Académique Documents
Professionnel Documents
Culture Documents
Position Synchonizer
Transféré par
JWCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Position Synchonizer
Transféré par
JWDroits d'auteur :
Formats disponibles
1
Altivar 71 Position Synchroniser
Operation Manual
Spinning Control PDL Part No. 90344-010 Rev A
2
Disclaimer
The software described in this manual is sold or licensed as is. Should the program prove defective the user (and not PDL
Electronics Ltd, its distributor or its dealer) assumes the entire cost of all necessary servicing, repair, and any incidental or
consequential damages resulting from any defect in the software. Further, PDL Electronics Ltd reserves the right to revise this
publication and to make changes from time to time in the contents hereof without obligation to notify any person of such
revision or changes
Revision History Table
Date Revision Revision Comments
15-07-05 90948011a Initial release of ATV71 Synchroniser.
15-09-05 90948011b Enabled Heartbeat. Added Debounce. Removed Sync prox mode. Improved synchronising.
4-10-05 90948011c Disabled faults in Setup mode. Added Heartbeat On/Off screen. Improved missing index fault
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
ATV71 POSITION SYNCHRONISER
ATV71 Programming Manual Addendum 90948011c
CONTENTS
1 Introduction ....................................................................................................................................4
2 Specifications:................................................................................................................................2
3 Background:...................................................................................................................................2
4 Synchroniser Program Overview: ..................................................................................................3
4.1 Index Pulse ...........................................................................................................................3
4.2 Revolutions per Index (R/I) ...................................................................................................3
4.3 Power Up...............................................................................................................................3
4.4 Index Monitoring....................................................................................................................3
4.5 Position Monitoring................................................................................................................4
4.6 Offset.....................................................................................................................................4
4.7 CANopen Network ................................................................................................................4
4.8 Control Type..........................................................................................................................4
5 Synchroniser Screens....................................................................................................................5
5.1 Overview: ..............................................................................................................................5
5.2 New Screens .........................................................................................................................6
6 Setting Up ....................................................................................................................................15
6.1 Master Drive Input/Outputs: ................................................................................................15
6.2 Controller Inside Input/Outputs: ..........................................................................................16
6.3 Slave Drive Input/Outputs: ..................................................................................................16
6.4 Maximum Speed Limit: .......................................................................................................17
6.5 CANopen Network: .............................................................................................................17
6.6 RPI setup: ...........................................................................................................................18
6.7 Miscellaneous: ....................................................................................................................18
6.8 Customisation of the Monitoring Display:............................................................................18
7 Synchroniser Parts.......................................................................................................................19
8 Status Messages .........................................................................................................................20
9 Synchroniser Faults. ....................................................................................................................20
10 Commissioning Parameter Record Sheets and I/O Assignment for Master Drive ......................22
11 Commissioning Parameter Record Sheets I/O Assignment for Slave Drives .............................24
12 Documentation/Manuals ..............................................................................................................27
13 Glossary.......................................................................................................................................28
14 Index ............................................................................................................................................29
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
4
1 Introduction
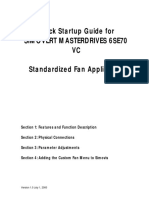
The objective of the ATV71 Position Synchroniser is to ensure the position of 2 or more
devices such as conveyors are kept in alignment or synchronism.
One device is deemed to be the Master and the remaining devices are deemed to be
Slaves. The Master drive is given the desired speed reference. The basic function of the
Slave drive is to follow the speed of the master, but if a positional error is detected its speed
is automatically increased or decreased to maintain position synchronism.
The Master drive consists of an ATV71 variable speed drive with a Controller Inside card
fitted and the ATV position synchroniser program loaded. The Slave drives are standard
ATV71 variable speed drives with no Controller Inside card fitted.
A sensing device such as a proximity switch is mounted to each device to indicate its
position. The proximity switches are connected to the Logical Inputs (digital inputs) of the
Controller Inside card and provide an index pulse at appropriate positions during the
movement of the device being synchronised. The Synchroniser continuously monitors these
index pulses and determines if there is a positional error between the Master drive and any
of the Slaves. If an error is detected a speed adjustment is made to the Slave drive
concerned so that synchronisation is maintained.
Inter-drive communication including the speed reference, command (start/stop) signals and
drive status is achieved via the ATV71 CANopen bus.
Figure 1. Typical Synchroniser Layout
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
2
This addendum applies specifically to synchronising control program number 90948-0-
V11IEO2-c which is designed to replace the PDL Elite Series synchronising Vysta program
number 9974039c
This addendum specifically describes the firmware changes to the ATV71 drive with this
program loaded and operating. The Synchroniser monitoring and configuration screens will
be displayed in Menu 1.14. The individual screens under this menu are described in section
5 of this document. If these screens are not displayed then either the Controller Inside card
is not fitted or alternatively this synchroniser program is not loaded into the card.
RDY Term +0.00Hz 0A
1. DRIVE MENU
1.10 DIAGNOSTICS
1.11 IDENTIFICATION
1.12 FACTORY SETTINGS
1.13 USER MENU
1.14 SYNCHRONISER
Code << >> Quick
Figure 2. Synchroniser Menu
2 Specifications:
Maximum number of Slave drives 8
Minimum time between Index pulses 2 sec
Motor revolutions per index pulse: 10 to 64000
Max length of CANopen bus 500m
This system is designed for slow to medium speed applications such as sheep/beef
processing chains.
A constant revolutions per index ratio is required for each drive. This synchronising program
is not suitable for synchronising applications that have a varying revolutions per index such
as with items unevenly spaced in a conveyor.
Synchronising only operates in the forward direction.
3 Background:
The position synchroniser is typically used in manufacturing industries to synchronise the
position of 2 or more devices such as belt conveyors or muti-chain conveyors as used in
the meat processing industry.
Simple speed synchronising can be achieved utilizing a standard ATV71 without a
Controller Inside. However due to small speed errors an accumulation of slowly increasing
positional error between the motor shafts will not be compensated for. For this reason
speed synchronisation is suited only to systems where no positional conditions are required.
Position synchronising must be used wherever the position of the motor output device is
important and no accumulation of error can be accepted. The ATV71 Position Synchroniser
provides full position synchronisation for slow speed to medium applications.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
3
4 Synchroniser Program Overview:
The ATV71 Position Synchroniser is a multidrive configuration based around 1 master drive
and up to 8 slaves. Its basic operation is to keep the position of the slave drive output
device synchronised with the position of the master.
The master drive operates at a required speed depending on the process and the speeds
of the slave drives are increased or reduced to maintain position synchronism. The rate of
correction will depend on the motor accel/decel time, the Correction Speed Offset and the
Gain (See section 5 for a description of these parameters).
The master drive must be an ATV71 with a Controller Inside card fitted and the ATV71
Synchroniser control program loaded. The Slave drives must be ATV71s but they do not
require a Controller Inside card.
4.1 Index Pulse
A proximity switch for each drive is employed to indicate the process position. The
Synchroniser continuously monitors these index pulses and when a positional error occurs
the synchroniser responds by a speed correction so that synchronisation is maintained. All
the index proximity switches are connected to the Logical Inputs of the controller inside.
Each index pulse must have a minimum duration of 6 ms.
4.2 Revolutions per Index (R/I)
The R/I is the number of motor revolutions performed between each index. Each drives can
have a different number of Revolutions Per Index which is entered into the ATV71 display.
This is a critical parameter which must be accurately configured for each drive including the
Master.
