Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Administrative - Master Syllabus: Cover SheetDocument7 pagesAdministrative - Master Syllabus: Cover Sheetadd313199Pas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Alg 2 Resource Ws CH 2 PDFDocument101 pagesAlg 2 Resource Ws CH 2 PDFAnoop Sreedhar100% (3)
- (Sheldon Axler) Linear Algebra Done Right Ch01 EspaciosVectorialesDocument20 pages(Sheldon Axler) Linear Algebra Done Right Ch01 EspaciosVectorialesCarlos Orlando Solórzano VillalbaPas encore d'évaluation
- Present ContinuousDocument3 pagesPresent Continuousadd313199Pas encore d'évaluation
- NLMS Adaptive Beamforming Algorithm For Smart Antenna: Mokpo National University, South KoreaDocument4 pagesNLMS Adaptive Beamforming Algorithm For Smart Antenna: Mokpo National University, South Koreaadd313199Pas encore d'évaluation
- MATLAB Simulation Comparison For Different Adaptive Noise Cancelation AlgorithmsDocument6 pagesMATLAB Simulation Comparison For Different Adaptive Noise Cancelation Algorithmsadd313199Pas encore d'évaluation
- MATLAB Simulation Comparison For Different Adaptive Noise Cancelation AlgorithmsDocument6 pagesMATLAB Simulation Comparison For Different Adaptive Noise Cancelation Algorithmsadd313199Pas encore d'évaluation
- ProblemsDocument6 pagesProblemsadd313199Pas encore d'évaluation
- Delay ChartsDocument9 pagesDelay Chartsadd313199Pas encore d'évaluation
- Mobile Routing: Basic Notions of MobilityDocument14 pagesMobile Routing: Basic Notions of Mobilityadd313199Pas encore d'évaluation
- Data PenjualanDocument8 pagesData PenjualanK PPas encore d'évaluation
- Lecture Notes (Chapter 1.4 Chain Rule)Document3 pagesLecture Notes (Chapter 1.4 Chain Rule)Ammar WahabPas encore d'évaluation
- NMTC-at-Junior-level-IX-X-Standards (Level2)Document6 pagesNMTC-at-Junior-level-IX-X-Standards (Level2)asha jalanPas encore d'évaluation
- Lesson 4 Exponential FunctionDocument38 pagesLesson 4 Exponential FunctionAlfred Fegalan100% (1)
- Digital Image Processing and ApplicationsDocument49 pagesDigital Image Processing and Applicationsdump mailPas encore d'évaluation
- Math 103: Final Exam Fall 2009Document5 pagesMath 103: Final Exam Fall 2009jelenicasabancicaPas encore d'évaluation
- Groups PDFDocument414 pagesGroups PDFArafat Hinju TzPas encore d'évaluation
- 수치해석 (절단오차와 테일러급수)Document31 pages수치해석 (절단오차와 테일러급수)김승민Pas encore d'évaluation
- Chapter 74 Volumes of Solids of Revolution: EXERCISE 288 Page 783Document12 pagesChapter 74 Volumes of Solids of Revolution: EXERCISE 288 Page 783chandima100% (1)
- Signal and System Interview QuestionsDocument8 pagesSignal and System Interview Questionsaishwarya100% (2)
- Scalar Product of VectorsDocument5 pagesScalar Product of VectorsSudibyo GunawanPas encore d'évaluation
- Spring Mass EffectDocument4 pagesSpring Mass EffectScott WhitmirePas encore d'évaluation
- Math4190 Lecture-04-02 HDocument11 pagesMath4190 Lecture-04-02 Hchandan.thakurPas encore d'évaluation
- Module 4Document17 pagesModule 4santosh gillPas encore d'évaluation
- 1 Gauss-Jordan LapenaDocument4 pages1 Gauss-Jordan LapenaLeandro LapeñaPas encore d'évaluation
- Prelim Exam - Jedidia Charles T. LamsenDocument3 pagesPrelim Exam - Jedidia Charles T. LamsenDark and BrightPas encore d'évaluation
- ErtDocument2 pagesErtChusnadiPas encore d'évaluation
- POLYNOMIALS - Page - 144 UPDATED PDFDocument869 pagesPOLYNOMIALS - Page - 144 UPDATED PDFKPOGLUPas encore d'évaluation
- Ece6255 L16Document71 pagesEce6255 L16Sai sarathPas encore d'évaluation
- Math Activities 11 20 Class Xii 2Document30 pagesMath Activities 11 20 Class Xii 2jamal ahmadPas encore d'évaluation
- Review:: Instruction: Given The Values of The Right Triangle As Shown (On Each Paper), Find The ValueDocument4 pagesReview:: Instruction: Given The Values of The Right Triangle As Shown (On Each Paper), Find The ValueDrew RoaPas encore d'évaluation
- Orthogonal Trajectories: Xyc FxycDocument14 pagesOrthogonal Trajectories: Xyc FxycManikyarajuPas encore d'évaluation
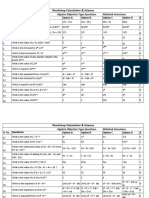
- WCS Algebra Objective Questions by Abhishek SrivastavaDocument3 pagesWCS Algebra Objective Questions by Abhishek Srivastava923 OM KUMARPas encore d'évaluation
- Inverse Problems, JosephKellerDocument12 pagesInverse Problems, JosephKellerAdam TuckerPas encore d'évaluation
- Chapter 5Document33 pagesChapter 5g77116370% (1)
- Sets MCQ 2Document3 pagesSets MCQ 2no namePas encore d'évaluation