Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Solution of Discretized EquationsDocument26 pagesSolution of Discretized EquationsSandeep KadamPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- BrochureL Practitioners Course1ADocument16 pagesBrochureL Practitioners Course1Ahawxfly100% (1)
- MIT2 25F13 Problem8.02Document2 pagesMIT2 25F13 Problem8.02hawxflyPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- 921 JFM Final PDFDocument33 pages921 JFM Final PDFhawxflyPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Video 3Document12 pagesVideo 3hawxflyPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- 4 Double Effect Solar Absorption Thermal Energy StorageDocument17 pages4 Double Effect Solar Absorption Thermal Energy StoragehawxflyPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Roache 1997Document38 pagesRoache 1997hawxflyPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Questão 2 Mais CompletaDocument20 pagesQuestão 2 Mais CompletaparrotgentilePas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Problem Set FD 2dheatDocument9 pagesProblem Set FD 2dheatossomansPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Compact and Fast Matlab Code Solving The Incompressible Navier-Stokes Equations On Rectangular Domains Mit18086 Navierstokes.mDocument16 pagesA Compact and Fast Matlab Code Solving The Incompressible Navier-Stokes Equations On Rectangular Domains Mit18086 Navierstokes.mhlkatkPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Gro EbnerDocument68 pagesGro EbnerhawxflyPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- BITSAT Solved Paper 2013 PDFDocument14 pagesBITSAT Solved Paper 2013 PDFSamip TripathyPas encore d'évaluation
- Video 6Document9 pagesVideo 6hawxflyPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Chemical Reaction Engineering. LevenspielDocument15 pagesChemical Reaction Engineering. LevenspielcespinaPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Complex AnalysisDocument53 pagesComplex AnalysisGeorgiana ZavoiPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- PS#2 Conduction 1395 Sem2Document2 pagesPS#2 Conduction 1395 Sem2hawxfly0% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Psi OmegaDocument10 pagesPsi OmegaPranav VyasPas encore d'évaluation
- MA 2215 NUMERICAL ANALYSIS - Formulae Sheet: 1. Iterative ProcessesDocument4 pagesMA 2215 NUMERICAL ANALYSIS - Formulae Sheet: 1. Iterative ProcesseshawxflyPas encore d'évaluation
- Repeated EigenvaluesDocument2 pagesRepeated EigenvaluessofelsbabaPas encore d'évaluation
- $Lufrqglwlrq&Rqwuro6/Vwhpri:Hdylqj:Runvkrs%Dvhg RQ/DE9, (Document5 pages$Lufrqglwlrq&Rqwuro6/Vwhpri:Hdylqj:Runvkrs%Dvhg RQ/DE9, (hawxflyPas encore d'évaluation
- Complex ManifoldsDocument3 pagesComplex ManifoldsDariusTothPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Implementation of A Beam Element in FEA Using MATLAB: (Type The Document Subtitle)Document12 pagesImplementation of A Beam Element in FEA Using MATLAB: (Type The Document Subtitle)akankshag_13Pas encore d'évaluation
- Arnold - Complex Analysis PDFDocument39 pagesArnold - Complex Analysis PDFhawxflyPas encore d'évaluation
- Solving Ordinary Differential Equations With MatlabDocument22 pagesSolving Ordinary Differential Equations With MatlabMario ZamoraPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Physics Work PDFDocument12 pagesPhysics Work PDFhawxflyPas encore d'évaluation
- IES Mechanical Engineering Question PaperDocument17 pagesIES Mechanical Engineering Question PaperSimran SinghPas encore d'évaluation
- Annals 2012 3 21Document6 pagesAnnals 2012 3 21hawxflyPas encore d'évaluation
- Lecture 13Document6 pagesLecture 13Qaisar HayatPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- The Flow of Real FluidsDocument35 pagesThe Flow of Real Fluidsbakhtyar21Pas encore d'évaluation
- Lec4Statics Moment of A Forcepptx 1Document54 pagesLec4Statics Moment of A Forcepptx 1Jared RosePas encore d'évaluation
- Wishart DistributionDocument6 pagesWishart DistributionJavier Garcia RajoyPas encore d'évaluation
- Lec 10 Gauss Elimination1Document27 pagesLec 10 Gauss Elimination1Fahad MahmoodPas encore d'évaluation