4.3 Power Up
After power up or a reset, one index pulse must be received by the Master and Slave drive
before position synchronising is started.
4.4 Index Monitoring
There are 2 types of index faults which are monitored:
(1) Index Error: The index error is the difference between the actual motor
revolutions between index pulses and expected revolutions entered into
screens O17, O19, O22, O25, O28, O31, O37 and O40. If the index error
exceeds the maximum allowable set in screen O13 an Index Fault will be
generated. An index error is recognized only after the drive has received 3
index pulses after power up or a reset.
(2) Missing Index. An index is assumed to have been missed if an index pulse
has not been received within the expected no of revolutions. The expected
revolutions is equal to the R/I for the drive concerned plus the maximum
allowable Index Error set in screen O13. If the number of consecutive
missed index pulses exceeds the amount set in screen O14 an Index fault
will be generated.
The status message will indicate which drive has the index fault
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
4
4.5 Position Monitoring
The ATV71 Position Synchroniser continuously monitors the number of revolutions
(position) of each drive. If the difference between the Master drive position and a Slave
drive position exceeds the maximum allowable position error set in screen O13 then a
Position Fault will occur. A Position Fault is only recognized after the Master and Slave
drive have both received 3 index pulses after power up or a reset. The status message will
indicate which Slave drive has the position fault.
4.6 Offset
The index pulse of each slave drive does not have to occur at the same time. A positional
offset for each Slave drive relative to the Master can be configured.
4.7 CANopen Network
The Controller Inside card is the CANopen master for the Network. The Slave drives are all
CANopen slaves. The Master drive is not part of the CANopen Network. The Controller
Inside communicates directly to the master drive over the back plane. From a CANopen
view point the Controller Inside card is separate to the Master drive that is mounted into.
The Controller Inside CANopen address is fixed to Node 1 and the bit rate to 125Mbps.
Therefore the Slave addresses must not be set to Node 1 and the Slave bit rate must be
set to 125Mbps.
4.8 Control Type
The ATV71 synchroniser would normally be operated in sensorless vector mode but it will
still function with reduced accuracy in V/Hz mode. Use of an encoder in closed loop vector
mode will improve the accuracy of the synchroniser. Sometimes closed loop mode is
required to provide a sensitive torque limit in place of an over tension sensor on
mechanisms with a large gearbox reduction.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
5
5 Synchroniser Screens
5.1 Overview:
To configure the additional synchroniser functions provided by the ATV71 Position
Synchroniser there is a new sub menu 1.14 to monitor and adjust parameters peculiar to
this synchronising control program.
Figure 3. Synchroniser Menu Access
Refer to the Graphic Display Terminal section of the ATV 71 programming Manual for
instructions on how to navigate the display and for information on any standard ATV71
screen which will not be described in this addendum.
Summary of Synchroniser Screens:
Screen Name Description Code Page
MONITOR.. Monitor slave number? O01 6
Status Synchroniser status display O02 6
Mast Postion Master position O03 6
Slv 1 Postion* Slave 1 position O04 6 Monitoring
Slv 1 Pos Er* Slave 1 position error O05 7 Screens
Slv 1 Idx Er* Slave 1 index error O06 7
Slv 1 Mis Idx* Slave 1 missing index count O07 7
Slv 1 R/Idx* Slave 1 revolutions/Index O08 7
CONFIGURE O09 7
No. Of Slaves Select no of slaves O10 8
Mode Select setup or synchronising mode O11 8
Max Corct Spd Max speed correction O12 8
Max Pos Err Max position or index error O13 8
Max Misng Idx Max missing index pulses allowable O14 9
Gain Gain O15 9
Debounce Proximity switch debounce O16 9
Master R/I Master Rev/Index O17 9
Slv 1 R/I Slave 1 Rev/Index O19 10 Configuration
Slv 1 OfSt Slave 1 OffSet O20 10 Screens
Slv 2 R/I Slave 2 Rev/Index O22 10
Slv 2 OfSt Slave 2 OffSet O23 10
Slv 3 R/I Slave 3 Rev/Index O25 11
Slv 3 OfSt Slave 3 OffSet O26 11
Slv 4 R/I Slave 4 Rev/Index O28 11
Slv 4 OfSt Slave 4 OffSet O29 11
Slv 5 R/I Slave 5 Rev/Index O31 12
Slv 5 OfSt Slave 5 OffSet O32 12
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
6
Slv 6 R/I Slave 6 Rev/Index O34 12
Slv 6 OfSt Slave 6 OffSet O35 12
Slv 7 R/I Slave 7 Rev/Index O37 13
Slv 7 ofSt Slave 7 OffSet O38 13
Slv 8 R/I Slave 8 Rev/Index O40 13
Slv 8 OfSt Slave 8 OffSet O41 13
CAN Heartbeat CANopen heartbeat on/off O48 14
*The text in these screens is dependent on which drive is selected in screen O01
5.2 New Screens
Synchroniser Menu Screens (monitoring screens)
Name MONITOR
Description Monitor Drive
Code O01
Range Master
Slave 1
:
:
Slave 8
Default Slave 1
Function This selects which drive will be monitored in screens O04 to O08
below
Name STATUS
Description Status Display Screen
Code O02
Function Displays the status of the synchroniser including any synchroniser
generated fault that may occur.
A list of all possible synchroniser status messages are given in
section 8 of this manual.
Name Mast Pos
Description Master Drive Position.
Code O03
Range 0 to 120%
Units % of the Master drive Revolutions Per Index
Function Displays the revolutions the Master drive has travelled since its
last index.
Name Slv 1 Pos
Description Slave 1 Position.
Code O04
Range 0 to 120%
Units % of the Revolutions Per Index
Function Displays the revolutions the drive selected in screen O01 (above)
has travelled since its last index. I.e. if screen O01 is set to Slave
6 then this screen will display the revolutions Slave 6 drive has
travelled since its last index.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
7
Synchroniser Menu Screens (monitoring screens) - Continued
Name Slv 1 Pos Er
Description Slave 1 Position Error.
Code O05
Range 0 to 100
Units % of Revolutions Per Index
Function Displays the positional error between Master drive and the Slave
drive selected in screen O01 (above) If this screen exceeds the
maximum allowable position error set in screen O13 (below) then a
Position Fault will occur.
Name Slv 1 Idx Er
Description Slave 1 Index Error.
Code O06
Range 0 to 100
Units % of Revolutions Per Index
Function Displays the Index Error of the drive selected in screen O01
(above). The Index Error is the difference between the actual
number of motor revolutions between index pulses and the
expected number of revolutions (entered into screens O16 to O40
below). If this screen exceeds the maximum allowable error set in
screen O13 below then an Index Fault will occur.
This screen will update every time a valid index pulse is received.
Name Slv 1 Mis Idx
Description Slv 1 Missing Index Counter.
Code O07
Range 0 to 10
Function Displays the number of consecutive missing index pulses the drive
selected in screen O01 has had. An index is assumed to have been
missed if an index pulse has not been received within the expected
no of revolutions. The expected revolutions is equal to the R/I for
the drive concerned plus the maximum allowable Index Error set in
screen O13. If the number of consecutive missed index pulses
exceeds the amount set in screen O14 an Index fault will be
generated.
Name Slv 1 R/Idx
Description Slave 1 Actual Revolutions per Index.
Code O08
Range 5 to 65000
Units Motor Revolutions
Function Displays the actual number of revolutions per index of the drive
selected in screen O01 (above). This is updated every time an index
pulse is received.
This value is then entered into the R/I configuration screens (O17,
O19, O22, O25, O28, O31, O37, O40) during commissioning.
