Vous aimerez peut-être aussi
- SM WA470-5 70001-UP GSBM024405 (Esp)Document947 pagesSM WA470-5 70001-UP GSBM024405 (Esp)Iongornistu100% (5)
- Clase 06 Diagrama de Bloques y Espacio de EstadosDocument37 pagesClase 06 Diagrama de Bloques y Espacio de EstadosHevert Vargas VargasPas encore d'évaluation
- Curso Labview EspañolDocument29 pagesCurso Labview Españolgdominguez73Pas encore d'évaluation
- Pauta EjerciciosDocument7 pagesPauta Ejercicioseduardo50% (2)
- Validez y ConfiabilidadDocument29 pagesValidez y ConfiabilidadAby Villarroel Torres100% (1)
- Regresion MultipleDocument31 pagesRegresion MultipleeliPas encore d'évaluation
- Laboratorio7 - LQRDocument17 pagesLaboratorio7 - LQRKevin Pelaez CardenasPas encore d'évaluation
- Tema3 CONTROL ÓPTIMO DE SISTEMAS DISCRETOS PDFDocument20 pagesTema3 CONTROL ÓPTIMO DE SISTEMAS DISCRETOS PDFBlizzkPas encore d'évaluation
- Espacio de EstadosDocument50 pagesEspacio de EstadosDerlis Romero50% (4)
- Control Optimo SeguimientoDocument5 pagesControl Optimo SeguimientoLenin Cadillo GutierrezPas encore d'évaluation
- Control Òptimo para Un Sistema LQRDocument16 pagesControl Òptimo para Un Sistema LQRXfrali Medina GuevaraPas encore d'évaluation
- Laboratorio2 - MT227 - 2020Document8 pagesLaboratorio2 - MT227 - 2020MB Legends100% (1)
- Respuesta Transitoria (Punto 6)Document56 pagesRespuesta Transitoria (Punto 6)Astrid CeballosPas encore d'évaluation
- Clase 1 ModelamientoDocument24 pagesClase 1 ModelamientoGerman Emilio Bujato HerreraPas encore d'évaluation
- Modelo de RegresionDocument8 pagesModelo de RegresionmanuelPas encore d'évaluation
- Trabajo #4 GRUPO 11Document7 pagesTrabajo #4 GRUPO 11Leonardo Bolivar VillegasPas encore d'évaluation
- Modelos No Lineales CortoDocument39 pagesModelos No Lineales CortoJohan NuñezPas encore d'évaluation
- Pc2 PasadoDocument14 pagesPc2 PasadoEric OrdoñezPas encore d'évaluation
- 2011 TP2 - LQR DiscretoDocument7 pages2011 TP2 - LQR Discretosebastian nasiPas encore d'évaluation
- Distribución Log-Normal ExponerDocument9 pagesDistribución Log-Normal ExponerJhonatan Santa Cruz CamposPas encore d'évaluation
- Segunda Unidad Parte CDocument15 pagesSegunda Unidad Parte CDario AgramontePas encore d'évaluation
- PresentaciónDocument29 pagesPresentaciónDIEGO ALEJANDRO CASTILLO RAYMEPas encore d'évaluation
- Trabajo Correjido Tarea 4Document7 pagesTrabajo Correjido Tarea 4hoolmanPas encore d'évaluation
- Cap 6Document25 pagesCap 6shoggothassoPas encore d'évaluation
- Apuntes Control Optimo Cap 3-4Document18 pagesApuntes Control Optimo Cap 3-4Serna ReynaPas encore d'évaluation
- Ejemplos de Control OptimoDocument5 pagesEjemplos de Control OptimoJohn CMPas encore d'évaluation
- Control Moderno Practica 4 17-2 Fim UniDocument5 pagesControl Moderno Practica 4 17-2 Fim UniJordy CanalesPas encore d'évaluation
- Clase 6 Unidad 2 Modelo de Espacio de EstadoDocument4 pagesClase 6 Unidad 2 Modelo de Espacio de EstadoMilton VariosPas encore d'évaluation
- Ecuaciones de EstadoDocument8 pagesEcuaciones de Estado...Pas encore d'évaluation
- MehDocument18 pagesMehBrian M. Carrillo ChairezPas encore d'évaluation
- Laboratorio 2 de AutomatizaciónDocument21 pagesLaboratorio 2 de AutomatizaciónDavid Damian GutierrezPas encore d'évaluation
