Vous aimerez peut-être aussi
- KONCAR - Stray Losses - How To Reduce Them and WhyDocument2 pagesKONCAR - Stray Losses - How To Reduce Them and WhyNjkt CADPas encore d'évaluation
- Kiani, M., Lee, W.-J., Kenarangui, R., & Fahimi, B. (2007) - Detection of Rotor Faults in Synchronous GeneratorsDocument6 pagesKiani, M., Lee, W.-J., Kenarangui, R., & Fahimi, B. (2007) - Detection of Rotor Faults in Synchronous GeneratorsjuanPas encore d'évaluation
- Optimal Design of Large Permanent Magnet Synchronous GeneratorsDocument9 pagesOptimal Design of Large Permanent Magnet Synchronous GeneratorsMurat Erhan BalciPas encore d'évaluation
- Paper 8 - Additional Losses - Damper Winding - Hydrogenerators at Open-Circuit and Load Conditions - Traxler-SamekDocument7 pagesPaper 8 - Additional Losses - Damper Winding - Hydrogenerators at Open-Circuit and Load Conditions - Traxler-SamekNicolás NielsenPas encore d'évaluation
- FluxMag54 Hydro Generator Skin EffectDocument3 pagesFluxMag54 Hydro Generator Skin EffectSrinivas KamarsuPas encore d'évaluation
- ( (Free Energy - MAGNET) ) Optimum Values For Magnet and Armature Winding Thickness For Axial-Field Permanent Magnet Brushless DC MotorsDocument8 pages( (Free Energy - MAGNET) ) Optimum Values For Magnet and Armature Winding Thickness For Axial-Field Permanent Magnet Brushless DC MotorsMourad hosniPas encore d'évaluation
- Design Procedure of A Permanent MagnetDocument4 pagesDesign Procedure of A Permanent MagnetJignesh LoharPas encore d'évaluation
- Performance Comparision of Internal and External Rotor Structured Wind Generators Mounted From Same Permanent Magnets On Same GeometryDocument6 pagesPerformance Comparision of Internal and External Rotor Structured Wind Generators Mounted From Same Permanent Magnets On Same GeometryHaider AddewanyPas encore d'évaluation
- Rotor-Shape Optimization of Interior-Permanent-Magnet Motors To Reduce Harmonic Iron LossesDocument9 pagesRotor-Shape Optimization of Interior-Permanent-Magnet Motors To Reduce Harmonic Iron LossesVahid KarimiPas encore d'évaluation
- A Frequency Domain Detection of Stator WDocument8 pagesA Frequency Domain Detection of Stator Wfares noureddinePas encore d'évaluation
- Analysis and Reduction of Time Harmonic Rotor Loss in Solid-Rotor Synchronous Reluctance DriveDocument8 pagesAnalysis and Reduction of Time Harmonic Rotor Loss in Solid-Rotor Synchronous Reluctance DrivemitsuiPas encore d'évaluation
- Iemdc 1999 769189Document3 pagesIemdc 1999 769189hamidrezaPas encore d'évaluation
- Prediction of Losses and Efficiency For Three-Phase Induction Machines EquippedDocument10 pagesPrediction of Losses and Efficiency For Three-Phase Induction Machines EquippedAwal UdinPas encore d'évaluation
- Ger 3183Document14 pagesGer 3183rizwanPas encore d'évaluation
- Inspection of Stator Cores in Large Machines With A Low Yoke Induction Method-Measurement and Analysis of Interlamination Short-CircuitsDocument7 pagesInspection of Stator Cores in Large Machines With A Low Yoke Induction Method-Measurement and Analysis of Interlamination Short-CircuitsPedro Alva ArcePas encore d'évaluation
- Thermal Analysis of Induction and Synchronous Reluctance MotorsDocument6 pagesThermal Analysis of Induction and Synchronous Reluctance MotorsShraddha kalePas encore d'évaluation
- Application of Magnetic Wedges For Stator Slots of HydrogeneratorsDocument8 pagesApplication of Magnetic Wedges For Stator Slots of HydrogeneratorsRezmerita FlorinPas encore d'évaluation
- Novel Flux Linkage Estimation Algorithm For A Variable Flux PMSMDocument17 pagesNovel Flux Linkage Estimation Algorithm For A Variable Flux PMSMViệt Anh PhạmPas encore d'évaluation
- An Improved Transformer For LLC Resonant Inverter For Induction Heating ApplicationsDocument8 pagesAn Improved Transformer For LLC Resonant Inverter For Induction Heating ApplicationsIvan PopovicPas encore d'évaluation
