Vous aimerez peut-être aussi
- 2do Examen Transf de CalorDocument6 pages2do Examen Transf de CalorEdgar Martinez100% (4)
- Como Hacer Un Viaje AstralDocument64 pagesComo Hacer Un Viaje AstralJudith MataPas encore d'évaluation
- Manejo de LCD y GLCDDocument18 pagesManejo de LCD y GLCDLuisHernandezPas encore d'évaluation
- Robot Sumo RCDocument15 pagesRobot Sumo RCangiePas encore d'évaluation
- Manual de RefrigeracionDocument287 pagesManual de RefrigeracionDiego Trinidad97% (58)
- Fluidos, Bombas e Instalaciones Hidráulicas (S. de Las Heras)Document415 pagesFluidos, Bombas e Instalaciones Hidráulicas (S. de Las Heras)leonardo_arévalo_2891% (11)
- Tesis Brazo RoboticoDocument60 pagesTesis Brazo RoboticoAlan RodriguezPas encore d'évaluation
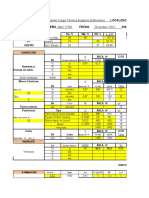
- Ejemplo Cálculo de Carga Térmica Método CLTDDocument14 pagesEjemplo Cálculo de Carga Térmica Método CLTDJorge Eduardo Granados Granados83% (6)
- Tesis Prototipo de Robot Móvil TeleoperadoDocument107 pagesTesis Prototipo de Robot Móvil TeleoperadoGerson DepablosPas encore d'évaluation
- Amplificador Operacional Inversor y No InversorDocument12 pagesAmplificador Operacional Inversor y No InversorJavier Apaez GaticaPas encore d'évaluation
- Ejercicios Resueltos PICCDocument13 pagesEjercicios Resueltos PICCSantiagoLozadaPas encore d'évaluation
- Importancia Del Punto de FusiónDocument2 pagesImportancia Del Punto de FusiónNicolas Nausa75% (4)
- Manual UMAG 2013 - REV.06 - EspañolDocument49 pagesManual UMAG 2013 - REV.06 - EspañolVíctor Barreto Vásquez100% (2)
- El EstañoDocument10 pagesEl EstañoMiguel CoitaPas encore d'évaluation
- Proyecto Brazo Robotico Con ElectroimanDocument8 pagesProyecto Brazo Robotico Con Electroimanjohn caceresPas encore d'évaluation
- Practica 2009 I - Raz LogicoDocument32 pagesPractica 2009 I - Raz LogicoVíctor Barreto Vásquez0% (1)
- Cinematica Directa e Inversa-2009Document64 pagesCinematica Directa e Inversa-2009Betoys58580100% (1)
- Fibra OpticaDocument4 pagesFibra Opticasantiago navarroPas encore d'évaluation
- Informe N°5 - Red en AnilloDocument7 pagesInforme N°5 - Red en AnilloRocio Crisostomo ParejasPas encore d'évaluation
- El Robot Proton de ElektorDocument3 pagesEl Robot Proton de ElektorMoisesPas encore d'évaluation
- Procedimiento de Medición de La Adhesión Por TracciónDocument2 pagesProcedimiento de Medición de La Adhesión Por TracciónPer DCPas encore d'évaluation
- Capítulo 3 - Laboratorio de Comunicaciones OpticasDocument22 pagesCapítulo 3 - Laboratorio de Comunicaciones OpticasAntony FernandezPas encore d'évaluation
- Informe 003 AserrioDocument10 pagesInforme 003 AserrioJuan Carlos Cobos VelaPas encore d'évaluation
- Resumen Malhotra Capitulo 8Document3 pagesResumen Malhotra Capitulo 8David Callupe Reátegui100% (2)
- Programación Basica de Microcontroladores PIC en CDocument6 pagesProgramación Basica de Microcontroladores PIC en CMijael Edward Ttacca HuallaPas encore d'évaluation
- Robotic ADocument27 pagesRobotic AJorge E Ortega Lopez100% (1)
- Lab 3 Arduino PDFDocument5 pagesLab 3 Arduino PDFMarco Antonio Yupanqui LimachiPas encore d'évaluation
- Optica y AcusticaDocument15 pagesOptica y AcusticaLiliPas encore d'évaluation
- Satélites GeoestacionariosDocument15 pagesSatélites GeoestacionariosMaria ElenaPas encore d'évaluation
- Capitulo 1 de Comunicaciones OpticasDocument25 pagesCapitulo 1 de Comunicaciones OpticasrodrillogoPas encore d'évaluation