Name CONFIGURE
Code O09
Function This screen only acts as a label to indicate the division between the
monitoring screens and the configuration screens.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
8
Synchroniser Menu Screens (configuration screens)
Name No. of Slaves
Description Number of Slave Drives
Code O10
Range 1 to 8
Default 1
Function Configures the number of Slave drives in the system. Whenever
this is altered the drive power must be cycled to reinitialise the
CANopen network.
Name Mode
Description Mode.
Code O11
Range Setup
Synch
Default SynchSync Position
Function In Setup mode the slave drive will follow the master without any
position correction. The speed the slave drive will travel at is:
%SpeedSlave = %SpeedMaster x R/ISlave / R/IMaster
Also when in setup mode any synchroniser faults are disabled.
This includes any position fault, index faults and some CAN faults.
Name Sync
Max Position
Correctenables
Spd a more sophisticated algorithm which
Description Maximum Correction Speed.
Code O12
Range 0 to 100
Default 30
Units % of motor rated synchronous speed
Function Configures the maximum speed correction that will be applied to a
slave drive. I.e. if the slave drive would travel at 80% speed with
no speed correction and this screen is set to 10% then the speed
limits which the drive will stay within to keep in synchronism are
70% and 90%. This affects the speed of response to a position
error.
Name Max Pos Err
Description Maximum Position/Index Error.
Code O13
Range 0 to 100
Default 10
Units % of the total revolutions between index pulses.
Function Configures the maximum allowable position error before a Position
fault is initiated.
Also configures the maximum Index Error before an Index Fault is
initiated.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
9
Synchroniser Menu Screens (configuration screens) continued
Name Max Misng Idx
Description Maximum Missing Index.
Code O14
Range 0 to 10
Default 1
Function Configures the maximum number of consecutive missing index
pulses before an Index Fault is initiated. The actual number of
consecutive missed index pulses can be viewed in screenO07.
Name Gain
Description Proportional Gain
Code O15
Range 0.1 to 2.0
Default 1
Function Configures the proportional gain of the synchroniser position loop.
Setup Normally this screen can be left at its default value. Reduce this
parameter if the slave motor speed oscillates excessively.
Increase this parameter if the slave drive takes too long get into
synchronism.
Name Debounce
Description Index debounce.
Code O16
Range 0 to 60
Default 20
Units % of the total revolutions between index pulses.
Function Configures the index pulse debounce for all drives. Eg if the
debounce is set to 50%, when the drive receives an index pulse it
will not accept another index pulse until it has travelled 50% of the
motor revolutions to the next index pulse.
Setup Set to an appropriate value if there is a possibility that multiple
index pulses could be received.
Name Master R/I
Description Master Drive Revolutions Per Index.
Code O17
Range 5 to 65535
Default 100
Units Rev/Index
Function Configures the Revolutions Per Index of the Master drive. The
synchroniser program uses this value to calculate the base speed
of the slave drives and to detect missing or out of range index
pulses.
Setup Run the motor in Setup Mode until at least 2 index pulses have
been received. Then enter the Master drive actual R/I from screen
O08 above into this screen.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
10
Synchroniser Menu Screens (configuration screens) continued
Name Slv 1 R/I
Description Slave 1 Drive Revolutions Per Index.
Code O19
Range 5 to 65535
Default 100
Units Motor revolutions / Index pulse (R/I)
Function Configures the Revolutions Per Index of the Slave drive. The
synchroniser program uses this value to calculate the base speed
of the slave drive and to detect missing or out of range index
pulses.
Base SpeedSlave = SpeedMaster x R/ISlave / R/IMaster
Setup Run the motor in Setup Mode until at least 2 index pulses have
been received. Then enter the Slave 1 actual R/I from screen O08
above into this screen.
Name Slv 1 OfSt
Description Slave 1 OffSet
Code O20
Range -50.0 to +50.0
Default 0
Units % of the total revolutions between Slave 1 index pulses (R/I).
Function Configures a position offset of Slave 1 drive relative to the Master.
Setup Set to the required offset.
Name Slv 2 R/I
Description Slave 2 Drive Revolutions Per Index.
Code O22
Range 5 to 65535
Default 100
Units Motor revolutions / Index pulse (R/I)
Function Same as for Slv 1 R/I
Setup Same as for Slv 1 except use the Slave 2 actual R/I from screen
O08.
Note This screen is visible when Slave 2 is selected in No. of Slaves
screen above.
Name Slv 2 OfSt
Description Slave 2 OffSet
Code O23
Range -50.0 to +50.0
Default 0
Units % of the total revolutions between Slave 2 index pulses (R/I).
Function Configures a position offset of Slave 2 drive relative to the Master.
Setup Same as for Slv 1 Offset.
Note This screen is visible when Slave 2 is selected in No. of Slaves
screen above.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
11
Synchroniser Menu Screens (configuration screens) continued
Name Slv 3 R/I
Description Slave 3 Drive Revolutions Per Index.
Code O25
Range 5 to 65535
Default 100
Units Motor revolutions / Index pulse (R/I)
Function Same as for Slv 1 R/I
Setup Same as for Slv 1 except use the Slave 3 actual R/I from screen
O08.
Note This screen is visible if Slave 3 is selected in No. of Slaves
screen above.
Name Slv 3 OfSt
Description Slave 3 position offset
Code O26
Range -50.0 to +50.0
Default 0
Units % of the total revolutions between Slave 3 index pulses (R/I).
Function Configures a position offset of Slave 3 drive relative to the Master.
Setup Same as for Slv 1 offset.
Note This screen is visible if Slave 3 is selected in No. of Slaves
screen above.
Name Slv 4 R/I
Description Slave 4 Drive Revolutions Per Index.
Code O28
Range 5 to 65535
Default 100
Units Motor revolutions / Index pulse (R/I)
Function Same as for Slv 1 R/I
Setup Same as for Slv 1 except use the Slave 4 actual R/I from screen
O08.
Note This screen is visible if Slave 4 is selected in No. of Slaves
screen above.
Name Slv 4 OfSt
Description Slave 4 position off set
Code O29
Range -50.0 to +50.0
Default 0
Units % of the total revolutions between Slave 4 index pulses (R/I).
Function Configures the position offset of Slave 4 relative to the Master.
Setup Same as for Slv 1 offset.
Note This screen is visible if Slave 4 is selected in No. of Slaves
screen above.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
12
Synchroniser Menu Screens (configuration screens) continued
Name Slv 5 R/I
Description Slave 5 Drive Revolutions Per Index.
Code O31
Range 5 to 65535
Default 100
Units Motor revolutions / Index pulse (R/I)
Function Same as for Slv 1 R/I
Setup Same as for Slv 1 except use the Slave 5 actual R/I from screen
O08.
Note This screen is hidden if Slave 5 is not selected in No. of Slaves
screen above.
Name Slv 5 OfSt
Description Slave 5 position offset.
Code O32
Range -50.0 to +50.0
Default 0
Units % of the total revolutions between Slave 5 index pulses (R/I).
Function Configures the position offset of Slave 5 relative to the Master.
Setup Same as for Slv 1 Offset.
Note This screen is hidden if Slave 5 is not selected in No. of Slaves
screen above.
Name Slv 6 R/I
Description Slave 2 Drive Revolutions Per Index.
Code O34
Range 5 to 65535
Default 100
Units Motor revolutions / Index pulse (R/I)
Function Same as for Slv 1 R/I
Setup Same as for Slv 1 except use the Slave 6 actual R/I from screen
O08.
