearings Type ZAlex SeguidaPas encore d'évaluation
- G1 - Introduction Generator ProtectionDocument21 pagesG1 - Introduction Generator ProtectionOoi Ban JuanPas encore d'évaluation
- Overcurrent Coordination Setting Guidelines TransformersDocument7 pagesOvercurrent Coordination Setting Guidelines TransformersrobertoseniorPas encore d'évaluation
- Overcurrent Coordination Setting Guidelines CapacitorsDocument4 pagesOvercurrent Coordination Setting Guidelines CapacitorsrobertoseniorPas encore d'évaluation
- Motor Installation and Maintenance ManualDocument23 pagesMotor Installation and Maintenance ManualVenkat CherukuriPas encore d'évaluation
- ArticleDocument135 pagesArticlefarhan rajib100% (1)
- A Guide To Electric Drives and DC Motor ControlDocument8 pagesA Guide To Electric Drives and DC Motor ControlArunkumar Nambiraju100% (1)
- Mechatronics in Rotating MachineryDocument16 pagesMechatronics in Rotating MachineryPiotr PietrzakPas encore d'évaluation
- Generator TheoryDocument4 pagesGenerator TheoryRachit KhannaPas encore d'évaluation
- Three Phase Induction Motor ExperimentDocument21 pagesThree Phase Induction Motor ExperimentKarthik GanjiPas encore d'évaluation
- Module 3 QsDocument44 pagesModule 3 QsSatishReddyPas encore d'évaluation
- m3820, Manual Sqc2Document24 pagesm3820, Manual Sqc2CésarRenatoCopacondoriCuaylaPas encore d'évaluation
- White Paper Advanced Motor Protection Option 06-2019Document9 pagesWhite Paper Advanced Motor Protection Option 06-2019amirhajianPas encore d'évaluation
- IDAC Wheel Slip Control System Manual SectionDocument6 pagesIDAC Wheel Slip Control System Manual SectionJustin Hernandez100% (1)
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- Hydraulic Mining Excavator Electrical Drawings and Component DescriptionsDocument19 pagesHydraulic Mining Excavator Electrical Drawings and Component DescriptionsWillian Ticlia RuizPas encore d'évaluation
- 1N1LG02 0 Liquid Starter Interlocking CheckList 1N1R042Document23 pages1N1LG02 0 Liquid Starter Interlocking CheckList 1N1R042Spellcaster0% (1)
- DC Machine MaintenanceDocument5 pagesDC Machine MaintenancejmsangriaPas encore d'évaluation
- Utilization of ElectricalDocument421 pagesUtilization of ElectricalSuma SumalathaPas encore d'évaluation
- Nonlinear Rotordynamics of A MDOF Rotor-Stator Contact System Subjected To Frictional and Gravitational EffectsDocument31 pagesNonlinear Rotordynamics of A MDOF Rotor-Stator Contact System Subjected To Frictional and Gravitational EffectsIoannis GavalasPas encore d'évaluation
- Mechanical Systems and Signal Processing: Jie Hong, Pingchao Yu, Dayi Zhang, Yanhong MaDocument19 pagesMechanical Systems and Signal Processing: Jie Hong, Pingchao Yu, Dayi Zhang, Yanhong MaSandeep186Pas encore d'évaluation
- Fast Algorithm Estimating The Jeffcott Cracked Rotor Dynamics and Stiffness VariationDocument10 pagesFast Algorithm Estimating The Jeffcott Cracked Rotor Dynamics and Stiffness VariationgomezPas encore d'évaluation
- 2021-Chipato,Friswell-Nonlinear Rotordynamics of a MDOF rotor-statorDocument18 pages2021-Chipato,Friswell-Nonlinear Rotordynamics of a MDOF rotor-statorAlex CooperPas encore d'évaluation
- Nonlinear Responses Analysis Caused by Slant Crack in A Rotor-Bearing SystemDocument19 pagesNonlinear Responses Analysis Caused by Slant Crack in A Rotor-Bearing SystemIago Alves PereiraPas encore d'évaluation
- Coupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsD'EverandCoupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsPas encore d'évaluation
- Galerkin's Method for Approximating Periodic Solutions of Nonlinear SystemsDocument33 pagesGalerkin's Method for Approximating Periodic Solutions of Nonlinear Systemstanha56313955Pas encore d'évaluation