- A Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesDocument11 pagesA Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesTarak BenslimanePas encore d'évaluation
- Module 3 - 2&16marksDocument25 pagesModule 3 - 2&16markskesavantPas encore d'évaluation
- Surge Arresters Improve 132kV Transmission Line Lightning PerformanceDocument5 pagesSurge Arresters Improve 132kV Transmission Line Lightning PerformanceHải HồPas encore d'évaluation
- Artigo GMDocument8 pagesArtigo GMMarc LaranjoPas encore d'évaluation
- Design Permanent Magnet Motor Water Jacket Cooled MotorDocument5 pagesDesign Permanent Magnet Motor Water Jacket Cooled Motorhpham2005Pas encore d'évaluation
- Characterization and Modeling of Soft Magnetic Materials For Improved Estimation of PWM-Induced Iron LossDocument8 pagesCharacterization and Modeling of Soft Magnetic Materials For Improved Estimation of PWM-Induced Iron LossJohn WickPas encore d'évaluation
- Effect Armature Reaction The Magnet Motor: of and On Performance of Radial-Flux Permanent BrushlessDocument5 pagesEffect Armature Reaction The Magnet Motor: of and On Performance of Radial-Flux Permanent BrushlessSuman SahaPas encore d'évaluation
- Calculating Iron Losses Taking Into Account Effects of Manufacturing ProcessesDocument4 pagesCalculating Iron Losses Taking Into Account Effects of Manufacturing ProcessesairkadPas encore d'évaluation
- A Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous MachinesDocument3 pagesA Methos For Dynamic Simulation and Detection of Dynamic Air-Gap Eccentricity in Synchronous Machinesafru2000Pas encore d'évaluation
- A Comprehensive Review of Flux Barriers in InterioDocument14 pagesA Comprehensive Review of Flux Barriers in InterioSuman SahaPas encore d'évaluation
- Enwinding Monitoring and VibrationDocument6 pagesEnwinding Monitoring and VibrationAnonymous BBX2E87aHPas encore d'évaluation
- Design Rotor V-Shape Permanent Magnets-GoodDocument4 pagesDesign Rotor V-Shape Permanent Magnets-Goodhpham2005Pas encore d'évaluation
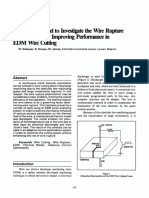
- Thermal Model To Investigate The Wire RuptureDocument12 pagesThermal Model To Investigate The Wire RuptureThi Phuong Thanh LePas encore d'évaluation
- Demagnetization of Modular PM MachinesDocument7 pagesDemagnetization of Modular PM MachinesMartin FurlanPas encore d'évaluation
- Chapter 6: Stray Loss Terminology For The Power Transformer and It'S Perspective Analysis For Design OptimizationDocument17 pagesChapter 6: Stray Loss Terminology For The Power Transformer and It'S Perspective Analysis For Design OptimizationxiaomiPas encore d'évaluation
- Internal test-3DEMDocument2 pagesInternal test-3DEMsuryaeeePas encore d'évaluation
- Analysis of Offset-Mho Relay For Out of Step and Loss of Excitation Protection For PLTU Suralaya Unit 1-2Document5 pagesAnalysis of Offset-Mho Relay For Out of Step and Loss of Excitation Protection For PLTU Suralaya Unit 1-2Muhamad R. FabioPas encore d'évaluation
- Equivalent Broadband Electrical Circuit of Synchronous Machine Winding For Frequency Response Analysis Based On Gray Box ModelDocument10 pagesEquivalent Broadband Electrical Circuit of Synchronous Machine Winding For Frequency Response Analysis Based On Gray Box ModelrodineicarraroPas encore d'évaluation
- Analysis of Permanent-Magnet Brushless DC Motor ParametersDocument4 pagesAnalysis of Permanent-Magnet Brushless DC Motor Parameterslupillorivera9981Pas encore d'évaluation
- Advanced Diagnosis of Electrical FaultsDocument13 pagesAdvanced Diagnosis of Electrical Faultsfares noureddinePas encore d'évaluation
- DD Comp20 Fault-Tolerant Operation of A Novel Dual-Channel Switched Reluctance Motor Using Two 3-Phase Standard InvertersDocument5 pagesDD Comp20 Fault-Tolerant Operation of A Novel Dual-Channel Switched Reluctance Motor Using Two 3-Phase Standard InvertersAhmet Can YULAFPas encore d'évaluation