Note This screen is hidden if Slave 6 is not selected in No. of Slaves
screen above.
Name Slv 6 OfSt
Description Slave 6 position offset.
Code O35
Range -50.0 to +50.0
Default 0
Units % of the total revolutions between Slave 6 index pulses (R/I).
Function Configures a position offset of Slave 6 relative to the Master.
Setup Set to the required offset.
Note This screen is hidden if Slave 6 is not selected in No. of Slaves
screen above.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
13
Synchroniser Menu Screens (configuration screens) continued
Name Slv 7 R/I
Description Slave 7 Drive Revolutions Per Index.
Code O37
Range 5 to 65535
Default 100
Units Motor revolutions / Index pulse (R/I)
Function Same as for Slv 1 R/I
Setup Same as for Slv 1 except use the Slave 7 actual R/I from screen
O08.
Note This screen is hidden if Slave 7 is not selected in No. of Slaves
screen above.
Name Slv 7 OfSt
Description Slave 7 position offset.
Code O38
Range -50.0 to +50.0
Default 0
Units % of the total revolutions between Slave 7 index pulses (R/I).
Function Configures a position offset of Slave 7 relative to the Master.
Setup Set to the required offset.
Note This screen is hidden if Slave 7 is not selected in No. of Slaves
screen above.
Name Slv 8 R/I
Description Slave 8 Drive Revolutions Per Index.
Code O40
Range 5 to 65535
Default 100
Units Motor revolutions / Index pulse (R/I)
Function Same as for Slv 1 R/I
Setup Same as for Slv 1 except use the Slave 8 actual R/I from screen
O08.
Note This screen is hidden if Slave 8 is not selected in No. of Slaves
screen above.
Name Slv 8 OfSt
Description Slave 8 position offset
Code O41
Range -50.0 to +50.0
Default 0
Units % of the total revolutions between Slave 8 index pulses (R/I).
Function Configures a position offset of Slave 8 relative to the Master.
Setup Set to the required offset.
Note This screen is hidden if Slave 8 is not selected in No. of Slaves
screen above.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
14
Synchroniser Menu Screens (configuration screens) continued
Name CAN Flts
Description CANopen Faults.
Code O48
Range On/Off
Default On
Function Disables the Synchroniser initiated CANopen faults. This may
allow the Synchroniser to continue to operate with a slower
response if there are intermittent CANopen errors.
Warning Errors in the CANopen network may not be detected if this
parameter is Off. This may result in loss of control of the slave
drives.
Name 909480IE02c
Description ATV71 Synchroniser program revision number. Read only.
Code O50
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
15
6 Setting Up
The steps for setting up the ATV71 drive as outlined in the ATV71 Simplified Manual should
be completed on each drive in the master/slave network before performing the following
synchronizer setup procedure.
6.1 Master Drive Input/Outputs:
Figure 4 gives the recommended I/O wiring for the Master drive and Table 1 gives the
corresponding parameter configuration.
A1
ATV71
+24V
+10V
COM
COM
PWR
AI1+
AO1
AI1-
AI2
LI1
LI2
LI3
LI4
LI5
LI6
0V
SPEED REFERENCE
(OPTIONAL)
RUN FORWARD
FAULT RESET
RUN REVERSE
FAST STOP
Figure 4. Recommended Master Drive I/O Wiring
Menu Parameter Value Comment
1.3 Settings High Speed As appropriate see section 6.4
1.6 Command Ref.1 chan AI1 Optional
1.6 Command Stop Key priority Yes Optional
1.6 Command Profile Separate Mandatory
1.6 Command Cmd channel 1 Prog. card Recommended
1.6 Command Ref 2 switching C411 Mandatory if using Stop At Prox feature
1.7 Application Funct Fast stop assign LI3 Recommended
1.8 Fault Management Fault Reset LI4 Recommended
Table 1. Master Drive I/O Software Configuration.
Note: LI4 is preconfigured by the synchroniser program to reset a Synchroniser Fault. To
allow this input to also be used to reset a drive fault configure LI4 as in Table 1.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
16
6.2 Controller Inside Input/Outputs:
The Controller Inside card Logical Inputs are preconfigured per figure 5. Where a slave
drive is not present the input is left unconnected.
VW3 A3 501
AO52
COM
AO51
AI52
COM
AI51
LO56
LO55
LO54 SYNCHRONISER RUN
Controller Inside
LO53 MASTER INDEX OUTPUT
LO52 SYNCHRONISER FAULT
LO51 MISSING INDEX WARNING
LI60 STOP AT PROX
LI59 SLAVE 8 INDEX
LI58 SLAVE 7 INDEX
LI57 SLAVE 6 INDEX
LI56 SLAVE 5 INDEX
LI55 SLAVE 4 INDEX
+24V
COM
LI51
LI52
LI53
LI54
24VDC +24V
Supply
0V
MASTER INDEX
SLAVE 1 INDEX
SLAVE 2 INDEX
SLAVE 3 INDEX
Where a Slave drive is not
present leave the input
unconnected
Figure 5. Controller Inside I/O
6.3 Slave Drive Input/Outputs:
Figure 6 gives the recommended I/O wiring for the Slave drives and Table 2 gives the
corresponding software configuration. The Profile must be set to Separate and the Slave
drive active reference and command channels must be set to CANopen to allow
synchronising control by the Controller Inside. It is recommended that a Fast Stop be hard
wired to the logical inputs.
A1
ATV71
+24V
+10V
COM
COM
PWR
AI1+
AO1
AI1-
AI2
LI1
LI2
LI3
LI4
LI5
LI6
0V
FAULT RESET
FAST STOP
Figure 6. Recommended Slave Drive I/O Wiring
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
17
Menu Parameter Value Comment
1.6 Command Ref.1 chan CAN Mandatory
1.6 Command Stop Key priority Yes Optional
1.6 Command Profile Separate Mandatory
1.6 Command Cmd channel 1 CAN Mandatory
1.7 Application Funct Fast stop assign LI3
1.8 Fault Management Fault Reset LI4
Table 2. Slave Drive I/O Software Configuration
6.4 Maximum Speed Limit:
The maximum speed limits of the drives should be set such that the maximum speed limit
of the slave drives does not prevent them from remaining in synchronism with the Master.
6.5 CANopen Network:
1. Construct a CANopen cable from the parts described in section 7. Refer to the ATV71
CANopen manual for correct cabling procedures.
2. Connect a CANopen cable between the Controller Inside card and the Slave drives. It
is not necessary to connect the Master drive to the network. The Controller Inside card
is the CANopen Master for the Network and the Slave drives are all CANopen slaves.
3. Set the CANopen address in the slave drives according to Table 3.
Menu Parameter Value Comment
1.9 Communication CANopen address 2 (Slave 1)
3 (Slave 2)
4 (Slave 3)
The Controller Inside card
5 (Slave 4)
is preconfigured as
6 (Slave 5)
CANopen address 1.
7 (Slave 6)
8 (Slave 7)
9 (Slave 8)
1.9 Communication CANopen bit rate 125kbps The Controller Inside bit
rate is preconfigured to 125
kbps.
Table 3. Slave Drive CANopen address Configuration.
3. Cycle the power to all the drives to initialise the new CANopen parameters. And if
necessary reset any faults.
4. The red LED (1.2) on the Controller Inside card should be off. This indicates there
are no errors on the CANopen network. The status of the CANopen network can
be monitored from Menu 1.2 Monitoring Communications Map CANopen map.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
18
6.6 RPI setup:
1. Enter the approximate Revolutions/Index for each drive into screens O17, O19, O22,
O25, O28, O31, O34, 37, 40.