- Antologia Redes NeuronalesDocument220 pagesAntologia Redes NeuronalesEliz AquinoPas encore d'évaluation
- Evaluación de Sensores para Su Conexión A Tarjeta ArduinoDocument137 pagesEvaluación de Sensores para Su Conexión A Tarjeta Arduinopaco1805Pas encore d'évaluation
- Proyecto Innovador Mano ArticuladaDocument66 pagesProyecto Innovador Mano ArticuladaOscar Altamirano SilvaPas encore d'évaluation
- OptiSystem (Autoguardado)Document8 pagesOptiSystem (Autoguardado)Daniela Polanco GomezPas encore d'évaluation
- Enviar SMS Con Arduino y Módulo GSM SIM800LDocument4 pagesEnviar SMS Con Arduino y Módulo GSM SIM800Lllane_03100% (1)
- Modulo Gps Neo-6mDocument7 pagesModulo Gps Neo-6mdeibel navarroPas encore d'évaluation
- Espectro ElectromagneticoDocument11 pagesEspectro ElectromagneticoBrayan Omar Gonzales100% (1)
- Clase 20. Arduino SimulinkDocument9 pagesClase 20. Arduino SimulinkYayitaLeonaB.VanegasPas encore d'évaluation
- Normas de Las Fibras Ópticas Mono Modo G652 FINALDocument20 pagesNormas de Las Fibras Ópticas Mono Modo G652 FINALOscar EsparzaPas encore d'évaluation
- Práctica Rfid + LCDDocument8 pagesPráctica Rfid + LCDAlvaro CardenasPas encore d'évaluation
- Vidrio ÓpticoDocument6 pagesVidrio Ópticodaniel tsayco garciaPas encore d'évaluation
- Guia de usuario-LEGO MINDSTORMS EV3 PDFDocument59 pagesGuia de usuario-LEGO MINDSTORMS EV3 PDFricardoPas encore d'évaluation
- Los MultiplexoresDocument33 pagesLos MultiplexoresCarlos CarlosPas encore d'évaluation
- Robot Lego PDFDocument132 pagesRobot Lego PDFNatalia100% (1)
- Descripcion Ironman 2Document3 pagesDescripcion Ironman 2Daniel Caicedo BaronaPas encore d'évaluation
- Pruebas en OptisystemDocument6 pagesPruebas en OptisystemDario Caguana BuelePas encore d'évaluation
- Sistemas EmbebidosDocument31 pagesSistemas EmbebidosJuan Carlos Olivares RojasPas encore d'évaluation
- Informe RelojDigDocument11 pagesInforme RelojDigGerson PinedaPas encore d'évaluation
- Sistemas Microelectromecánicos (MEMS) y Sus AplicacionesDocument124 pagesSistemas Microelectromecánicos (MEMS) y Sus AplicacionesDauødhårø Deivis100% (1)
- Manual Construccion TelescopioDocument29 pagesManual Construccion TelescopioFranco Boggiano Zamora50% (2)
- 8.5 Enlace OpticoDocument14 pages8.5 Enlace OpticoDomenico La Verde RizziPas encore d'évaluation
- Comunicación Serial - Conceptos Generales - National Instruments PDFDocument4 pagesComunicación Serial - Conceptos Generales - National Instruments PDFStefy AlanizPas encore d'évaluation
- DRONESDocument65 pagesDRONESEder GuzmánPas encore d'évaluation
- Lab 14 Proyecto Pastillero Con Arduino-1Document12 pagesLab 14 Proyecto Pastillero Con Arduino-1Luca Pebu100% (1)
- Fibra Optica SubterraneaDocument37 pagesFibra Optica SubterraneaLucio Soto100% (1)
- Configuracion de FusesDocument9 pagesConfiguracion de FusesJuan Pablo Garcia LanderoPas encore d'évaluation
- Guia Del Proyecto Formativo SenaDocument18 pagesGuia Del Proyecto Formativo SenaJulianEstebanBeltranEcheverri0% (1)
- Guia 4 Tele PDFDocument4 pagesGuia 4 Tele PDFana maria ramirez garciaPas encore d'évaluation
- Informe Filtro ArduinoDocument3 pagesInforme Filtro ArduinoAndres ValdiviesoPas encore d'évaluation
- Robótica Móvil PDFDocument35 pagesRobótica Móvil PDFDavid QuintoPas encore d'évaluation
- Robotica MecanismosDocument7 pagesRobotica MecanismosMarcl Andrs SampdroPas encore d'évaluation
