Vous aimerez peut-être aussi
- 2JZ-GTE Ignition System GuideDocument13 pages2JZ-GTE Ignition System GuideAbbode HoraniPas encore d'évaluation
- 2015+Toyota+Tundra+Repair+Manual N7 PDFDocument9 pages2015+Toyota+Tundra+Repair+Manual N7 PDFAbbode HoraniPas encore d'évaluation
- Ignition SystemDocument16 pagesIgnition SystemAbbode HoraniPas encore d'évaluation
- Emission Control (2uz-Fe)Document15 pagesEmission Control (2uz-Fe)Abbode HoraniPas encore d'évaluation
- Transfer (VF2BM)Document2 pagesTransfer (VF2BM)Abbode HoraniPas encore d'évaluation
- E19 (B), E20 (C) : Multiplex Communication SystemDocument14 pagesE19 (B), E20 (C) : Multiplex Communication SystemAbbode HoraniPas encore d'évaluation
- Brake Fluid Bleeding ProceduresDocument60 pagesBrake Fluid Bleeding ProceduresAbbode HoraniPas encore d'évaluation
- Starting (2uz-Fe)Document20 pagesStarting (2uz-Fe)Abbode HoraniPas encore d'évaluation
- Charging (5vz-Fe)Document15 pagesCharging (5vz-Fe)Abbode HoraniPas encore d'évaluation
- Service SpecificationsDocument93 pagesService SpecificationsAbbode Horani100% (2)
- ClutchDocument21 pagesClutchAbbode HoraniPas encore d'évaluation
- Service SpecificationsDocument93 pagesService SpecificationsAbbode HoraniPas encore d'évaluation
- 13e Diesel Fuel PDFDocument15 pages13e Diesel Fuel PDFAbbode HoraniPas encore d'évaluation
- Charging (5vz-Fe)Document15 pagesCharging (5vz-Fe)Abbode HoraniPas encore d'évaluation
- CLUTCHDocument21 pagesCLUTCHAbbode HoraniPas encore d'évaluation
- Immokiller 1.1 Software For Immobilizer: PDF Created With Pdffactory Pro Trial VersionDocument5 pagesImmokiller 1.1 Software For Immobilizer: PDF Created With Pdffactory Pro Trial VersionAbbode HoraniPas encore d'évaluation
- Starting (5vz-Fe)Document18 pagesStarting (5vz-Fe)Abbode HoraniPas encore d'évaluation
- Pwde9502-D Carisma 99 Chassis 22Document5 pagesPwde9502-D Carisma 99 Chassis 22Abbode HoraniPas encore d'évaluation
- SSP - 358 - Hot-Film Air-Mass Meter HFM 6Document20 pagesSSP - 358 - Hot-Film Air-Mass Meter HFM 6dromakiPas encore d'évaluation
- GR00000300 52 PDFDocument2 pagesGR00000300 52 PDFAbbode HoraniPas encore d'évaluation
- 13f Fuel SupplyDocument9 pages13f Fuel Supplyhenry_zambranoPas encore d'évaluation
- MMC 380 Workshop Manual 2005Document8 pagesMMC 380 Workshop Manual 2005Abbode HoraniPas encore d'évaluation
- 34 Rear SuspensionDocument5 pages34 Rear SuspensionAbbode HoraniPas encore d'évaluation
- Auto Cruise Control System: SectionDocument2 pagesAuto Cruise Control System: SectionAbbode HoraniPas encore d'évaluation
- Hilux 2KD PDFDocument10 pagesHilux 2KD PDFHugo PacoPas encore d'évaluation
- Chery Maintenance Manual For Oriental SonDocument13 pagesChery Maintenance Manual For Oriental SonAbbode HoraniPas encore d'évaluation
- JMC MMAY EWS Applicants ListDocument8 pagesJMC MMAY EWS Applicants ListAbbode HoraniPas encore d'évaluation
- Accelerator Control System: SectionDocument4 pagesAccelerator Control System: SectionAbbode HoraniPas encore d'évaluation
- Aw80 40leDocument3 pagesAw80 40leAbbode HoraniPas encore d'évaluation
- 6 Speed Sleeve ReplacementDocument3 pages6 Speed Sleeve ReplacementJamil ElbannaPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- ST25R3916B ST25R3917B: NFC Reader For Payment, Consumer and Industrial ApplicationsDocument163 pagesST25R3916B ST25R3917B: NFC Reader For Payment, Consumer and Industrial ApplicationsJosue MejíaPas encore d'évaluation
- Real-time bridge monitoring using IoTDocument4 pagesReal-time bridge monitoring using IoTvishalmate10Pas encore d'évaluation