2. Set the Mode to Set up (screen O13).
3. Give the master drive an appropriate speed reference and a run command. All the slave
drives should also run. While in Set up mode the slave drives will not position
synchronise. They will speed follow according to the RPI ratio ie SpeedSlave = SpeedMaster
x R/ISlave / R/IMaster . Run the drives until at least 2 index proximity inputs are received for
each drive. This will allow the synchroniser to calculate the RPI for each drive.
4. Select the Master drive in the Monitor.. screen (screen O01)
5. Read the Master drive RPI from the RPI monitoring screen (O08).
6. Enter this value into the Master drive RPI configuration screen. (O17 )
7. Do steps 4 to 6 for the remaining drives.
6.7 Miscellaneous:
1. Set the Maximum Position Error and Maximum Correction Speed (screens O11 and
O12) to appropriate values.
2. Once the above steps have been carried out, set the Mode to Synch (screen O13).
Start the Master drive. The position of the slave drives should now synchronise with the
master drive after a short time.
3. Run the synchroniser. Check the Index Error and Position Error screens to ensure the
drives are remaining in synchronism. Also visually check the process to ensure
synchronism is being maintained.
6.8 Customisation of the Monitoring Display:
The top line of the ATV 71 display is referred to as the Parameter Bar. This can be
customised to display parameters that are peculiar to the synchroniser. Refer to Menu 6.1
PARAMETER BAR SELECT to select the parameters you wish to display.
Figure 7. Customised Monitoring Display
Also the Monitoring Display of the ATV 71 display can be customised to display a list of
variables or bargraphs. Refer to Menu 6.2 MONITOR SCREEN TYPE.
If a bargraph is configured the maximum value of the graph will be equal to 120%.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
19
7 Synchroniser Parts
When ordering an ATV71 Position Synchroniser the parts described in Table 4 must be ordered in addition
to the ATV71 drives required.
Schneider Part
Description Quantity Note
Number
With ATV71 Position
Controller Inside card VW3 A3 501 One
Synchroniser S/W loaded.
CANopen adapter VW3 CAN A71 One per slave drive
One per slave drive
1 VW3 CAN KCDF
CANopen connector and one for the CI Erni part number 154824
180T
card
Refer to the ATV71 Various lengths and types are
CANopen cable
Catalogue available
Table 4 - Synchroniser parts
Figure 9. CANopen Adapter VW3CANA71
Figure 8 CANopen Connector VW3 CANKCDF180T
(Erni part no 154.824)
Figure 10. CANopen Connector
(Erni part no 154.039)
1
Ernie part number 154-039 may be used in place of 154-824. This connector is an axial type (ie it is not offset) so it
fits the Controller Inside card better. It is not available from Schneider so it must be purchased directly from Erni.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
20
8 Status Messages
The Synchroniser status can be view in screen O02 of Synchroniser Menu 1.14. Also the
Synchroniser has its own set of fault messages which are displayed in this screen.
Status Codes
Status Display Description
Long Short
Sync Dsbl SyDsd Synchronising disabled. Synchronising is disabled
until the first index pulse after power up, if in setup
mode or if a Stop at Prox has been initiated.
Sync Run SyRun Master drive has received 1 index pulse since power
up. Synchronising is enabled if the slave drive has
also received one index pulse.
SlXMisIdx xMsIdx Slave X drive has missed at least 1 missing index
MasMisidx MMsIdx The Master drive has missed at least 1 index pulse
StpAtProx SpPrx The drives will stop at the next proximity switch.
SlXPosFlt xPsFt A position fault has occurred on Slave X
SlXIdxFlt xIxFt A index fault has occurred on Slave X
MasIdxFlt MIxFt An index fault has occurred on the Master drive.
SlXCANFlt xCnFt A CANopen fault has occurred on Slave X
CAN Flt CnFt A CANopen general fault has occurred.
SlXDrvFlt xDvFt A fault has occurred with Slave X drive.
MasDrvFlt MDvFt A fault has occurred with the Master drive.
Figure 11. Status Messages
Note: X = Any of Slave 1 to 8.
If the Controller Inside is configured as the Command an Application Fault will be triggered.
If the Controller Inside is not configured as the Command an External Fault will be
triggered.
9 Synchroniser Faults.
There are 4 types of faults that are generated by the ATV71 Synchroniser. If any of these
faults occur the drive will trip and the fault message SYNCH Flt will be displayed. To
narrow down the cause of the fault see the status message in Menu 1.14.
2. Position Fault. A Position Fault is generated when the difference between the
Master and Slave positions (position error) exceeds the maximum allowable
amount set in screen O13. The status message will indicate which Slave drive has
the fault. Ie the status message Sl6PosFlt indicates a position fault with Slave 6
drive. A Position Fault is recognized only after the Master and Slave drive have
both received 3 index pulses after power up or a reset. The actual position error
can be viewed in screen O05 of the Synchroniser Menu 1.14
3. Index Fault. There are 2 types of index faults:
(1) Index Error: The index error is the difference between the actual motor
revolutions between index pulses and expected revolutions entered into
screens O17, O19, O22, O25, O28, O31, O37 and O40. If the index error
exceeds the maximum allowable set in screen O13 an Index Fault will be
generated. An index error is recognized only after the drive has received 3
index pulses after power up or a reset. The actual index error can be viewed
in screen O06 of the Synchroniser Menu 1.14.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
21
(2) Missing Index. An index is assumed to have been missed if an index pulse
has not been received within the expected no of revolutions. The expected
revolutions is equal to the R/I for the drive concerned plus the maximum
allowable Index Error set in screen O13 of the Synchroniser Menu 1.14. If the
number of consecutive missed index pulses exceeds the amount set in
screen O14 an Index fault will be generated. The actual number of
consecutive missed index pulses can be viewed in screenO07 of the
Synchroniser Menu 1.14.
The status message will indicate which drive has the fault. Ie the status message
MasIdxFlt indicates an Index fault with the Master drive.
4. CAN Fault. A CANopen fault is generated if a fault is detected with the CANopen
network.
A CANopen fault can also be generated by a Slave drive. In this case the Slave
drive concerned will indicate a CANopen fault and the Master will indicate a Drive
Fault with the corresponding Slave drive.
5. Drive fault. A Drive Fault is generated if a fault in any drive in the network is
detected. To narrow down the cause of the fault see the display in the
corresponding drive.
If 2 faults occur at the same time priority is given to the lower fault in Figure 11.
In the event of a resetable fault on any of the drives it may be reset using the reset input on
the master drive. Sometimes 2 reset inputs my have to be given. One to reset the Slave
and then another to reset the Master. Some faults can only be reset by cycling the power
(refer to the ATV71 Simplified Manual).