- Modeling and Mitigation of Rotor Eddy-Current Losses in High-Speed Solid-Rotor Induction Machines by A Virtual Permanent Magnet Harmonic MachineDocument13 pagesModeling and Mitigation of Rotor Eddy-Current Losses in High-Speed Solid-Rotor Induction Machines by A Virtual Permanent Magnet Harmonic MachineAmit sahaPas encore d'évaluation
- High Efficiency Motors Type 2 Coordination Motor Starting - NHPTNL74-IndDocument8 pagesHigh Efficiency Motors Type 2 Coordination Motor Starting - NHPTNL74-IndsimranPas encore d'évaluation
- Gents CH 2014Document4 pagesGents CH 2014Jigyesh SharmaPas encore d'évaluation
- Application of Magnetic Wedges For Stator Slots of HydrogeneratorsDocument8 pagesApplication of Magnetic Wedges For Stator Slots of HydrogeneratorsPit Sampras100% (1)
- 03 - Thomson Et Al - Current Signature Analysis To Detect Induction Motors FaultsDocument9 pages03 - Thomson Et Al - Current Signature Analysis To Detect Induction Motors FaultsCar AljaPas encore d'évaluation
- Ferrite Circulator SwitchesDocument2 pagesFerrite Circulator SwitchesAmit KumarPas encore d'évaluation
- Corona Phenomena From Water Conductors Under High Direct: Drops On Smooth VoltageDocument8 pagesCorona Phenomena From Water Conductors Under High Direct: Drops On Smooth Voltageboxeli2281Pas encore d'évaluation
- Rotor PDFDocument13 pagesRotor PDFIvan Contrreras QuispePas encore d'évaluation
- PMSM Modelling PaperDocument12 pagesPMSM Modelling Paperpranay uniyalPas encore d'évaluation
- PM BLDC Motors: Structure, Operation and ApplicationsDocument25 pagesPM BLDC Motors: Structure, Operation and ApplicationsDEEPAPas encore d'évaluation
- TJE Miller Design of SRMDocument13 pagesTJE Miller Design of SRMmanasrinuPas encore d'évaluation
- Design and Analysis of New Class Brushless DC Motor FSMDocument5 pagesDesign and Analysis of New Class Brushless DC Motor FSMKitaba TolesaPas encore d'évaluation
- 9470 English TarjomeFaDocument10 pages9470 English TarjomeFatusarPas encore d'évaluation
- Damper Winding Fault Analysis in Synchronous Machines: September 2018Document8 pagesDamper Winding Fault Analysis in Synchronous Machines: September 2018enmelmartPas encore d'évaluation
- MIT6 685F13 Chapter1 PDFDocument18 pagesMIT6 685F13 Chapter1 PDFJack SoPas encore d'évaluation
- Analytical Design of Axial Flux PMG For Low Speed Direct DriveDocument11 pagesAnalytical Design of Axial Flux PMG For Low Speed Direct DriveSeksan KhamkaewPas encore d'évaluation
- Voltage Amplification, Trail Cable Length & Power ShovelsDocument9 pagesVoltage Amplification, Trail Cable Length & Power ShovelsMaikPortnoyPas encore d'évaluation
- Upgrading Generator Protection Using Digital TechnologyDocument8 pagesUpgrading Generator Protection Using Digital TechnologyAngel De la CruzPas encore d'évaluation
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- 7 0 PDFDocument6 pages7 0 PDFNur Muhammad DzikriPas encore d'évaluation
- Design of Low Speed Axial Flux PM Generators for Marine CurrentsDocument58 pagesDesign of Low Speed Axial Flux PM Generators for Marine CurrentsNur Muhammad DzikriPas encore d'évaluation
- Axial Flux PM Generator Toridal Winding For Wind Turbine 2005Document7 pagesAxial Flux PM Generator Toridal Winding For Wind Turbine 2005Thamo TharanPas encore d'évaluation
- Elda01 2Document8 pagesElda01 2Nur Muhammad DzikriPas encore d'évaluation
- Gynecologist CV TemplateDocument6 pagesGynecologist CV TemplateSingh ViratPas encore d'évaluation
- 19 Speed PDFDocument8 pages19 Speed PDFNur Muhammad DzikriPas encore d'évaluation
- Multi Pole Permanent Magnet Generator For Wind TurbinesDocument10 pagesMulti Pole Permanent Magnet Generator For Wind TurbinesMyint SoePas encore d'évaluation
- 7 0 PDFDocument6 pages7 0 PDFNur Muhammad DzikriPas encore d'évaluation