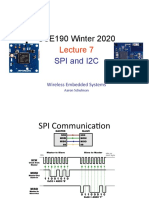
- CSE190 Winter 2020: SPI and I2CDocument17 pagesCSE190 Winter 2020: SPI and I2CliethPas encore d'évaluation
- Apple Mobile Net NamesDocument12 pagesApple Mobile Net NamesilliliPas encore d'évaluation
- T 1000S ManualDocument8 pagesT 1000S ManualAdmir BašićPas encore d'évaluation
- DM00114891-ES0253 STM32L053x6-8 Device Limitations (Version 5)Document24 pagesDM00114891-ES0253 STM32L053x6-8 Device Limitations (Version 5)Anonymous 1OlQQ3cWPas encore d'évaluation
- 02 iPASO 400-1000 Introduction 2Document32 pages02 iPASO 400-1000 Introduction 2Wubie NegaPas encore d'évaluation
- Atvaultic460 RDocument30 pagesAtvaultic460 RDaniela Cardenas LuboPas encore d'évaluation
- 6218 PDFDocument111 pages6218 PDFFrugal Labs - Digital LearnPas encore d'évaluation
- Wilc1000 DatasheetDocument28 pagesWilc1000 Datasheetvkiran_19892430Pas encore d'évaluation
- GD32VF103 Datasheet SummaryDocument70 pagesGD32VF103 Datasheet Summarydavid suwarno sukartoPas encore d'évaluation
- 3D Analog Front End: Migrating From TMS37122 and TMS37127 To TMS37126D3Document10 pages3D Analog Front End: Migrating From TMS37122 and TMS37127 To TMS37126D3captainPas encore d'évaluation
- Modul Arduino NRF24L01 Transceiver 2.4GHz TX RX Microcontroler AVR 328 N24l01 Roboromania PDFDocument12 pagesModul Arduino NRF24L01 Transceiver 2.4GHz TX RX Microcontroler AVR 328 N24l01 Roboromania PDFHanny BerchmansPas encore d'évaluation
- SPI MX25L6473F, 3V, 64Mb, v1.3Document77 pagesSPI MX25L6473F, 3V, 64Mb, v1.3Erivaldo MatePas encore d'évaluation
- Allegro A1335LLETR T Datasheet PDFDocument53 pagesAllegro A1335LLETR T Datasheet PDFeveraldoPas encore d'évaluation
- P89LPC912/913/914: 1. General DescriptionDocument63 pagesP89LPC912/913/914: 1. General Descriptionashish gautamPas encore d'évaluation
- 8-Bit PIC® MicrocontrollersDocument16 pages8-Bit PIC® MicrocontrollersPankaj Tikle100% (3)
- Uefi Firmware Enabling Guide For The Intel Atom Processor E3900 Series 820238Document42 pagesUefi Firmware Enabling Guide For The Intel Atom Processor E3900 Series 820238賴翊翊Pas encore d'évaluation
- VDX 6354 RDDocument42 pagesVDX 6354 RDSsr ShaPas encore d'évaluation
- Lenovo IdeaPad L3-15IML05 LCFC GS55C NM-C952 DIS r0.1-2Document61 pagesLenovo IdeaPad L3-15IML05 LCFC GS55C NM-C952 DIS r0.1-2Mike OttePas encore d'évaluation
- Arduino Sensor Interfacing ModuleDocument31 pagesArduino Sensor Interfacing ModuleDr. M. Thillai Rani Asst Prof ECEPas encore d'évaluation
- Can ProtocolDocument4 pagesCan ProtocolratheeshbrPas encore d'évaluation
- Pg153 Axi Quad SpiDocument120 pagesPg153 Axi Quad SpiIvan AlyaevPas encore d'évaluation
- VHF 4000 Workshop Manual Handset ControlsDocument148 pagesVHF 4000 Workshop Manual Handset Controlsfolkep100% (1)
- Embedded Systems Project IdeasDocument7 pagesEmbedded Systems Project IdeasmuzammiliqbalPas encore d'évaluation
- 1 8 TFT DisplayDocument69 pages1 8 TFT DisplayBen sayari Mohamed AminePas encore d'évaluation
- EE8691-Embedded SystemsDocument12 pagesEE8691-Embedded SystemsumramanPas encore d'évaluation
- 128-Megabit 2.7-Volt Dual-Interface Dataflash At45Db1282 PreliminaryDocument35 pages128-Megabit 2.7-Volt Dual-Interface Dataflash At45Db1282 PreliminarymhasansharifiPas encore d'évaluation
- FPGA Based System Design Suitable For Wireless Health Monitoring Employing Intelligent RF ModuleDocument4 pagesFPGA Based System Design Suitable For Wireless Health Monitoring Employing Intelligent RF Modulechaitanya sPas encore d'évaluation
- It8951 Usb FaqDocument7 pagesIt8951 Usb FaqSteven PengPas encore d'évaluation