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
22
10 Commissioning Parameter Record Sheets and I/O Assignment for Master Drive
10.1 Drive and Motor details.
Drive No: Model:
Location:
Motor kW: Amps:
Volts: RPM:
Recorded
By: Date:
10.2 Functions Assigned to I/O Master & Controller Inside
Master I/O Functions Assigned CI I/O Functions Assigned
LI1 LI51
LI2 LI52
LI3 LI53
LI4 LI54
LI5 LI55
LI6 LI56
R1 LI57
R2 LI58
AI1 LI59
AI2 LI60
AO1 LO51
Encoder LO52
Logic Input Sw LO53
LI6 Input Sw LO54
LO56
AI51
AI52
AO51
AO52
10.3 Menu 1.1 Simply Start Parameters - Master Drive
(no setting entered means the default setting is used)
Code Name Customer Setting Code Name Customer Setting
tCC 2/3 wire control nSP Rated mot speed
CFG Macro Config tFr Max frequency
bFr Stan Mot freq tUn Auto-tuning
IPL Input phase loss PHr Output Ph rotate
nPr Rated mot power
Uns Rated mot volt
nCr Rated mot Current
Frs Rated mot Freq
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
23
10.4 Menu 1.14 Synchroniser Parameters Master Drive
(no setting entered means the default setting is used)
Code Name Customer Setting Code Name Customer Setting
O10 No. Of Slaves O28 Slv 4 R/I
O11 Mode O29 Slv 4 OffSet
O12 Max corct Spd O31 Slv 5 R/I
O13 Max Pos Err O32 Slv 5 OffSet
O14 Max Missing Idx O34 Slv 6 R/I
O15 Gain O35 Slv 6 OffSet
O16 Debounce O37 Slv 7 R/I
O17 Master R/I O38 Slv 7 OffSet
O19 Slv 1 R/I O40 Slv 8 R/I
O20 Slv 1 OffSet O41 Slv 8 OffSet
O22 Slv 2 R/I O48 CAN Flts
O23 Slv 2 OffSet O50 909480IE02c (program version, read only)
O25 Slv 3 R/I
O26 Slv 3 OffSet
10.5 Other Parameters Master Drive
(table to be created by the user)
Code Name Customer Setting Code Name Customer Setting
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
24
11 Commissioning Parameter Record Sheets I/O Assignment for Slave Drives
11.1 Drive and Motor details.
Slv1 Slv2 Slv3 Slv4
Drive No:
Location:
Model:
Motor kW:
Amps:
Volts:
RPM:
Recorded
By:
Date:
Slv5 Slv6 Slv7 Slv8
Drive No:
Location:
Model:
Motor kW:
Amps:
Volts:
RPM:
Recorded
By:
Date:
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
25
11.2 Functions Assigned to I/O Slave Drives
(no setting entered means the default setting is used)
I/O Slv1 Slv2 Slv3 Slv4
LI1
LI2
LI3
LI4
LI5
LI6
R1
R2
AI1
AI2
AO1
Encoder
Logic Input Sw
I/O Slv5 Slv6 Slv7 Slv8
LI1
LI2
LI3
LI4
LI5
LI6
R1
R2
AI1
AI2
AO1
Encoder
Logic Input Sw
11.3 Menu 1.1 Simply Start Parameters Slave Drives
(no setting entered means the default setting is used)
Code Name Slv1 Slv2 Slv3 Slv4
tCC 2/3 wire control
CFG Macro Config
bFr Stan Mot freq
IPL Input phase loss
nPr Rated mot power
Uns Rated mot volt
nCr Rated mot Current
Frs Rated mot Freq
nSP Rated mot speed
tFr Max frequency
tUn Auto-tuning
PHr Output Ph rotate
ItH Mot therm current
ACC Acceleration
dEC Deceleration
LSP Low speed
HSP High Speed
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
26
Code Name Slv5 Slv6 Slv7 Slv8
tCC 2/3 wire control
CFG Macro Config
bFr Stan Mot freq
IPL Input phase loss
nPr Rated mot power
Uns Rated mot volt
nCr Rated mot Current
Frs Rated mot Freq
nSP Rated mot speed
tFr Max frequency
tUn Auto-tuning
PHr Output Ph rotate
ItH Mot therm current
ACC Acceleration
dEC Deceleration
LSP Low speed
HSP High Speed
11.4 Other Parameters Slave Drives
(table to be created by the user)
Code Name Slv1 Slv2 Slv3 Slv4
Code Name Slv5 Slv6 Slv7 Slv8
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
27
12 Documentation/Manuals
ATV71 Simplified Manual
The main manual required for basic ATV71 installation, programming and fault finding.
Controller Inside Manual
The main manual required for installation and wiring of the Controller Inside card.
ATV71 Installation Manual
A comprehensive description of the installation and wiring of the ATV71
ATV71 Programming Manual
A comprehensive description of all the ATV71 functions and parameters.
ATV71 Communication Parameters
Contains a list of the ATV71 parameter addresses and describes the various operating modes specific to
serial communications. Not required if the start/stop and reference controls to the Master are achieved via
the standard digital and analogue I/O.
ATV71 CANopen Manual
Contains useful information on the connection and diagnostics of the CANopen Network. However all the
information required for setting up the Synchroniser CANopen Network is contained in this Addendum.
Modbus, Ethernet, Profibus, INTERBUS, Uni-Telway, FIPIO, Modbus Plus, & DeviceNet Manuals
These manuals are not required unless the corresponding protocol is required for remote control and
supervision of the Synchroniser. Normally only the Master drive would be controlled.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
28
13 Glossary
ATV. Abbreviation for Aptiva, The name given to the Telemecanique range of variable
speed drives.
ATV58. The generation of Telemecanique variable speed drive which is superseded by the
ATV71.
ATV71. The new generation of PDL and Telemecanique variable speed drive containing
advanced control and communication functions.
CANopen. An industrial serial communications protocol adopted by PDL and Telemecanique
for use with the ATV71 variable speed drives. The ATV71 Synchroniser CANopen
network consists of a CANopen Master and up to 8 Slaves. CANopen employs
special connectors and twisted pair cable.
Command. The ATV71 start and stop commands.
Controller Inside. An option card which can be fitted into the ATV71 drive. In the case of the ATV71
Synchroniser it contains synchronising control software and is also the CANopen
master.
Elite Series. The current generation PDL variable speed drives which will eventually be
superseded by the ATV71.
Index. An input to the Controller Inside Card indicating the process position.
Offset. Position offset means a continuous out of synchronism by a set amount.
Profile. The different input/output configurations supported by the ATV71. The ATV71
Synchroniser uses the Sperate Profile.
LI. See Logical Input
Logical Input A digital Input. The ATV71 has 6 Logical Inputs named LI1 to LI6. The Controller
Inside card has 10 Logical Inputs named LI51 to LI60.
Master. The drive that sets the speed of the synchroniser system. The Controller Inside is
fitted into the Master drive.
Revolutions Per Index. Motor revolutions per index pulse
R/I. See Revolutions Per Index.
Slave. The drive that changes speed to match the position of the Master drive. A Slave
drive is also a CANopen slave.
ATV71 Synchroniser Manual Addendum PDL Part No. 90948001c
29
14 Index
Bargraph, 18 Parameter Bar, 18
CANopen, 3, 17 Position Monitoring, 3
Fault message, 20 Power Up, 3
I/O R/I. See Revolutions per index
Controller Inside Card, 16 Revolutions per Index, 3, 7
Master Drive, 15 Specifications, 2
Slave Drive, 16 Status Codes, 20
Index Monitoring, 3 Synchroniser Faults, 20
Index Pulse, 3 Synchroniser Screens, 5
Offset, 3
ATV71 Synchroniser Manual Addendum PDL Part No. 90948011c
2
PDL Electronics Ltd is an international leader in AC motor drive development offering a
range of advanced motor drives to handle every industrial application. Our customer support
program and Quality Assurance system makes the PDL product, regardless of price, less
expensive than other controllers, in the long term. Offices and distributors worldwide provide
continuous technical support that guarantees quality service and expert advice form delivery
to operation of your installation.