- Airfoil AnalysisDocument38 pagesAirfoil Analysistanha56313955Pas encore d'évaluation
- Us 20170023020 A 1Document10 pagesUs 20170023020 A 1tanha56313955Pas encore d'évaluation
- Pipes Size Charts ASME B36.10 - 36.19 - ProjectmaterialsDocument19 pagesPipes Size Charts ASME B36.10 - 36.19 - Projectmaterialstanha56313955Pas encore d'évaluation
- Standard - Robotic & MicroDocument10 pagesStandard - Robotic & Microtanha56313955Pas encore d'évaluation
- Dynamic Analysis For Foundation of Vibrating EquipmentsDocument6 pagesDynamic Analysis For Foundation of Vibrating Equipmentstanha56313955Pas encore d'évaluation
- SAE 660 Bronze - Technical InformationDocument2 pagesSAE 660 Bronze - Technical Informationtanha56313955Pas encore d'évaluation
- Usb 4711a PDFDocument30 pagesUsb 4711a PDFtanha56313955Pas encore d'évaluation
- Manual Arduino UnoDocument8 pagesManual Arduino UnoNuwando IbrahimaPas encore d'évaluation
- Rtiwari RD Book 06c PDFDocument18 pagesRtiwari RD Book 06c PDFtanha56313955Pas encore d'évaluation
- Waukesha Bearings Flexure Pivot USDocument2 pagesWaukesha Bearings Flexure Pivot UStanha56313955Pas encore d'évaluation
- 11 791Document7 pages11 791tanha56313955Pas encore d'évaluation
- Brush CopperDocument5 pagesBrush Coppertanha56313955Pas encore d'évaluation
- Vulcan GoodDocument48 pagesVulcan Goodtanha56313955Pas encore d'évaluation
- AussieDocument95 pagesAussiepragthedogPas encore d'évaluation
- EP0272128A3Document2 pagesEP0272128A3tanha56313955Pas encore d'évaluation
- Us 3871311Document4 pagesUs 3871311tanha56313955Pas encore d'évaluation
- HD 13 Numerical Integration of MDOF 2008Document18 pagesHD 13 Numerical Integration of MDOF 2008tanha56313955Pas encore d'évaluation
- B 10655074Document42 pagesB 10655074tanha56313955Pas encore d'évaluation
- Hole PreparationDocument3 pagesHole Preparationtanha56313955Pas encore d'évaluation
- Proposal To The TAMU TurbomachineryDocument2 pagesProposal To The TAMU Turbomachinerytanha56313955Pas encore d'évaluation
- 77561934Document95 pages77561934tanha56313955Pas encore d'évaluation
- Whirl Motion of A Seal Test Rig With Squeeze Film Dampers Gunter Proctor Vibration Inst 2007Document12 pagesWhirl Motion of A Seal Test Rig With Squeeze Film Dampers Gunter Proctor Vibration Inst 2007tanha56313955Pas encore d'évaluation
- Hole PreparationDocument3 pagesHole Preparationtanha56313955Pas encore d'évaluation
- Standars - AVR Designer and AnalystDocument26 pagesStandars - AVR Designer and Analysttanha56313955Pas encore d'évaluation
- KalmanDocument34 pagesKalmanbilal309Pas encore d'évaluation
- Standard - Robotic & MicroDocument10 pagesStandard - Robotic & Microtanha56313955Pas encore d'évaluation
- LP - SAS Congruence Postulates Julius EDocument9 pagesLP - SAS Congruence Postulates Julius EJoel BulawanPas encore d'évaluation
- Introduction To The Philosophy of The Human Person: Prudence and Frugality Towards The EnvironmentDocument14 pagesIntroduction To The Philosophy of The Human Person: Prudence and Frugality Towards The EnvironmentPril Gueta100% (1)
- The Modern Corsair Issue #3Document35 pagesThe Modern Corsair Issue #3TheModernCorsair100% (2)
- Guido Adler: 1.2 A Pioneer of MusicologyDocument3 pagesGuido Adler: 1.2 A Pioneer of MusicologyAnonymous J5vpGuPas encore d'évaluation
- Contoh Proposal The Implementation KTSP PDFDocument105 pagesContoh Proposal The Implementation KTSP PDFdefryPas encore d'évaluation
- Report in Project Team BuildingDocument43 pagesReport in Project Team BuildingHarold TaylorPas encore d'évaluation