- Vision ArtificialDocument23 pagesVision ArtificialNatalia G LazcanoPas encore d'évaluation
- Optisystem DWDMDocument22 pagesOptisystem DWDMAngela CorderoPas encore d'évaluation
- Informe Laboratori #1 - IEEEDocument4 pagesInforme Laboratori #1 - IEEEOscar Jobany Gomez OchoaPas encore d'évaluation
- Reloj VHDLDocument7 pagesReloj VHDLAntonioPas encore d'évaluation
- Amplificadores OperacionalesDocument5 pagesAmplificadores OperacionalesAlejo FernándezPas encore d'évaluation
- DIODODocument4 pagesDIODOHenry Quispe ChoquePas encore d'évaluation
- Apuntes de OptoelectronicaDocument331 pagesApuntes de OptoelectronicaGerardo MartinezPas encore d'évaluation
- Calculos de AntenaDocument32 pagesCalculos de Antenaantoniohv21Pas encore d'évaluation
- Sistema Seguidor de LuzDocument6 pagesSistema Seguidor de LuzCesar Ordoñez OrtizPas encore d'évaluation
- IV congreso internacional de ingenierías: La ingeniería como base del desarrolloD'EverandIV congreso internacional de ingenierías: La ingeniería como base del desarrolloPas encore d'évaluation
- PotM 2018 12 Pruebas de Automatizacion y Control ESP 01Document14 pagesPotM 2018 12 Pruebas de Automatizacion y Control ESP 01Víctor Barreto VásquezPas encore d'évaluation
- Sesion 05 - Manual Autocad 2d 2016Document13 pagesSesion 05 - Manual Autocad 2d 2016Víctor Barreto VásquezPas encore d'évaluation
- ConvertirDocument45 pagesConvertirAlanya Leon RudyPas encore d'évaluation
- Ejercicios Complementarios 2011Document4 pagesEjercicios Complementarios 2011Víctor Barreto VásquezPas encore d'évaluation
- Manual de AutocadDocument2 pagesManual de AutocadVíctor Barreto VásquezPas encore d'évaluation
- S6 AutocadDocument19 pagesS6 Autocadyanet cordova callePas encore d'évaluation
- Sesion 03 - Manual Autocad 2d 2016Document11 pagesSesion 03 - Manual Autocad 2d 2016Víctor Barreto VásquezPas encore d'évaluation
- Manual de AutocadDocument2 pagesManual de AutocadVíctor Barreto VásquezPas encore d'évaluation
- Sesion 01 - Manual Autocad 2d 2016Document13 pagesSesion 01 - Manual Autocad 2d 2016Víctor Barreto VásquezPas encore d'évaluation
- TesisDocument175 pagesTesisVíctor Barreto VásquezPas encore d'évaluation
- Sesion 01 - Manual Autocad 2d 2016Document13 pagesSesion 01 - Manual Autocad 2d 2016Víctor Barreto VásquezPas encore d'évaluation
- Juego Máquina de Ocultar Bolas PDFDocument43 pagesJuego Máquina de Ocultar Bolas PDFVíctor Barreto VásquezPas encore d'évaluation
- Triceratops Robótico PDFDocument125 pagesTriceratops Robótico PDFVíctor Barreto VásquezPas encore d'évaluation
- Triceratops RobóticoDocument125 pagesTriceratops RobóticoVíctor Barreto VásquezPas encore d'évaluation
- Juego de Arcade para Desafiar La Velocidad de Reacción PDFDocument123 pagesJuego de Arcade para Desafiar La Velocidad de Reacción PDFVíctor Barreto VásquezPas encore d'évaluation
- Py-04 - Estudio de Mercado-1Document23 pagesPy-04 - Estudio de Mercado-1poolc91Pas encore d'évaluation
- Robot Acompañado Con Un BichoDocument124 pagesRobot Acompañado Con Un BichoVíctor Barreto VásquezPas encore d'évaluation
- Medidor de Vigas LegoDocument88 pagesMedidor de Vigas LegoVíctor Barreto VásquezPas encore d'évaluation
- Camión Por Control Remoto Lego Ev3Document32 pagesCamión Por Control Remoto Lego Ev3Víctor Barreto VásquezPas encore d'évaluation