- 03 A Sistemas DiscretosDocument27 pages03 A Sistemas DiscretosLiliana BorotochePas encore d'évaluation
- CM 4 N2 Práctica8 1512822Document14 pagesCM 4 N2 Práctica8 1512822Paola de LeonPas encore d'évaluation
- Conceptos Sobre Control ÓptimoDocument5 pagesConceptos Sobre Control ÓptimoDiego Armando OspinaPas encore d'évaluation
- OptimoDocument33 pagesOptimoMarcelo Quispe CcachucoPas encore d'évaluation
- Observador de Orden Minimo MimoDocument31 pagesObservador de Orden Minimo MimoJuan Flores CórdovaPas encore d'évaluation
- Lab 2 Control DigitalDocument15 pagesLab 2 Control DigitalAlberto TorresPas encore d'évaluation
- 06 - Espacio de EstadosDocument56 pages06 - Espacio de EstadosMe llaman RomeoPas encore d'évaluation
- Informe de Control ModernoDocument14 pagesInforme de Control ModernoMiguel Arzapalo VillonPas encore d'évaluation
- Clase 8 de Vibraciones Mecanicas 2023 IIDocument13 pagesClase 8 de Vibraciones Mecanicas 2023 IIALCIDES LUIS FABIAN BRA�EZPas encore d'évaluation
- Apuntes Control Optimo Cap 5-6Document65 pagesApuntes Control Optimo Cap 5-6Serna ReynaPas encore d'évaluation
- Transformada ZetaDocument46 pagesTransformada ZetaDanny Erquinio LopezPas encore d'évaluation
- MotorDocument15 pagesMotorBrad QuirozPas encore d'évaluation
- Trabajo Colaborativo de La Tarea 4 Control AnálogoDocument8 pagesTrabajo Colaborativo de La Tarea 4 Control AnálogohoolmanPas encore d'évaluation
- Codificación en Fortran de El Oscilador Armónico Simple y AmortiguadoDocument13 pagesCodificación en Fortran de El Oscilador Armónico Simple y AmortiguadoJose Omar Mena PomaPas encore d'évaluation
- Modelado en El Espacio de EstadosDocument5 pagesModelado en El Espacio de EstadosGuardado EduardoPas encore d'évaluation
- 22 Previos Resueltos de Transferencia de Calor - Omar Gelvez - U.I.SDocument71 pages22 Previos Resueltos de Transferencia de Calor - Omar Gelvez - U.I.SYeison MontañaPas encore d'évaluation
- Sistemas de SeguimientoDocument5 pagesSistemas de SeguimientoRonald Alejandro Chaupin BautistaPas encore d'évaluation
- Actividad 3 - GNDocument11 pagesActividad 3 - GNMarco SabillonPas encore d'évaluation
- Controlabilidad y ObservabilidadDocument8 pagesControlabilidad y ObservabilidadFranco ApolinarioPas encore d'évaluation
- Examen Final Control III 2020-II WDocument3 pagesExamen Final Control III 2020-II WandavarezPas encore d'évaluation
- Sobrevoltajes en Lineas TransmisionDocument18 pagesSobrevoltajes en Lineas TransmisionJuan MollericonaPas encore d'évaluation
- Taller 2 Control 3Document2 pagesTaller 2 Control 3Robinson Poveda CamargoPas encore d'évaluation
- Tabla de Ecuaciones Transferencia de CalorDocument6 pagesTabla de Ecuaciones Transferencia de CalorAndres AriasPas encore d'évaluation
- Tarea 4-Control Analogo F.ADocument11 pagesTarea 4-Control Analogo F.APAULA XIMENA RONCANCIO GUERRAPas encore d'évaluation
- Deduccion de Las Ecuaciones de Navier yDocument7 pagesDeduccion de Las Ecuaciones de Navier yIván RamosPas encore d'évaluation
- Problemas LQ Horizonte FinitoDocument3 pagesProblemas LQ Horizonte FinitoJuancaPas encore d'évaluation
- Sistemas de Control 2 Tarea 1Document10 pagesSistemas de Control 2 Tarea 1Iván Fernando Mayorga HilarioPas encore d'évaluation
- Apuntes CM Tema3 EjerciciosDocument14 pagesApuntes CM Tema3 EjerciciosandreuPas encore d'évaluation