As a member of the Schneider Electric group, PDL Electronicss product range and
renowned effectiveness in high power drive applications, consolidates Schneider Electrics
position as the global leader in industrial motor control.
HEAD OFFICE
81 Austin Street, Napier, New Zealand
Phone +64-6-843 5855 Fax +64-6-843 5185
Internet www.pdlelectronics.com
Email emarketing@pdlelectronics.com
Distributors in countries worldwide.
Distributed by
ATV71 Synchroniser Manual Addendum PDL Part
PDL Number 90344-0-11 Rev B
Part No. 90948001c
Vous aimerez peut-être aussi
- Motion Control ReportD'EverandMotion Control ReportÉvaluation : 4 sur 5 étoiles4/5 (1)
- Ud1177d APFIF131 LineSynchDocument131 pagesUd1177d APFIF131 LineSynchCatalin PelinPas encore d'évaluation
- Vacon NXP Line Sync APFIF131 Application Manual UDDocument130 pagesVacon NXP Line Sync APFIF131 Application Manual UDTanuTiganuPas encore d'évaluation
- 24V1 Spray Controller: Operator S ManualDocument57 pages24V1 Spray Controller: Operator S Manualmacguyver66Pas encore d'évaluation
- 011 - 1.4 - LC-Series-Software-Manual-122x32-displayDocument45 pages011 - 1.4 - LC-Series-Software-Manual-122x32-displaykulanthaiveluksaPas encore d'évaluation
- Software Operational Manual: Hybrid Servo Drive HBS57/86/86HDocument25 pagesSoftware Operational Manual: Hybrid Servo Drive HBS57/86/86Hhuutan12345Pas encore d'évaluation
- Commissioning Quick Reference - PMI Auto-TuningDocument28 pagesCommissioning Quick Reference - PMI Auto-TuningDariusPas encore d'évaluation
- Apresentacao PCC1301 DisplayDocument32 pagesApresentacao PCC1301 DisplayJaffer HussainPas encore d'évaluation
- NERS Operation Manual V5.5Document43 pagesNERS Operation Manual V5.5Guillermo StiflerPas encore d'évaluation
- Bulletin 1336VT Adjustable Frequency AC Drive: Programming ManualDocument87 pagesBulletin 1336VT Adjustable Frequency AC Drive: Programming ManualjoaoPas encore d'évaluation
- Manual de Servicio Foropter Digital Huvitz HDR-7000Document38 pagesManual de Servicio Foropter Digital Huvitz HDR-7000Gustavo RodriguezPas encore d'évaluation
- Quick Startup Guide For Simovert Masterdrives 6se70 VC Standardized Fan ApplicationDocument30 pagesQuick Startup Guide For Simovert Masterdrives 6se70 VC Standardized Fan ApplicationchochoroyPas encore d'évaluation
- ACS880 Drives With Primary Control Program: Quick Start-Up GuideDocument146 pagesACS880 Drives With Primary Control Program: Quick Start-Up Guidesykimk8921Pas encore d'évaluation
- Control Solutions: Atlas CopcoDocument30 pagesControl Solutions: Atlas CopcoВладислав СередаPas encore d'évaluation
- Manual de Servicio Philis 40pfl4706f7Document66 pagesManual de Servicio Philis 40pfl4706f7Rodolfo CarruyoPas encore d'évaluation
- 4d80d4db PDFDocument623 pages4d80d4db PDFPalaniappan SolaiyanPas encore d'évaluation
- User Manual: EPP2000 - Intelligent Positioner Control UnitDocument22 pagesUser Manual: EPP2000 - Intelligent Positioner Control UnitKelvin Anthony OssaiPas encore d'évaluation
- User Manual: HSC960 Genset ControllerDocument38 pagesUser Manual: HSC960 Genset ControllerrasyidiniPas encore d'évaluation
- Service Manual: 40" LCD TVDocument53 pagesService Manual: 40" LCD TVDoyle BarrentinePas encore d'évaluation
- Parameter Manual. Сервопривод (B-65270en)Document702 pagesParameter Manual. Сервопривод (B-65270en)Богинский Сергей100% (1)
- PPM Users Manual Signature SoftwareDocument48 pagesPPM Users Manual Signature SoftwareJavier VázquezPas encore d'évaluation
- GC AFTGuideDocument32 pagesGC AFTGuideaguirreperezPas encore d'évaluation
- Mercury SmartCraft Operations ManualDocument96 pagesMercury SmartCraft Operations ManualQueremosabarrabás A Barrabás100% (1)
- 1201C GNSS - Arbiter - ManualDocument228 pages1201C GNSS - Arbiter - ManualAldrin Andrés Martínez (Fonkel Mexicana)Pas encore d'évaluation
- 511N IstructionDocument37 pages511N IstructionDenilson GarciaPas encore d'évaluation
- Renault Re-Prog Procedure (ENG)Document21 pagesRenault Re-Prog Procedure (ENG)lavoinePas encore d'évaluation
- DEC2 Tuning and Calibration PDFDocument18 pagesDEC2 Tuning and Calibration PDFbagus100% (2)
- 8 074 141 03-03 Operating ManualDocument91 pages8 074 141 03-03 Operating ManualDani HpPas encore d'évaluation
- Altivar71 Programacion Variador de FrecuenciaDocument313 pagesAltivar71 Programacion Variador de FrecuenciaElpanita3Pas encore d'évaluation
- Software Manual of The Easy Servo Drives: ES-D508, ES-D808, ES-D1008, ES-D1208 & ES-D2306Document27 pagesSoftware Manual of The Easy Servo Drives: ES-D508, ES-D808, ES-D1008, ES-D1208 & ES-D2306joromsalPas encore d'évaluation
- Renault ReProg Procedure ENDocument21 pagesRenault ReProg Procedure ENNelson SousaPas encore d'évaluation
- Manual Altivar 71Document291 pagesManual Altivar 71Alberto Coronado OceguedaPas encore d'évaluation
- 9606 041en HV V2019 PDFDocument32 pages9606 041en HV V2019 PDFArturo R. MalavéPas encore d'évaluation
- Appendix B - VFD Speed Control V1 0Document8 pagesAppendix B - VFD Speed Control V1 0palmerr23Pas encore d'évaluation
- User Manual: 1305 Adjustable Frequency AC Drive (Series C)Document170 pagesUser Manual: 1305 Adjustable Frequency AC Drive (Series C)6612poolPas encore d'évaluation
- Transmission A40F Functional CheckDocument2 pagesTransmission A40F Functional CheckMrAlbert2009100% (1)
- Manual Controladora NVCNC - NCH02 - ENDocument51 pagesManual Controladora NVCNC - NCH02 - ENAlexPas encore d'évaluation
- WT61P805Document54 pagesWT61P805Paulo Henrique SPas encore d'évaluation
- QT601 2 PRGM Manual 4Document42 pagesQT601 2 PRGM Manual 4Radu PopescuPas encore d'évaluation
- Volvo Penta MD 11Document44 pagesVolvo Penta MD 11Holger BoevingPas encore d'évaluation
- Service Manual 426-430Document207 pagesService Manual 426-430mike100% (2)
- Mduhm20703a En01Document24 pagesMduhm20703a En01hintetimarwenPas encore d'évaluation
- Vacon 20 X D BH Application Manual DPD01381BDocument72 pagesVacon 20 X D BH Application Manual DPD01381BDoan DaiPas encore d'évaluation
- hct6000 Manual PDFDocument181 pageshct6000 Manual PDFGerman DfrPas encore d'évaluation
