Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- DFD Exercises With SolutionsDocument14 pagesDFD Exercises With Solutions_NUKE_67% (3)
- Final Review: Erin KeithDocument25 pagesFinal Review: Erin Keithmaya fisherPas encore d'évaluation
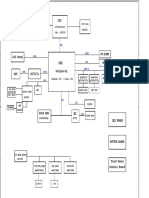
- (DELL) 一款七寸平板电脑原理图JWT - V1A - 0721 - 16P2 PDFDocument30 pages(DELL) 一款七寸平板电脑原理图JWT - V1A - 0721 - 16P2 PDFsamuelPas encore d'évaluation
- 06 Albert Vidal MecaluxDocument33 pages06 Albert Vidal MecaluxVu NguyenPas encore d'évaluation
- Oracle Inventory Latest 111130132449 Phpapp02Document207 pagesOracle Inventory Latest 111130132449 Phpapp02Vu NguyenPas encore d'évaluation
- Inbound Processes: P WM P IM C A T WM T IMDocument22 pagesInbound Processes: P WM P IM C A T WM T IMVu NguyenPas encore d'évaluation
- DM00042534 TimerDocument37 pagesDM00042534 TimerVu NguyenPas encore d'évaluation
- Sentence Patterns: English For Language TeachersDocument35 pagesSentence Patterns: English For Language TeachersSchahyda Arley100% (2)
- Tiers PDFDocument13 pagesTiers PDFAditya BalodiPas encore d'évaluation
- Emc Vplex Virtual Edition: SpecificationsDocument2 pagesEmc Vplex Virtual Edition: SpecificationsHooman MohagheghPas encore d'évaluation
- Useful Oracle RACDocument5 pagesUseful Oracle RACAkin AkinmosinPas encore d'évaluation
- BTEC Unit 3Document36 pagesBTEC Unit 3Rini SandeepPas encore d'évaluation
- Xi CS SQP Set 1Document2 pagesXi CS SQP Set 1AdityaPas encore d'évaluation
- CN Experiment 1-7Document21 pagesCN Experiment 1-7Akash PalPas encore d'évaluation
- Globalization and Localization in ASPDocument51 pagesGlobalization and Localization in ASPRaghu GowdaPas encore d'évaluation
- Poweredge-R210-2 - Setup Guide - En-UsDocument52 pagesPoweredge-R210-2 - Setup Guide - En-UsSistemas IT GefarcaPas encore d'évaluation
- (ROM) (2.3.3) XWJVH, XWJVB, XWJVA and XXJVK Gingerbread (Download)Document8 pages(ROM) (2.3.3) XWJVH, XWJVB, XWJVA and XXJVK Gingerbread (Download)diegoesPas encore d'évaluation
- Dell PowerEdge R740 Rack Server 111Document3 pagesDell PowerEdge R740 Rack Server 111Tahir TaisnPas encore d'évaluation
- Basis 3 Years ExpDocument4 pagesBasis 3 Years ExpSurya NandaPas encore d'évaluation
- Design of 8: 1 Multiplexer Using When-Else Concurrent Statement (Data Flow Modeling Style)Document2 pagesDesign of 8: 1 Multiplexer Using When-Else Concurrent Statement (Data Flow Modeling Style)dineshvhavalPas encore d'évaluation
- Unix Lab Manual Part B PDFDocument12 pagesUnix Lab Manual Part B PDFManoj BEPas encore d'évaluation
- 16-Bit Language Tools Libraries 51456FDocument248 pages16-Bit Language Tools Libraries 51456Fthienthuy232Pas encore d'évaluation
- DBMS - Types of Databases.3Document8 pagesDBMS - Types of Databases.3SHIWANI PAL CS-18Pas encore d'évaluation
- 302 002 576 Troubleshooting ChecklistDocument18 pages302 002 576 Troubleshooting ChecklistMahmood SafariPas encore d'évaluation
- MVI69 AFC DatasheetDocument3 pagesMVI69 AFC Datasheet김윤식Pas encore d'évaluation
- Task ListDocument3 pagesTask ListIan JekoniahPas encore d'évaluation
- Lab 0 Manual: COS 495 - Autonomous Robot NavigationDocument6 pagesLab 0 Manual: COS 495 - Autonomous Robot NavigationCh ZainPas encore d'évaluation
- PROGREFDocument309 pagesPROGREFJaume Sevil de PePas encore d'évaluation
- ThinkPad Stack Quick Setup GuideDocument2 pagesThinkPad Stack Quick Setup Guide276763420Pas encore d'évaluation
- Manually Installing An Oracle Solaris 11.4 SystemDocument44 pagesManually Installing An Oracle Solaris 11.4 Systemerrr33Pas encore d'évaluation
- Conky Scale of The Conky GraphDocument2 pagesConky Scale of The Conky GraphTiago21Pas encore d'évaluation
- Aix-Configure SNMP On AixDocument2 pagesAix-Configure SNMP On AixAntonio A. BonitaPas encore d'évaluation
- Chromera Manager Users GuideDocument86 pagesChromera Manager Users GuideJosue Daniel MoralesPas encore d'évaluation
- Chapter 4. Using The Command-Line InterfaceDocument22 pagesChapter 4. Using The Command-Line InterfacePoojitha NagarajaPas encore d'évaluation