- Informe de Control ModernoDocument20 pagesInforme de Control ModernoMiguel Arzapalo VillonPas encore d'évaluation
- Metodo Normal Log NormalDocument19 pagesMetodo Normal Log NormalIvach AChPas encore d'évaluation
- Características de RTMPDocument3 pagesCaracterísticas de RTMPcontareaPas encore d'évaluation
- Problemade BalanceDocument7 pagesProblemade BalanceAlejandra Adrian TejadaPas encore d'évaluation
- Semana 11 - VALORACIÓN AMBIENTAL POR EL MÉTODO DE COSTO DE VIAJEDocument26 pagesSemana 11 - VALORACIÓN AMBIENTAL POR EL MÉTODO DE COSTO DE VIAJEAlex AcevedoPas encore d'évaluation
- Qué Es Un TermoparDocument7 pagesQué Es Un TermoparJavier Rodriguez GonzalezPas encore d'évaluation
- Sistema de Numeracion DecimalDocument1 pageSistema de Numeracion DecimalRafael Torre Ortega0% (1)
- Bocatomas ItdgDocument44 pagesBocatomas ItdgJose Huillca VargasPas encore d'évaluation
- 102.A Trazo y ReplanteoDocument5 pages102.A Trazo y ReplanteoAlberto RodriguezPas encore d'évaluation
- E Slide F1 Diseño de Zapatas Aisladas Con SafeDocument39 pagesE Slide F1 Diseño de Zapatas Aisladas Con SafeMario GutiérrezPas encore d'évaluation
- Practica Tabla de Frecuencias para Datos AgrupadosDocument2 pagesPractica Tabla de Frecuencias para Datos Agrupadoshernan iriartePas encore d'évaluation
- EVALUACION SUSTITUTORIO CALCULO III - 2020 20-Propuesto PDFDocument2 pagesEVALUACION SUSTITUTORIO CALCULO III - 2020 20-Propuesto PDFPohita AnaferPas encore d'évaluation
- CuencaDocument8 pagesCuencaRevan1994Pas encore d'évaluation
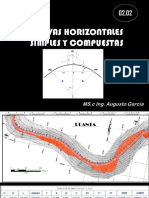
- 02.02 Curvas Simples - Ecuacion de EmpalmeDocument10 pages02.02 Curvas Simples - Ecuacion de EmpalmeJhonny Zuasnabar PaucarPas encore d'évaluation
- Bender Murray Bioquimica Ilustrada 29a Capitulo MuestraDocument6 pagesBender Murray Bioquimica Ilustrada 29a Capitulo MuestraAlix HernandezPas encore d'évaluation
- Informe de Motores y TurbinasDocument8 pagesInforme de Motores y TurbinasDavid AlejoPas encore d'évaluation
- Procesos y Tipos de Soldadura Grupo 02Document7 pagesProcesos y Tipos de Soldadura Grupo 02lauraPas encore d'évaluation
- Problemas No 9 Sesion 24Document14 pagesProblemas No 9 Sesion 24Jose M. GuillermoPas encore d'évaluation
- Los Quemadores de KHDDocument6 pagesLos Quemadores de KHDlevishamilton100% (2)
- Motor OleohidraulicoDocument1 pageMotor OleohidraulicoDiego Duran YanezPas encore d'évaluation
- Presentación de PowerPointDocument7 pagesPresentación de PowerPointEzequiel RivoirPas encore d'évaluation
- Laboratorio 5 Realimentación Negativa Con OPAMPDocument3 pagesLaboratorio 5 Realimentación Negativa Con OPAMPBryan Marin MartinezPas encore d'évaluation
- Proyeccto FinalDocument12 pagesProyeccto FinalRodrigo PadillaPas encore d'évaluation
- Guia N°6 Esquemas Eléctricos 2022-2.Document14 pagesGuia N°6 Esquemas Eléctricos 2022-2.Gersson MontesPas encore d'évaluation
- EJERCICIO GPM Ing de GasDocument7 pagesEJERCICIO GPM Ing de GasSebastian Otalora BarriosPas encore d'évaluation
- Bloque 2 Lectura BaseDocument57 pagesBloque 2 Lectura Basenorma adrianaPas encore d'évaluation
- Quimica 06 CiDocument4 pagesQuimica 06 Cilizeth çPas encore d'évaluation
- 2.3. Efectuar Sumas de DatosDocument7 pages2.3. Efectuar Sumas de DatosJose CruxPas encore d'évaluation