- Saht730 DVD Theater Receiver PDFDocument23 pagesSaht730 DVD Theater Receiver PDFRichard KxorrolokoPas encore d'évaluation
- User Manual: Capture QualityDocument32 pagesUser Manual: Capture QualityMuhammad AwanPas encore d'évaluation
- Rds Ratemaster 200 (EN)Document21 pagesRds Ratemaster 200 (EN)VicPas encore d'évaluation
- System Description - Lane Change Assist (Audi Side Assist)Document10 pagesSystem Description - Lane Change Assist (Audi Side Assist)ergdegPas encore d'évaluation
- Smartcraft User-Manual-13275 - (Manymanuals - It)Document60 pagesSmartcraft User-Manual-13275 - (Manymanuals - It)68paolosPas encore d'évaluation
- Fuel Conditioning SystemDocument59 pagesFuel Conditioning SystemMERTAL JAYA ABADIPas encore d'évaluation
- 32pfl4508 PDFDocument50 pages32pfl4508 PDFStevenson GodoyPas encore d'évaluation
- Vacon CX and EtcDocument317 pagesVacon CX and EtcKashif Nadeem100% (1)
- B-65270EN Motori - 08 PDFDocument644 pagesB-65270EN Motori - 08 PDFvasiliy vasilievichPas encore d'évaluation
- Tonoport - V 2.1Document38 pagesTonoport - V 2.1David SantamariaPas encore d'évaluation
- ServiceDocument51 pagesServiceAN GPas encore d'évaluation
- AOC E1621swb LCD Monitor PDFDocument64 pagesAOC E1621swb LCD Monitor PDFSalvadorRodriguesPas encore d'évaluation
- DashBoard ManualDocument43 pagesDashBoard ManualAugusto NuñezPas encore d'évaluation
- P Ex Valve Controller PugDocument18 pagesP Ex Valve Controller PugmikiPas encore d'évaluation
- AMD ServoDrive - Configuration GuideDocument233 pagesAMD ServoDrive - Configuration GuideCristian SilvaPas encore d'évaluation
- FRWTMCver413eng PDFDocument168 pagesFRWTMCver413eng PDFdrakula85100% (1)
- Contactor 40 ADocument3 pagesContactor 40 AJWPas encore d'évaluation
- Smith Chart From Black Magic DesignDocument1 pageSmith Chart From Black Magic DesignkgrhoadsPas encore d'évaluation
- Atv31 Programming Manual en v1Document77 pagesAtv31 Programming Manual en v1Vali PetricelePas encore d'évaluation
- Atv11 HU18M2E - Actionare Masina de Masurat Grosimi PDFDocument25 pagesAtv11 HU18M2E - Actionare Masina de Masurat Grosimi PDFRata IonPas encore d'évaluation
- Atv11 HU18M2E - Actionare Masina de Masurat Grosimi PDFDocument25 pagesAtv11 HU18M2E - Actionare Masina de Masurat Grosimi PDFRata IonPas encore d'évaluation
- Kingroon ConfiguracoesDocument3 pagesKingroon ConfiguracoesanafrancaPas encore d'évaluation
- GNSS COrs SystemDocument20 pagesGNSS COrs SystemKostPutriMalangPas encore d'évaluation
- The Perception of Luxury Cars MA Thesis 25 03Document60 pagesThe Perception of Luxury Cars MA Thesis 25 03Quaxi1954Pas encore d'évaluation
- Setting and Plot: Old YellerDocument8 pagesSetting and Plot: Old YellerWalid AhmedPas encore d'évaluation
- Democracy or Aristocracy?: Yasir MasoodDocument4 pagesDemocracy or Aristocracy?: Yasir MasoodAjmal KhanPas encore d'évaluation
- Cornish BoilerDocument3 pagesCornish BoilerDeepak KV ReddyPas encore d'évaluation
- MC4 CoCU 6 - Welding Records and Report DocumentationDocument8 pagesMC4 CoCU 6 - Welding Records and Report Documentationnizam1372100% (1)
- RESEARCHDocument5 pagesRESEARCHroseve cabalunaPas encore d'évaluation
- Some Studies On Structure and Properties of Wrapped Jute (Parafil) YarnsDocument5 pagesSome Studies On Structure and Properties of Wrapped Jute (Parafil) YarnsVedant MahajanPas encore d'évaluation
- MATH 304 Linear Algebra Lecture 9 - Subspaces of Vector Spaces (Continued) - Span. Spanning Set PDFDocument20 pagesMATH 304 Linear Algebra Lecture 9 - Subspaces of Vector Spaces (Continued) - Span. Spanning Set PDFmurugan2284Pas encore d'évaluation
- World BankDocument28 pagesWorld BankFiora FarnazPas encore d'évaluation
- 2396510-14-8EN - r1 - Service Information and Procedures Class MDocument2 072 pages2396510-14-8EN - r1 - Service Information and Procedures Class MJuan Bautista PradoPas encore d'évaluation
- Presentation LI: Prepared by Muhammad Zaim Ihtisham Bin Mohd Jamal A17KA5273 13 September 2022Document9 pagesPresentation LI: Prepared by Muhammad Zaim Ihtisham Bin Mohd Jamal A17KA5273 13 September 2022dakmts07Pas encore d'évaluation
- Sousa2019 PDFDocument38 pagesSousa2019 PDFWilly PurbaPas encore d'évaluation
- Effects of Corneal Scars and Their Treatment With Rigid Contact Lenses On Quality of VisionDocument5 pagesEffects of Corneal Scars and Their Treatment With Rigid Contact Lenses On Quality of VisionJasmine EffendiPas encore d'évaluation
- Dress Code19sepDocument36 pagesDress Code19sepapi-100323454Pas encore d'évaluation
- The Sandbox Approach and Its Potential For Use inDocument13 pagesThe Sandbox Approach and Its Potential For Use invalentina sekarPas encore d'évaluation
- 한국항만 (영문)Document38 pages한국항만 (영문)hiyeonPas encore d'évaluation
- Coal Mining Technology and SafetyDocument313 pagesCoal Mining Technology and Safetymuratandac3357Pas encore d'évaluation
- QSasDocument50 pagesQSasArvin Delos ReyesPas encore d'évaluation
- Technical Rockwell Automation FactoryTalk HistorianDocument6 pagesTechnical Rockwell Automation FactoryTalk HistorianAmit MishraPas encore d'évaluation
- Mossbauer SpectrosDocument7 pagesMossbauer SpectroscyrimathewPas encore d'évaluation
- Catalogue - Central Battery SystemDocument12 pagesCatalogue - Central Battery SystemarifzakirPas encore d'évaluation
- Linux and The Unix PhilosophyDocument182 pagesLinux and The Unix PhilosophyTran Nam100% (1)
- Pre-Paid Customer Churn Prediction Using SPSSDocument18 pagesPre-Paid Customer Churn Prediction Using SPSSabhi1098Pas encore d'évaluation
- What Is Urban PlanningDocument33 pagesWhat Is Urban PlanningDivine Grace FernandoPas encore d'évaluation
- 835 (Health Care Claim PaymentAdvice) - HIPAA TR3 GuideDocument306 pages835 (Health Care Claim PaymentAdvice) - HIPAA TR3 Guideअरूण शर्माPas encore d'évaluation
- Grua Grove 530e 2 Manual de PartesDocument713 pagesGrua Grove 530e 2 Manual de PartesGustavo100% (7)
- Random Questions From Various IIM InterviewsDocument4 pagesRandom Questions From Various IIM InterviewsPrachi GuptaPas encore d'évaluation