- What Is SociolinguisticsDocument3 pagesWhat Is SociolinguisticsRahma BouaitaPas encore d'évaluation
- Biodiversity Has Emerge As A Scientific Topic With A High Degree of Social Prominence and Consequently of Political ImportantDocument5 pagesBiodiversity Has Emerge As A Scientific Topic With A High Degree of Social Prominence and Consequently of Political ImportantFatin SakuraPas encore d'évaluation
- Grecian Urn PaperDocument2 pagesGrecian Urn PaperrhesajanubasPas encore d'évaluation
- Medisys Corp.: The Intenscare Product Development Team: Submitted By: Vanila Mehta P40049Document2 pagesMedisys Corp.: The Intenscare Product Development Team: Submitted By: Vanila Mehta P40049Amit DalalPas encore d'évaluation
- Effective Teaching and Learning - Skinner, DonDocument196 pagesEffective Teaching and Learning - Skinner, DonKamal VermaPas encore d'évaluation
- Foundations of Qualitative Research: Orientations to MeaningDocument23 pagesFoundations of Qualitative Research: Orientations to MeaningKrishnaveni KPas encore d'évaluation
- Posted: 2012/06/17 - Author: Amarashiki - Filed Under: Physmatics, Relativity - Tags: Physmatics, Relativity - Leave A CommentDocument5 pagesPosted: 2012/06/17 - Author: Amarashiki - Filed Under: Physmatics, Relativity - Tags: Physmatics, Relativity - Leave A CommentAlfigueroaPas encore d'évaluation
- Scion - AyllusDocument30 pagesScion - AyllusLivio Quintilio GlobuloPas encore d'évaluation
- Safety Induction Post Test Answer Sheet: Name: Nexus: Score: Instructor: DateDocument1 pageSafety Induction Post Test Answer Sheet: Name: Nexus: Score: Instructor: DateJunard Lu HapPas encore d'évaluation
- Ladder paradox resolved by relativity of simultaneityDocument11 pagesLadder paradox resolved by relativity of simultaneityperception888Pas encore d'évaluation
- Tesol Video QuestionsDocument3 pagesTesol Video QuestionsŁéī ŸáhPas encore d'évaluation
- The SAGE Handbook of Play and Learning in Early ChildhoodDocument10 pagesThe SAGE Handbook of Play and Learning in Early ChildhoodANGELICA ALEJANDRA MORENO CONTEREASPas encore d'évaluation
- The Characteristics of NewsDocument1 pageThe Characteristics of NewsMerrian SibolinaoPas encore d'évaluation
- Mehreen Murtaza: SITAC X (10th International Symposium On Contemporary Art Theory) The Future: The Long Count Begins Again, Mexico CityDocument13 pagesMehreen Murtaza: SITAC X (10th International Symposium On Contemporary Art Theory) The Future: The Long Count Begins Again, Mexico CityMehreen MurtazaPas encore d'évaluation
- DO - PERDEV 11 - Q1 - Mod2Document10 pagesDO - PERDEV 11 - Q1 - Mod2RubenPas encore d'évaluation
- VK Shape Surface KaDocument8 pagesVK Shape Surface KamatthiessamPas encore d'évaluation
- Chapter 1. The First Law of Thermodynamics For Close System Key Learning OutcomesDocument16 pagesChapter 1. The First Law of Thermodynamics For Close System Key Learning OutcomesLi BushPas encore d'évaluation
- SCDL Project GuidelinessDocument12 pagesSCDL Project GuidelinessveereshkoutalPas encore d'évaluation
- Brock, Roger-Greek Political Imagery From Homer To Aristotle-Bloomsbury Academic (2013)Document273 pagesBrock, Roger-Greek Political Imagery From Homer To Aristotle-Bloomsbury Academic (2013)juanemmma100% (1)
- The Egyptian Heritage in The Ancient Measurements of The EarthDocument14 pagesThe Egyptian Heritage in The Ancient Measurements of The Earthkhafre100% (1)
- Spread SstenoDocument37 pagesSpread SstenokanchanPas encore d'évaluation
- Analysis of Chapters 1-3 in A Separate PeaceDocument31 pagesAnalysis of Chapters 1-3 in A Separate PeaceMarlo ChismPas encore d'évaluation
- Song of Songs of SolomonDocument103 pagesSong of Songs of SolomonAndré Rademacher100% (3)