- Content UM 201206 20120622103458211 GT-N7000 UM EU Icecream Eng Rev.1.1 120517 ScreenDocument200 pagesContent UM 201206 20120622103458211 GT-N7000 UM EU Icecream Eng Rev.1.1 120517 ScreenNur Muhammad DzikriPas encore d'évaluation
- One PieceDocument1 pageOne PieceNur Muhammad DzikriPas encore d'évaluation
- Module For Hyperbolic GeometryDocument41 pagesModule For Hyperbolic GeometryShela RamosPas encore d'évaluation
- PAG 03.1 - Determination of ResistivityDocument3 pagesPAG 03.1 - Determination of ResistivityjmsonlPas encore d'évaluation
- Case 3:09 CV 01494 MODocument13 pagesCase 3:09 CV 01494 MOAnonymous HiNeTxLMPas encore d'évaluation
- Code of EthicsDocument8 pagesCode of EthicsviorelPas encore d'évaluation
- Template For Group AssignmentDocument5 pagesTemplate For Group AssignmentIntan QamariaPas encore d'évaluation
- HDPS 1303 - 930425105424Document6 pagesHDPS 1303 - 930425105424Cheryl LimPas encore d'évaluation
- GSP Action PlanDocument2 pagesGSP Action PlanTen Victa-Milano100% (3)
- Kinder DLP Lesson-Exemplar-Week-25-Day-2Document16 pagesKinder DLP Lesson-Exemplar-Week-25-Day-2Leonor BagnosPas encore d'évaluation
- Group Project Assignment Imc407Document4 pagesGroup Project Assignment Imc407Anonymous nyN7IVBMPas encore d'évaluation
- DSP Question Paper April 2012Document2 pagesDSP Question Paper April 2012Famida Begam100% (1)
- Electronics Engineering Technician: Semiconductor ComponentsDocument253 pagesElectronics Engineering Technician: Semiconductor Componentsnagsanthosh3Pas encore d'évaluation
- Jurisidiction of MeTC, MTC, MCTC, MuTCDocument3 pagesJurisidiction of MeTC, MTC, MCTC, MuTCKENEDY FLORESPas encore d'évaluation
- Essays in ExistentialismDocument4 pagesEssays in Existentialismafibaixzyhpqmc100% (2)
- Motor Driving School ReportDocument39 pagesMotor Driving School ReportAditya Krishnakumar73% (11)
- Clinical Psychopathology PDFDocument5 pagesClinical Psychopathology PDFelvinegunawan50% (2)
- Writing Essays B1Document6 pagesWriting Essays B1Manuel Jose Arias TabaresPas encore d'évaluation
- 2C 2I 1R Pedagogical ApproachesDocument9 pages2C 2I 1R Pedagogical ApproachesMenchelyn MarasiganPas encore d'évaluation
- An Exploratory Study of Personal Calendar UseDocument23 pagesAn Exploratory Study of Personal Calendar UseManas Tungare100% (1)
- Oracle Induction - Introduction Foot Print and Instances For Perfect ExecutionDocument11 pagesOracle Induction - Introduction Foot Print and Instances For Perfect Executioneuge_prime2001Pas encore d'évaluation
- AntimonyDocument72 pagesAntimony沈益Pas encore d'évaluation
- Some Thoughts Upon The World of Islam Festival-London 1976 (Alistair Duncan) PDFDocument3 pagesSome Thoughts Upon The World of Islam Festival-London 1976 (Alistair Duncan) PDFIsraelPas encore d'évaluation
- Preventing Stroke PointsDocument2 pagesPreventing Stroke PointsGermán Mariano Torrez GPas encore d'évaluation
- 2nd Year Pak Studies (English Medium)Document134 pages2nd Year Pak Studies (English Medium)MUHAMMAD HASAN RAHIMPas encore d'évaluation
- q4 Mapeh 7 WHLP Leap S.test w1 w8 MagsinoDocument39 pagesq4 Mapeh 7 WHLP Leap S.test w1 w8 MagsinoFatima11 MagsinoPas encore d'évaluation
- Sheikh Yusuf Al-Qaradawi A Moderate Voice From TheDocument14 pagesSheikh Yusuf Al-Qaradawi A Moderate Voice From ThedmpmppPas encore d'évaluation
- Preventive MaintenanceDocument19 pagesPreventive Maintenancefaizan9970% (1)
- Computers in Human Behavior: Aideen Lawlor, DR Jurek KirakowskiDocument11 pagesComputers in Human Behavior: Aideen Lawlor, DR Jurek KirakowskiAlejandro BejaranoPas encore d'évaluation
- Motivation and Frustration: Understanding the Causes and Types of ConflictDocument6 pagesMotivation and Frustration: Understanding the Causes and Types of ConflictKamlakar Sadavarte100% (1)
- Pan or The DevilDocument8 pagesPan or The DevilMarguerite and Leni Johnson100% (1)
- PTC Creo Object Toolkit JavaDocument2 pagesPTC Creo Object Toolkit Javahameed100% (2)