- MATH 8 Test Questions SY 2022-2023 - QIIDocument4 pagesMATH 8 Test Questions SY 2022-2023 - QIIRYAN C. ENRIQUEZPas encore d'évaluation
- Notes - M1 Unit 5Document7 pagesNotes - M1 Unit 5Aniket AgvanePas encore d'évaluation
- Calculator Techniques PDFDocument25 pagesCalculator Techniques PDFDaniel Dani Fabs Fabila100% (11)
- Xi Maths Module-1 (Matrix)Document144 pagesXi Maths Module-1 (Matrix)VENKATESH YPas encore d'évaluation
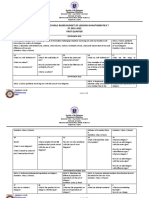
- Simplified Melc-Based Budget of Lessons in Mathematics 7 SY 2021-2022 First QuarterDocument15 pagesSimplified Melc-Based Budget of Lessons in Mathematics 7 SY 2021-2022 First QuarterJasmin Move-RamirezPas encore d'évaluation
- FP2C7 Maclaurin and Taylor SeriesDocument2 pagesFP2C7 Maclaurin and Taylor SeriesLoh Jun XianPas encore d'évaluation
- Can Schönhage Multiplication Speed Up The RSA Encryption or Decryption?Document45 pagesCan Schönhage Multiplication Speed Up The RSA Encryption or Decryption?Quyền NguyễnPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- STML 37 PrevDocument51 pagesSTML 37 PrevArvey Sebastian Velandia Rodriguez -2143414Pas encore d'évaluation
- Agmon 1964Document58 pagesAgmon 1964CoPas encore d'évaluation
- Winter School Maths RevisionDocument30 pagesWinter School Maths RevisionAthiPas encore d'évaluation
- AI-ML Class-01Document42 pagesAI-ML Class-01Mihir PatelPas encore d'évaluation
- FEM BitsDocument3 pagesFEM BitsDarbhalaPavanKumarPas encore d'évaluation
- B. 14.1 AB WKSHT HW Also Add Your Turn Problems P 440 To This For HWDocument2 pagesB. 14.1 AB WKSHT HW Also Add Your Turn Problems P 440 To This For HWShaira ClamorPas encore d'évaluation
- JEE Main Maths Sequence and Series Previous Year Questions With SolutionsDocument6 pagesJEE Main Maths Sequence and Series Previous Year Questions With SolutionsGautam GunjanPas encore d'évaluation
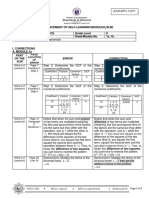
- Enhancement of Self-Learning Modules (SLM)Document2 pagesEnhancement of Self-Learning Modules (SLM)hunkmangePas encore d'évaluation
- 1.1 The Real Number System: Types of NumbersDocument4 pages1.1 The Real Number System: Types of NumbersAmna GhaffarPas encore d'évaluation
- QS 015/1 Matriculation Programme Examination Semester I Session 2013/2014Document18 pagesQS 015/1 Matriculation Programme Examination Semester I Session 2013/2014Dinie BidiPas encore d'évaluation
- Problems On Properties of DeterminantsDocument4 pagesProblems On Properties of Determinants666667Pas encore d'évaluation
- Notes On Fourier Series and Fourier Transforms: 1 Periodic FunctionsDocument6 pagesNotes On Fourier Series and Fourier Transforms: 1 Periodic FunctionsJohnny johnsonPas encore d'évaluation
- B1 CLAT3 18MAB101T Calculus and Linear AlgebraDocument18 pagesB1 CLAT3 18MAB101T Calculus and Linear AlgebraANISH PATIL (RA2111029010064)Pas encore d'évaluation
- Dot Product PDFDocument9 pagesDot Product PDFShahnaj ParvinPas encore d'évaluation
- Simple Addition Same Denominator No Wholes v1Document2 pagesSimple Addition Same Denominator No Wholes v1JuhayraVillacrucisPas encore d'évaluation
- 4curve Fitting TechniquesDocument32 pages4curve Fitting TechniquesSubhankarGangulyPas encore d'évaluation
- Mathematics7 Q2 Mod25 Multiplication-Of-Polynomials V3Document26 pagesMathematics7 Q2 Mod25 Multiplication-Of-Polynomials V3Alcel Grace AsuquePas encore d'évaluation
- Photomath Algebra SolutionDocument2 pagesPhotomath Algebra SolutionRahul SinghPas encore d'évaluation
- Problem Set 1Document2 pagesProblem Set 1arvind muraliPas encore d'évaluation
- Differential Geometry of Curves and Surfaces by Manfredo Perdigão Do Carmo Homework4Document4 pagesDifferential Geometry of Curves and Surfaces by Manfredo Perdigão Do Carmo Homework4publicacc71Pas encore d'évaluation
- Calculus Workbook For Dummies with Online PracticeD'EverandCalculus Workbook For Dummies with Online PracticeÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeD'EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeÉvaluation : 4 sur 5 étoiles4/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsD'EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)