Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Acutronic Fabian Ventilator Service ManualDocument1 pageAcutronic Fabian Ventilator Service ManualIsmael Pérez Ruiz0% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- MCU Public 001-89679 0SDocument31 pagesMCU Public 001-89679 0SIsmael Pérez RuizPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Home Vent GuideDocument27 pagesHome Vent GuideIsmael Pérez RuizPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Fabian Ventilator ManualDocument1 pageFabian Ventilator ManualIsmael Pérez RuizPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- ALightweightQRSDetectorforSingleLeadECGSignalsusingaMax MinDifferenceAlgorithmDocument16 pagesALightweightQRSDetectorforSingleLeadECGSignalsusingaMax MinDifferenceAlgorithmIsmael Pérez RuizPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Module 3 - December 16 2009Document45 pagesModule 3 - December 16 2009Ismael Pérez Ruiz100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Wlzard 230: Instructions For UseDocument2 pagesWlzard 230: Instructions For UseIsmael Pérez RuizPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- MGC PatientTestingSupplies 150206Document2 pagesMGC PatientTestingSupplies 150206Ismael Pérez RuizPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hossana-Hillsong PartituraDocument7 pagesHossana-Hillsong PartituraIsmael Pérez RuizPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- InTech-Modeling in Respiratory Movement Using Labview and SimulinkDocument26 pagesInTech-Modeling in Respiratory Movement Using Labview and SimulinkIsmael Pérez RuizPas encore d'évaluation
- Seriesdefourier Ismael Perez Ruiz Biomedica 6DM PDFDocument2 pagesSeriesdefourier Ismael Perez Ruiz Biomedica 6DM PDFIsmael Pérez RuizPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Hospital Bed B-1000 Pro BrochureDocument2 pagesHospital Bed B-1000 Pro BrochureIsmael Pérez RuizPas encore d'évaluation
- Perfusion IndexDocument6 pagesPerfusion IndexIsmael Pérez RuizPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Library Guide Virtex-II ProDocument1 180 pagesLibrary Guide Virtex-II ProIsmael Pérez RuizPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Simulation of The Production of Sulfuric Acid From A Sulfur-Burning Single-Absorption Contact Sulfuric Acid PlantDocument5 pagesSimulation of The Production of Sulfuric Acid From A Sulfur-Burning Single-Absorption Contact Sulfuric Acid PlantainmnrhPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Interpretation of Incomplete Piezocone Dissipation TestsDocument358 pagesThe Interpretation of Incomplete Piezocone Dissipation Testsmaroof nahinPas encore d'évaluation
- DKD-R - 6-1 2014Document39 pagesDKD-R - 6-1 2014japofff100% (1)
- Se Single Phase Inverter DatasheetDocument2 pagesSe Single Phase Inverter DatasheetsabrahimaPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
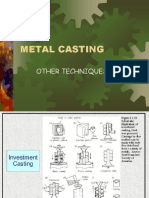
- Prosprod I Casting Process (2) - Part2 PDFDocument36 pagesProsprod I Casting Process (2) - Part2 PDFPandu WibowoPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- MASERDocument23 pagesMASERMuzzamil ShaikhPas encore d'évaluation
- A Handbook of Minerals, Crystals, Rocks and Ores by Pramod O. AlexanderDocument22 pagesA Handbook of Minerals, Crystals, Rocks and Ores by Pramod O. AlexanderBee PshPas encore d'évaluation
- Sheet Pile Wall IntroductionDocument19 pagesSheet Pile Wall IntroductionSâu HeoPas encore d'évaluation
- Especificaciones Nivel PentaxDocument2 pagesEspecificaciones Nivel PentaxVeronica SimonettiPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Pcs 0626Document11 pagesPcs 0626Diêm Công ViệtPas encore d'évaluation
- Form One Integrated Science End of Year ExamDocument10 pagesForm One Integrated Science End of Year ExamMiss Rambaran100% (2)
- AnatoFisio VestibularDocument17 pagesAnatoFisio VestibularRocío YáñezPas encore d'évaluation
- Mills - CatalogDocument4 pagesMills - Catalogdéborah_rosalesPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Week 3 Earth Science FINALDocument4 pagesWeek 3 Earth Science FINALMichael DelivaPas encore d'évaluation
- 2nd Year Math Guess PaperDocument6 pages2nd Year Math Guess PaperArmaan MalikPas encore d'évaluation
- Fabrication Layout Design Rules 2005Document28 pagesFabrication Layout Design Rules 2005lai_infoPas encore d'évaluation
- 4.3 Forced WavesDocument23 pages4.3 Forced WavesPritib KumarPas encore d'évaluation
- Scrubber ManualDocument41 pagesScrubber ManualRahul Sonkamble100% (1)
- Liebherr STS Ship To Shore Container Gantry Cranes Technical Description 12469-0Document4 pagesLiebherr STS Ship To Shore Container Gantry Cranes Technical Description 12469-0sheron100% (2)
- Some Aspects of Metallurgical Assessment of Boiler Tubes-Basic Principles and Case StudiesDocument10 pagesSome Aspects of Metallurgical Assessment of Boiler Tubes-Basic Principles and Case StudiesmsdoharPas encore d'évaluation
- Fisika ModernDocument79 pagesFisika ModernEndah RahmawatiPas encore d'évaluation
- Ecoupled Understanding Wireless PowerDocument14 pagesEcoupled Understanding Wireless PowerLeon BurgerPas encore d'évaluation
- AQA GCSE Chemistry AnswersDocument14 pagesAQA GCSE Chemistry AnswersErvin MetushiPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Thermodynamic Optimization of A Trigeneration System Based On Biomass CombustionDocument9 pagesThermodynamic Optimization of A Trigeneration System Based On Biomass CombustionTiago HenriquesPas encore d'évaluation
- Antenna Radiation Electromagnetic Electrical Resistance Ohm MeterDocument6 pagesAntenna Radiation Electromagnetic Electrical Resistance Ohm Meterbiswa217Pas encore d'évaluation
- PVC& CPVC SCH 80 Technical CatalogueDocument49 pagesPVC& CPVC SCH 80 Technical CataloguekailashPas encore d'évaluation
- JIS F 2023 Chain Stopper For Dia.34-36mm Anchor ChainDocument7 pagesJIS F 2023 Chain Stopper For Dia.34-36mm Anchor ChainusnadiPas encore d'évaluation
- CS3205 A8Document10 pagesCS3205 A8Rian BattlaxPas encore d'évaluation
- Line List DAR TBCDocument3 pagesLine List DAR TBChafizszul AmirushamPas encore d'évaluation
- 5.2 Production Facilities PDFDocument110 pages5.2 Production Facilities PDFJohn Cooper100% (5)