- Juego de Arcade para Desafiar La Velocidad de ReacciónDocument123 pagesJuego de Arcade para Desafiar La Velocidad de ReacciónVíctor Barreto VásquezPas encore d'évaluation
- Gata de Bob PDFDocument72 pagesGata de Bob PDFVíctor Barreto VásquezPas encore d'évaluation
- Colorsorter PDFDocument114 pagesColorsorter PDFFreaksamaPas encore d'évaluation
- Guitarra Eléctrica-Lego EV3Document50 pagesGuitarra Eléctrica-Lego EV3Víctor Barreto VásquezPas encore d'évaluation
- Guitarra Eléctrica-Lego EV3Document50 pagesGuitarra Eléctrica-Lego EV3Víctor Barreto VásquezPas encore d'évaluation
- TaladradoDocument13 pagesTaladradoVíctor Barreto VásquezPas encore d'évaluation
- Ficha Tecnica Cubierta Aislante Rolan 1200Document1 pageFicha Tecnica Cubierta Aislante Rolan 1200danieldayettddPas encore d'évaluation
- Taller de Afianzamiento Noveno GradoDocument2 pagesTaller de Afianzamiento Noveno GradoCristina EspinosaPas encore d'évaluation
- Algebrizacion Del Concepto de DerivadaDocument20 pagesAlgebrizacion Del Concepto de DerivadaAlejandro Rojas TovarPas encore d'évaluation
- CalorimetriaDocument20 pagesCalorimetriawilliamPas encore d'évaluation
- BelCos-2MAY2098-SOS-PCD-XXXXX - MONTAJE DE TRANSFORMADORES DE POTENCIA - RevBDocument9 pagesBelCos-2MAY2098-SOS-PCD-XXXXX - MONTAJE DE TRANSFORMADORES DE POTENCIA - RevBmiguel ramirezPas encore d'évaluation
- 1.5 Materiales Compuestos - Equipo 6Document16 pages1.5 Materiales Compuestos - Equipo 6Francisco Arredondo100% (1)
- Problemas Grupo-01 PDFDocument2 pagesProblemas Grupo-01 PDFHiro Manuel Lozada NisshiokaPas encore d'évaluation
- Algebra Lineal PDFDocument5 pagesAlgebra Lineal PDFAlan TorijaPas encore d'évaluation
- Ultrasonido A Redes Electricas PDFDocument8 pagesUltrasonido A Redes Electricas PDFFelipe BernalPas encore d'évaluation
- Linea BaseDocument59 pagesLinea BaseJavier Alejandro Añazgo100% (2)
- Folleto Tecnico Arcus GlobalDocument13 pagesFolleto Tecnico Arcus GlobalHenry Fernando Valencia Rodriguez100% (1)
- Tesis de Relacion de Humedad Con Propiedades Mecanicas de Madera PDFDocument165 pagesTesis de Relacion de Humedad Con Propiedades Mecanicas de Madera PDFJaime ValdiviaPas encore d'évaluation
- Unidad01 - EMPUJE SOBRE SUPERFICIE PLANASDocument6 pagesUnidad01 - EMPUJE SOBRE SUPERFICIE PLANASPedro InsaurraldePas encore d'évaluation
- Ejercicios de Física Tuto IDocument9 pagesEjercicios de Física Tuto Isamy segura100% (1)
- Folleto Emulsiones PDFDocument12 pagesFolleto Emulsiones PDFPatricioAntonioDonosoPas encore d'évaluation
- La Pelota Saltarina de Meg PDFDocument2 pagesLa Pelota Saltarina de Meg PDFLaura Gomez AnzaldoPas encore d'évaluation
- Minucias o Como Identificar Una Huella DactilarDocument16 pagesMinucias o Como Identificar Una Huella DactilarDarwinEspinozaPas encore d'évaluation
- Alternativas para La Captación de Agua A Partir Del AireDocument8 pagesAlternativas para La Captación de Agua A Partir Del AiresicibelPas encore d'évaluation
- La EntalpíaDocument8 pagesLa EntalpíaJosé AbantoPas encore d'évaluation
- Secado - DIAPOSITIVASDocument45 pagesSecado - DIAPOSITIVASlopezPas encore d'évaluation
- Infome Neto de Secadora RectangularDocument5 pagesInfome Neto de Secadora RectangularSamuel MatavacaPas encore d'évaluation
- Lab Analisis 2 Practica 1 DETERMINACIÓN DEL ERROR RELATIVO DE LA CONCENTRACIÓNDocument8 pagesLab Analisis 2 Practica 1 DETERMINACIÓN DEL ERROR RELATIVO DE LA CONCENTRACIÓNpamelaPas encore d'évaluation